 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReLaX: Reasoning with Latent Exploration for Large Reasoning Models
Dec 08, 2025Reinforcement Learning with Verifiable Rewards (RLVR) has recently demonstrated remarkable potential in enhancing the reasoning capability of Large Reasoning Models (LRMs). However, RLVR often leads to entropy collapse, resulting in premature policy convergence and performance saturation. While manipulating token-level entropy has proven effective for promoting policy exploration, we argue that the latent dynamics underlying token generation encode a far richer computational structure for steering policy optimization toward a more effective exploration-exploitation tradeoff. To enable tractable analysis and intervention of the latent dynamics of LRMs, we leverage Koopman operator theory to obtain a linearized representation of their hidden-state dynamics. This enables us to introduce Dynamic Spectral Dispersion (DSD), a new metric to quantify the heterogeneity of the model's latent dynamics, serving as a direct indicator of policy exploration. Building upon these foundations, we propose Reasoning with Latent eXploration (ReLaX), a paradigm that explicitly incorporates latent dynamics to regulate exploration and exploitation during policy optimization. Comprehensive experiments across a wide range of multimodal and text-only reasoning benchmarks show that ReLaX significantly mitigates premature convergence and consistently achieves state-of-the-art performance.
IML-Spikeformer: Input-aware Multi-Level Spiking Transformer for Speech Processing
Jul 10, 2025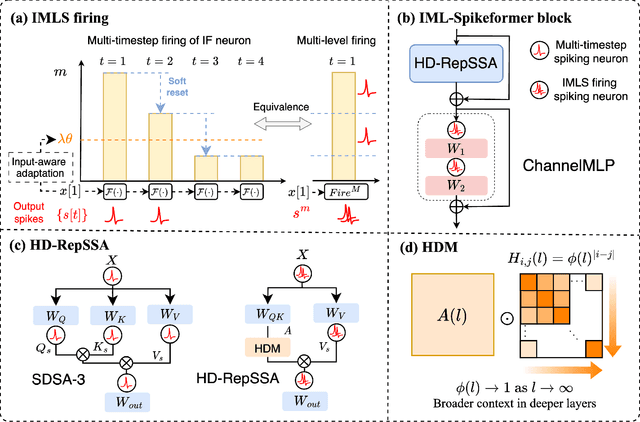
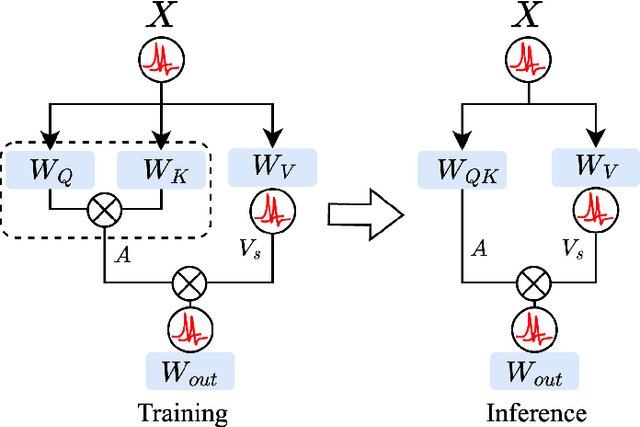
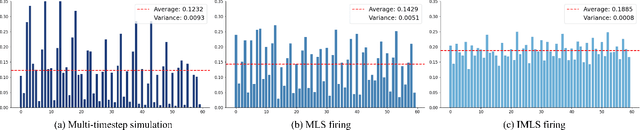
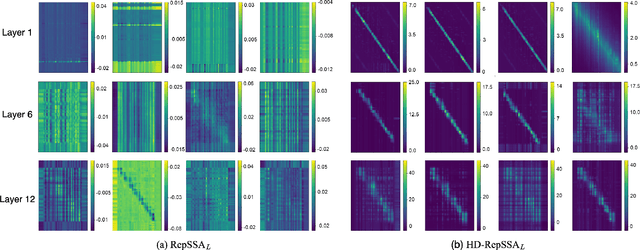
Spiking Neural Networks (SNNs), inspired by biological neural mechanisms, represent a promising neuromorphic computing paradigm that offers energy-efficient alternatives to traditional Artificial Neural Networks (ANNs). Despite proven effectiveness, SNN architectures have struggled to achieve competitive performance on large-scale speech processing task. Two key challenges hinder progress: (1) the high computational overhead during training caused by multi-timestep spike firing, and (2) the absence of large-scale SNN architectures tailored to speech processing tasks. To overcome the issues, we introduce Input-aware Multi-Level Spikeformer, i.e. IML-Spikeformer, a spiking Transformer architecture specifically designed for large-scale speech processing. Central to our design is the Input-aware Multi-Level Spike (IMLS) mechanism, which simulate multi-timestep spike firing within a single timestep using an adaptive, input-aware thresholding scheme. IML-Spikeformer further integrates a Reparameterized Spiking Self-Attention (RepSSA) module with a Hierarchical Decay Mask (HDM), forming the HD-RepSSA module. This module enhances the precision of attention maps and enables modeling of multi-scale temporal dependencies in speech signals. Experiments demonstrate that IML-Spikeformer achieves word error rates of 6.0\% on AiShell-1 and 3.4\% on Librispeech-960, comparable to conventional ANN transformers while reducing theoretical inference energy consumption by 4.64$\times$ and 4.32$\times$ respectively. IML-Spikeformer marks an advance of scalable SNN architectures for large-scale speech processing in both task performance and energy efficiency.
TC-LIF: A Two-Compartment Spiking Neuron Model for Long-term Sequential Modelling
Aug 25, 2023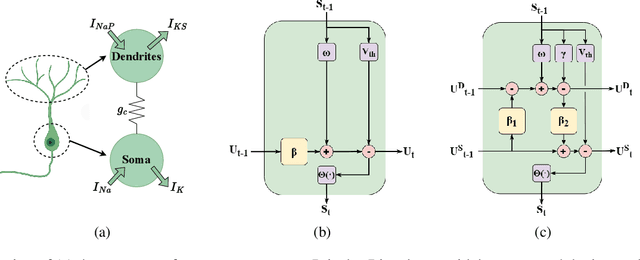



The identification of sensory cues associated with potential opportunities and dangers is frequently complicated by unrelated events that separate useful cues by long delays. As a result, it remains a challenging task for state-of-the-art spiking neural networks (SNNs) to establish long-term temporal dependency between distant cues. To address this challenge, we propose a novel biologically inspired Two-Compartment Leaky Integrate-and-Fire spiking neuron model, dubbed TC-LIF. The proposed model incorporates carefully designed somatic and dendritic compartments that are tailored to facilitate learning long-term temporal dependencies. Furthermore, a theoretical analysis is provided to validate the effectiveness of TC-LIF in propagating error gradients over an extended temporal duration. Our experimental results, on a diverse range of temporal classification tasks, demonstrate superior temporal classification capability, rapid training convergence, and high energy efficiency of the proposed TC-LIF model. Therefore, this work opens up a myriad of opportunities for solving challenging temporal processing tasks on emerging neuromorphic computing systems.
Four years of multi-modal odometry and mapping on the rail vehicles
Aug 22, 2023Precise, seamless, and efficient train localization as well as long-term railway environment monitoring is the essential property towards reliability, availability, maintainability, and safety (RAMS) engineering for railroad systems. Simultaneous localization and mapping (SLAM) is right at the core of solving the two problems concurrently. In this end, we propose a high-performance and versatile multi-modal framework in this paper, targeted for the odometry and mapping task for various rail vehicles. Our system is built atop an inertial-centric state estimator that tightly couples light detection and ranging (LiDAR), visual, optionally satellite navigation and map-based localization information with the convenience and extendibility of loosely coupled methods. The inertial sensors IMU and wheel encoder are treated as the primary sensor, which achieves the observations from subsystems to constrain the accelerometer and gyroscope biases. Compared to point-only LiDAR-inertial methods, our approach leverages more geometry information by introducing both track plane and electric power pillars into state estimation. The Visual-inertial subsystem also utilizes the environmental structure information by employing both lines and points. Besides, the method is capable of handling sensor failures by automatic reconfiguration bypassing failure modules. Our proposed method has been extensively tested in the long-during railway environments over four years, including general-speed, high-speed and metro, both passenger and freight traffic are investigated. Further, we aim to share, in an open way, the experience, problems, and successes of our group with the robotics community so that those that work in such environments can avoid these errors. In this view, we open source some of the datasets to benefit the research community.
Long Short-term Memory with Two-Compartment Spiking Neuron
Jul 14, 2023The identification of sensory cues associated with potential opportunities and dangers is frequently complicated by unrelated events that separate useful cues by long delays. As a result, it remains a challenging task for state-of-the-art spiking neural networks (SNNs) to identify long-term temporal dependencies since bridging the temporal gap necessitates an extended memory capacity. To address this challenge, we propose a novel biologically inspired Long Short-Term Memory Leaky Integrate-and-Fire spiking neuron model, dubbed LSTM-LIF. Our model incorporates carefully designed somatic and dendritic compartments that are tailored to retain short- and long-term memories. The theoretical analysis further confirms its effectiveness in addressing the notorious vanishing gradient problem. Our experimental results, on a diverse range of temporal classification tasks, demonstrate superior temporal classification capability, rapid training convergence, strong network generalizability, and high energy efficiency of the proposed LSTM-LIF model. This work, therefore, opens up a myriad of opportunities for resolving challenging temporal processing tasks on emerging neuromorphic computing machines.
TEA-PSE 3.0: Tencent-Ethereal-Audio-Lab Personalized Speech Enhancement System For ICASSP 2023 DNS Challenge
Mar 14, 2023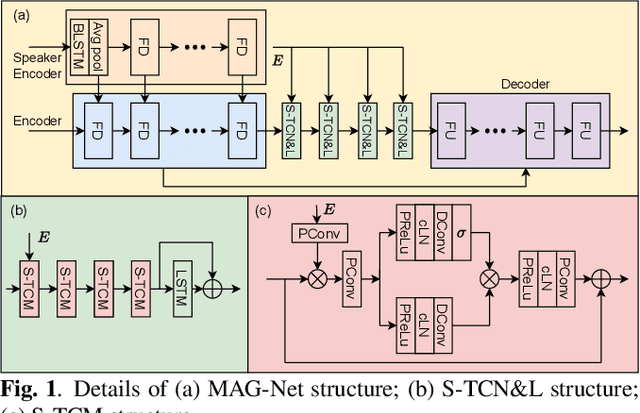


This paper introduces the Unbeatable Team's submission to the ICASSP 2023 Deep Noise Suppression (DNS) Challenge. We expand our previous work, TEA-PSE, to its upgraded version -- TEA-PSE 3.0. Specifically, TEA-PSE 3.0 incorporates a residual LSTM after squeezed temporal convolution network (S-TCN) to enhance sequence modeling capabilities. Additionally, the local-global representation (LGR) structure is introduced to boost speaker information extraction, and multi-STFT resolution loss is used to effectively capture the time-frequency characteristics of the speech signals. Moreover, retraining methods are employed based on the freeze training strategy to fine-tune the system. According to the official results, TEA-PSE 3.0 ranks 1st in both ICASSP 2023 DNS-Challenge track 1 and track 2.
Two-step Band-split Neural Network Approach for Full-band Residual Echo Suppression
Mar 13, 2023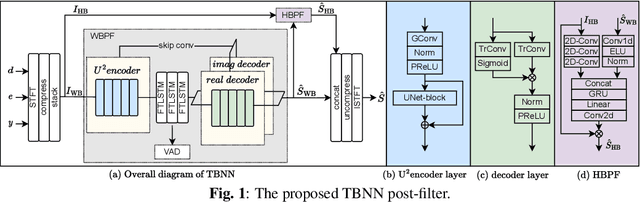

This paper describes a Two-step Band-split Neural Network (TBNN) approach for full-band acoustic echo cancellation. Specifically, after linear filtering, we split the full-band signal into wide-band (16KHz) and high-band (16-48KHz) for residual echo removal with lower modeling difficulty. The wide-band signal is processed by an updated gated convolutional recurrent network (GCRN) with U$^2$ encoder while the high-band signal is processed by a high-band post-filter net with lower complexity. Our approach submitted to ICASSP 2023 AEC Challenge has achieved an overall mean opinion score (MOS) of 4.344 and a word accuracy (WAcc) ratio of 0.795, leading to the 2$^{nd}$ (tied) in the ranking of the non-personalized track.
Personalized Acoustic Echo Cancellation for Full-duplex Communications
May 30, 2022
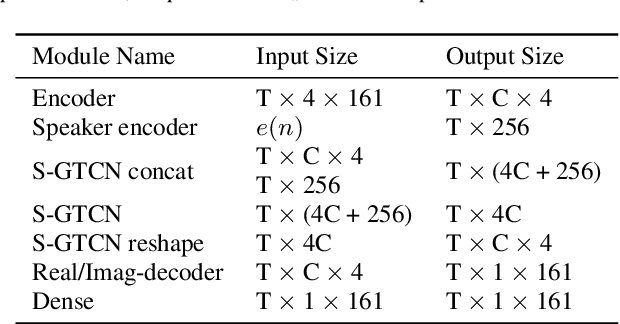
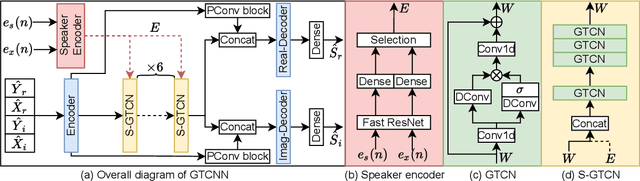
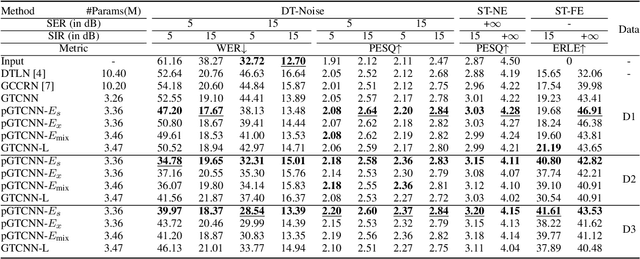
Deep neural networks (DNNs) have shown promising results for acoustic echo cancellation (AEC). But the DNN-based AEC models let through all near-end speakers including the interfering speech. In light of recent studies on personalized speech enhancement, we investigate the feasibility of personalized acoustic echo cancellation (PAEC) in this paper for full-duplex communications, where background noise and interfering speakers may coexist with acoustic echoes. Specifically, we first propose a novel backbone neural network termed as gated temporal convolutional neural network (GTCNN) that outperforms state-of-the-art AEC models in performance. Speaker embeddings like d-vectors are further adopted as auxiliary information to guide the GTCNN to focus on the target speaker. A special case in PAEC is that speech snippets of both parties on the call are enrolled. Experimental results show that auxiliary information from either the near-end speaker or the far-end speaker can improve the DNN-based AEC performance. Nevertheless, there is still much room for improvement in the utilization of the finite-dimensional speaker embeddings.
Multi-Task Deep Residual Echo Suppression with Echo-aware Loss
Feb 21, 2022
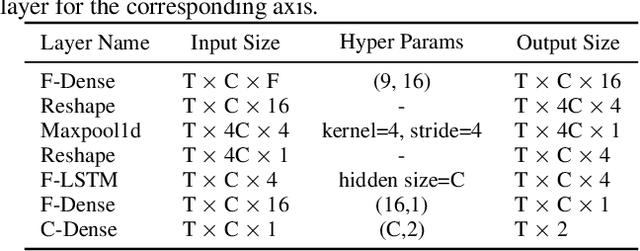
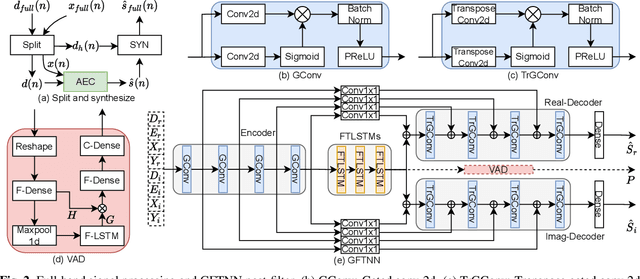

This paper introduces the NWPU Team's entry to the ICASSP 2022 AEC Challenge. We take a hybrid approach that cascades a linear AEC with a neural post-filter. The former is used to deal with the linear echo components while the latter suppresses the residual non-linear echo components. We use gated convolutional F-T-LSTM neural network (GFTNN) as the backbone and shape the post-filter by a multi-task learning (MTL) framework, where a voice activity detection (VAD) module is adopted as an auxiliary task along with echo suppression, with the aim to avoid over suppression that may cause speech distortion. Moreover, we adopt an echo-aware loss function, where the mean square error (MSE) loss can be optimized particularly for every time-frequency bin (TF-bin) according to the signal-to-echo ratio (SER), leading to further suppression on the echo. Extensive ablation study shows that the time delay estimation (TDE) module in neural post-filter leads to better perceptual quality, and an adaptive filter with better convergence will bring consistent performance gain for the post-filter. Besides, we find that using the linear echo as the input of our neural post-filter is a better choice than using the reference signal directly. In the ICASSP 2022 AEC-Challenge, our approach has ranked the 1st place on word accuracy (WAcc) (0.817) and the 3rd place on both mean opinion score (MOS) (4.502) and the final score (0.864).
Simultaneous Location of Rail Vehicles and Mapping of Environment with Multiple LiDARs
Dec 25, 2021
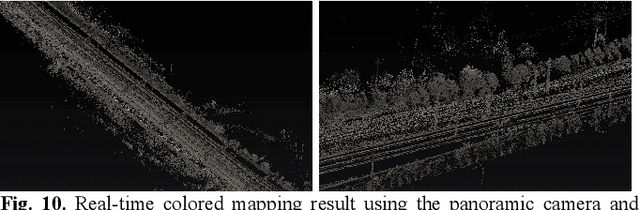
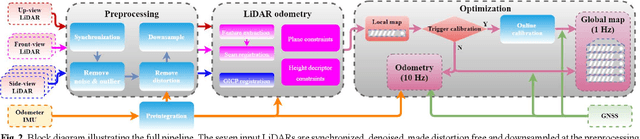
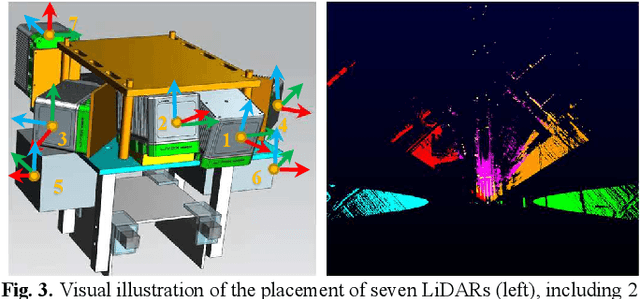
Precise and real-time rail vehicle localization as well as railway environment monitoring is crucial for railroad safety. In this letter, we propose a multi-LiDAR based simultaneous localization and mapping (SLAM) system for railway applications. Our approach starts with measurements preprocessing to denoise and synchronize multiple LiDAR inputs. Different frame-to-frame registration methods are used according to the LiDAR placement. In addition, we leverage the plane constraints from extracted rail tracks to improve the system accuracy. The local map is further aligned with global map utilizing absolute position measurements. Considering the unavoidable metal abrasion and screw loosening, online extrinsic refinement is awakened for long-during operation. The proposed method is extensively verified on datasets gathered over 3000 km. The results demonstrate that the proposed system achieves accurate and robust localization together with effective mapping for large-scale environments. Our system has already been applied to a freight traffic railroad for monitoring tasks.