 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning From a Steady Hand: A Weakly Supervised Agent for Robot Assistance under Microscopy
Jan 28, 2026This paper rethinks steady-hand robotic manipulation by using a weakly supervised framework that fuses calibration-aware perception with admittance control. Unlike conventional automation that relies on labor-intensive 2D labeling, our framework leverages reusable warm-up trajectories to extract implicit spatial information, thereby achieving calibration-aware, depth-resolved perception without the need for external fiducials or manual depth annotation. By explicitly characterizing residuals from observation and calibration models, the system establishes a task-space error budget from recorded warm-ups. The uncertainty budget yields a lateral closed-loop accuracy of approx. 49 micrometers at 95% confidence (worst-case testing subset) and a depth accuracy of <= 291 micrometers at 95% confidence bound during large in-plane moves. In a within-subject user study (N=8), the learned agent reduces overall NASA-TLX workload by 77.1% relative to the simple steady-hand assistance baseline. These results demonstrate that the weakly supervised agent improves the reliability of microscope-guided biomedical micromanipulation without introducing complex setup requirements, offering a practical framework for microscope-guided intervention.
Collaborative Human-Robot Surgery for Mandibular Angle Split Osteotomy: Optical Tracking based Approach
Jul 10, 2025Mandibular Angle Split Osteotomy (MASO) is a significant procedure in oral and maxillofacial surgery. Despite advances in technique and instrumentation, its success still relies heavily on the surgeon's experience. In this work, a human-robot collaborative system is proposed to perform MASO according to a preoperative plan and under guidance of a surgeon. A task decomposition methodology is used to divide the collaborative surgical procedure into three subtasks: (1) positional control and (2) orientation control, both led by the robot for precise alignment; and (3) force-control, managed by surgeon to ensure safety. Additionally, to achieve patient tracking without the need for a skull clamp, an optical tracking system (OTS) is utilized. Movement of the patient mandibular is measured with an optical-based tracker mounted on a dental occlusal splint. A registration method and Robot-OTS calibration method are introduced to achieve reliable navigation within our framework. The experiments of drilling were conducted on the realistic phantom model, which demonstrated that the average error between the planned and actual drilling points is 1.85mm.
Large Language Model-Driven Code Compliance Checking in Building Information Modeling
Jun 25, 2025



This research addresses the time-consuming and error-prone nature of manual code compliance checking in Building Information Modeling (BIM) by introducing a Large Language Model (LLM)-driven approach to semi-automate this critical process. The developed system integrates LLMs such as GPT, Claude, Gemini, and Llama, with Revit software to interpret building codes, generate Python scripts, and perform semi-automated compliance checks within the BIM environment. Case studies on a single-family residential project and an office building project demonstrated the system's ability to reduce the time and effort required for compliance checks while improving accuracy. It streamlined the identification of violations, such as non-compliant room dimensions, material usage, and object placements, by automatically assessing relationships and generating actionable reports. Compared to manual methods, the system eliminated repetitive tasks, simplified complex regulations, and ensured reliable adherence to standards. By offering a comprehensive, adaptable, and cost-effective solution, this proposed approach offers a promising advancement in BIM-based compliance checking, with potential applications across diverse regulatory documents in construction projects.
Rethinking the Mean Teacher Strategy from the Perspective of Self-paced Learning
May 16, 2025



Semi-supervised medical image segmentation has attracted significant attention due to its potential to reduce manual annotation costs. The mean teacher (MT) strategy, commonly understood as introducing smoothed, temporally lagged consistency regularization, has demonstrated strong performance across various tasks in this field. In this work, we reinterpret the MT strategy on supervised data as a form of self-paced learning, regulated by the output agreement between the temporally lagged teacher model and the ground truth labels. This idea is further extended to incorporate agreement between a temporally lagged model and a cross-architectural model, which offers greater flexibility in regulating the learning pace and enables application to unlabeled data. Specifically, we propose dual teacher-student learning (DTSL), a framework that introduces two groups of teacher-student models with different architectures. The output agreement between the cross-group teacher and student models is used as pseudo-labels, generated via a Jensen-Shannon divergence-based consensus label generator (CLG). Extensive experiments on popular datasets demonstrate that the proposed method consistently outperforms existing state-of-the-art approaches. Ablation studies further validate the effectiveness of the proposed modules.
Intelligent Spatial Perception by Building Hierarchical 3D Scene Graphs for Indoor Scenarios with the Help of LLMs
Mar 19, 2025This paper addresses the high demand in advanced intelligent robot navigation for a more holistic understanding of spatial environments, by introducing a novel system that harnesses the capabilities of Large Language Models (LLMs) to construct hierarchical 3D Scene Graphs (3DSGs) for indoor scenarios. The proposed framework constructs 3DSGs consisting of a fundamental layer with rich metric-semantic information, an object layer featuring precise point-cloud representation of object nodes as well as visual descriptors, and higher layers of room, floor, and building nodes. Thanks to the innovative application of LLMs, not only object nodes but also nodes of higher layers, e.g., room nodes, are annotated in an intelligent and accurate manner. A polling mechanism for room classification using LLMs is proposed to enhance the accuracy and reliability of the room node annotation. Thorough numerical experiments demonstrate the system's ability to integrate semantic descriptions with geometric data, creating an accurate and comprehensive representation of the environment instrumental for context-aware navigation and task planning.
Semi-Autonomous Laparoscopic Robot Docking with Learned Hand-Eye Information Fusion
May 09, 2024In this study, we introduce a novel shared-control system for key-hole docking operations, combining a commercial camera with occlusion-robust pose estimation and a hand-eye information fusion technique. This system is used to enhance docking precision and force-compliance safety. To train a hand-eye information fusion network model, we generated a self-supervised dataset using this docking system. After training, our pose estimation method showed improved accuracy compared to traditional methods, including observation-only approaches, hand-eye calibration, and conventional state estimation filters. In real-world phantom experiments, our approach demonstrated its effectiveness with reduced position dispersion (1.23\pm 0.81 mm vs. 2.47 \pm 1.22 mm) and force dispersion (0.78\pm 0.57 N vs. 1.15 \pm 0.97 N) compared to the control group. These advancements in semi-autonomy co-manipulation scenarios enhance interaction and stability. The study presents an anti-interference, steady, and precision solution with potential applications extending beyond laparoscopic surgery to other minimally invasive procedures.
Excitation Trajectory Optimization for Dynamic Parameter Identification Using Virtual Constraints in Hands-on Robotic System
Jan 29, 2024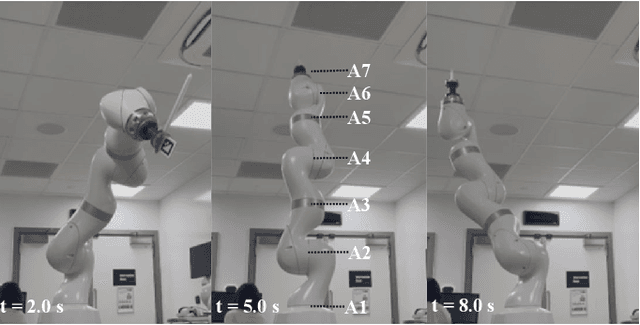

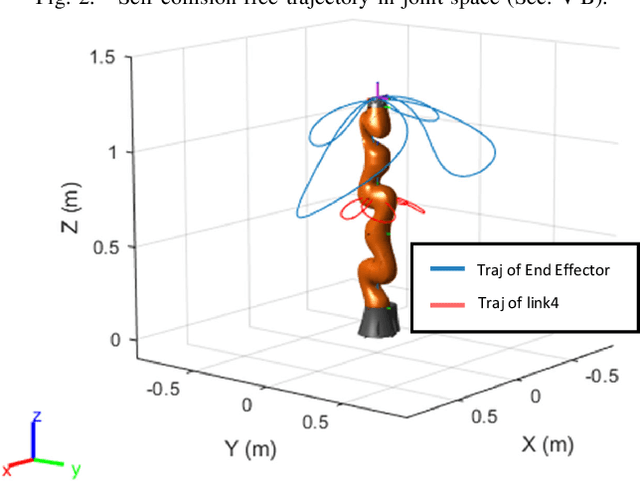
This paper proposes a novel, more computationally efficient method for optimizing robot excitation trajectories for dynamic parameter identification, emphasizing self-collision avoidance. This addresses the system identification challenges for getting high-quality training data associated with co-manipulated robotic arms that can be equipped with a variety of tools, a common scenario in industrial but also clinical and research contexts. Utilizing the Unified Robotics Description Format (URDF) to implement a symbolic Python implementation of the Recursive Newton-Euler Algorithm (RNEA), the approach aids in dynamically estimating parameters such as inertia using regression analyses on data from real robots. The excitation trajectory was evaluated and achieved on par criteria when compared to state-of-the-art reported results which didn't consider self-collision and tool calibrations. Furthermore, physical Human-Robot Interaction (pHRI) admittance control experiments were conducted in a surgical context to evaluate the derived inverse dynamics model showing a 30.1\% workload reduction by the NASA TLX questionnaire.
Two-step Band-split Neural Network Approach for Full-band Residual Echo Suppression
Mar 13, 2023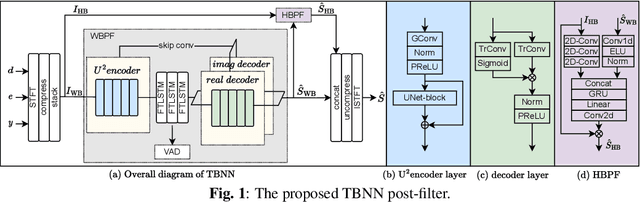

This paper describes a Two-step Band-split Neural Network (TBNN) approach for full-band acoustic echo cancellation. Specifically, after linear filtering, we split the full-band signal into wide-band (16KHz) and high-band (16-48KHz) for residual echo removal with lower modeling difficulty. The wide-band signal is processed by an updated gated convolutional recurrent network (GCRN) with U$^2$ encoder while the high-band signal is processed by a high-band post-filter net with lower complexity. Our approach submitted to ICASSP 2023 AEC Challenge has achieved an overall mean opinion score (MOS) of 4.344 and a word accuracy (WAcc) ratio of 0.795, leading to the 2$^{nd}$ (tied) in the ranking of the non-personalized track.