 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntelligent Spatial Perception by Building Hierarchical 3D Scene Graphs for Indoor Scenarios with the Help of LLMs
Mar 19, 2025This paper addresses the high demand in advanced intelligent robot navigation for a more holistic understanding of spatial environments, by introducing a novel system that harnesses the capabilities of Large Language Models (LLMs) to construct hierarchical 3D Scene Graphs (3DSGs) for indoor scenarios. The proposed framework constructs 3DSGs consisting of a fundamental layer with rich metric-semantic information, an object layer featuring precise point-cloud representation of object nodes as well as visual descriptors, and higher layers of room, floor, and building nodes. Thanks to the innovative application of LLMs, not only object nodes but also nodes of higher layers, e.g., room nodes, are annotated in an intelligent and accurate manner. A polling mechanism for room classification using LLMs is proposed to enhance the accuracy and reliability of the room node annotation. Thorough numerical experiments demonstrate the system's ability to integrate semantic descriptions with geometric data, creating an accurate and comprehensive representation of the environment instrumental for context-aware navigation and task planning.
An even-load-distribution design for composite bolted joints using a novel circuit model and artificial neural networks
May 15, 2021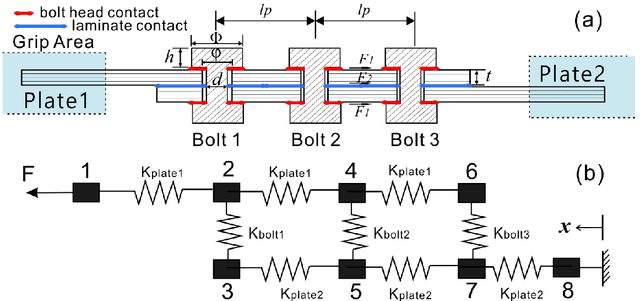
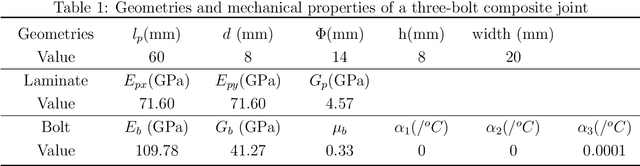
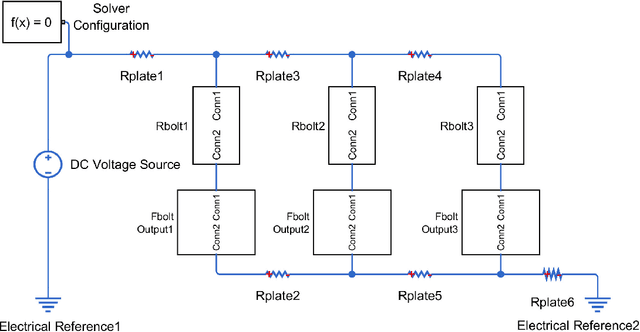
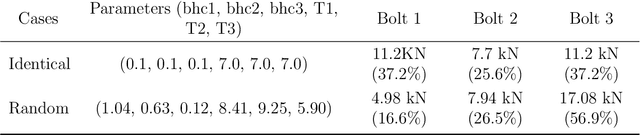
Due to the brittle feature of carbon fiber reinforced plastic laminates, mechanical multi-joint within these composite components show uneven load distribution for each bolt, which weaken the strength advantage of composite laminates. In order to reduce this defect and achieve the goal of even load distribution in mechanical joints, we propose a machine learning-based framework as an optimization method. Since that the friction effect has been proven to be a significant factor in determining bolt load distribution, our framework aims at providing optimal parameters including bolt-hole clearances and tightening torques for a minimum unevenness of bolt load. A novel circuit model is established to generate data samples for the training of artificial networks at a relatively low computational cost. A database for all the possible inputs in the design space is built through the machine learning model. The optimal dataset of clearances and torques provided by the database is validated by both the finite element method, circuit model, and an experimental measurement based on the linear superposition principle, which shows the effectiveness of this general framework for the optimization problem. Then, our machine learning model is further compared and worked in collaboration with commonly used optimization algorithms, which shows the potential of greatly increasing computational efficiency for the inverse design problem.