 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTesting Full Mediation of Treatment Effects and the Identifiability of Causal Mechanisms
Mar 04, 2026In causal analysis, understanding the causal mechanisms through which an intervention or treatment affects an outcome is often of central interest. We propose a test to evaluate (i) whether the causal effect of a treatment that is randomly assigned conditional on covariates is fully mediated by, or operates exclusively through, observed intermediate outcomes (referred to as mediators or surrogate outcomes), and (ii) whether the various causal mechanisms operating through different mediators are identifiable conditional on covariates. We demonstrate that if both full mediation and identification of causal mechanisms hold, then the conditionally random treatment is conditionally independent of the outcome given the mediators and covariates. Furthermore, we extend our framework to settings with non-randomly assigned treatments. We show that, in this case, full mediation remains testable, while identification of causal mechanisms is no longer guaranteed. We propose a double machine learning framework for implementing the test that can incorporate high-dimensional covariates and is root-n consistent and asymptotically normal under specific regularity conditions. We also present a simulation study demonstrating good finite-sample performance of our method, along with two empirical applications revisiting randomized experiments on maternal mental health and social norms.
Testing Effect Homogeneity and Confounding in High-Dimensional Experimental and Observational Studies
Feb 23, 2026We propose a framework for testing the homogeneity of conditional average treatment effects (CATEs) across multiple experimental and observational studies. Our approach leverages multiple randomized trials to assess whether treatment effects vary with unobserved heterogeneity that differs across trials: if CATEs are homogeneous, this indicates the absence of interactions between treatment and unobservables in the mean effect. Comparing CATEs between experimental and observational data further allows evaluation of potential confounding: if the estimands coincide, there is no unobserved confounding; if they differ, deviations may arise from unobserved confounding, effect heterogeneity, or both. We extend the framework to settings with alternative identification strategies, namely instrumental variable settings and panel data with parallel trends assumptions based on differences in differences, where effects are identified only locally for subpopulations such as compliers or treated units. In these contexts, testing homogeneity is useful for assessing whether local effects can be extrapolated to the total population. We suggest a test based on double machine learning that accommodates high-dimensional covariates in a data-driven way and investigate its finite-sample performance through a simulation study. Finally, we apply the test to the International Stroke Trial (IST), a large multi-country randomized controlled trial in patients with acute ischaemic stroke that evaluated whether early treatment with aspirin altered subsequent clinical outcomes. Our methodology provides a flexible tool for both validating identification assumptions and understanding the generalizability of estimated treatment effects.
Learning From a Steady Hand: A Weakly Supervised Agent for Robot Assistance under Microscopy
Jan 28, 2026This paper rethinks steady-hand robotic manipulation by using a weakly supervised framework that fuses calibration-aware perception with admittance control. Unlike conventional automation that relies on labor-intensive 2D labeling, our framework leverages reusable warm-up trajectories to extract implicit spatial information, thereby achieving calibration-aware, depth-resolved perception without the need for external fiducials or manual depth annotation. By explicitly characterizing residuals from observation and calibration models, the system establishes a task-space error budget from recorded warm-ups. The uncertainty budget yields a lateral closed-loop accuracy of approx. 49 micrometers at 95% confidence (worst-case testing subset) and a depth accuracy of <= 291 micrometers at 95% confidence bound during large in-plane moves. In a within-subject user study (N=8), the learned agent reduces overall NASA-TLX workload by 77.1% relative to the simple steady-hand assistance baseline. These results demonstrate that the weakly supervised agent improves the reliability of microscope-guided biomedical micromanipulation without introducing complex setup requirements, offering a practical framework for microscope-guided intervention.
Hydra: Marker-Free RGB-D Hand-Eye Calibration
Apr 29, 2025This work presents an RGB-D imaging-based approach to marker-free hand-eye calibration using a novel implementation of the iterative closest point (ICP) algorithm with a robust point-to-plane (PTP) objective formulated on a Lie algebra. Its applicability is demonstrated through comprehensive experiments using three well known serial manipulators and two RGB-D cameras. With only three randomly chosen robot configurations, our approach achieves approximately 90% successful calibrations, demonstrating 2-3x higher convergence rates to the global optimum compared to both marker-based and marker-free baselines. We also report 2 orders of magnitude faster convergence time (0.8 +/- 0.4 s) for 9 robot configurations over other marker-free methods. Our method exhibits significantly improved accuracy (5 mm in task space) over classical approaches (7 mm in task space) whilst being marker-free. The benchmarking dataset and code are open sourced under Apache 2.0 License, and a ROS 2 integration with robot abstraction is provided to facilitate deployment.
Evaluating Robotic Approach Techniques for the Insertion of a Straight Instrument into a Vitreoretinal Surgery Trocar
Jan 13, 2025

Advances in vitreoretinal robotic surgery enable precise techniques for gene therapies. This study evaluates three robotic approaches using the 7-DoF robotic arm for docking a micro-precise tool to a trocar: fully co-manipulated, hybrid co-manipulated/teleoperated, and hybrid with camera assistance. The fully co-manipulated approach was the fastest but had a 42% success rate. Hybrid methods showed higher success rates (91.6% and 100%) and completed tasks within 2 minutes. NASA Task Load Index (TLX) assessments indicated lower physical demand and effort for hybrid approaches.
Difference-in-Differences with Time-varying Continuous Treatments using Double/Debiased Machine Learning
Oct 28, 2024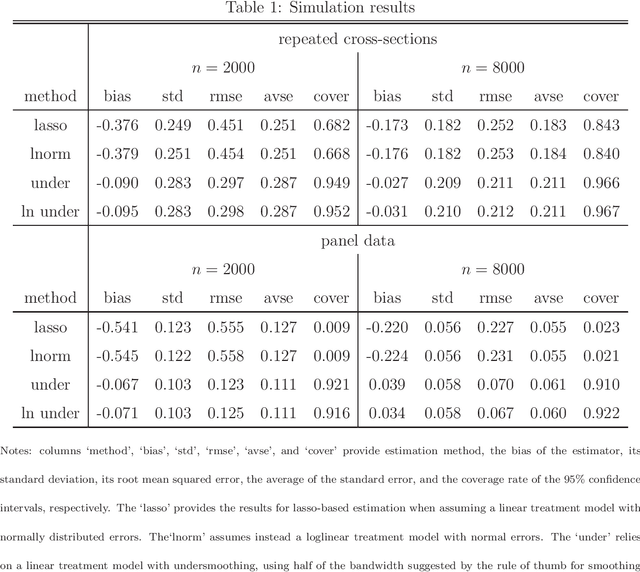
We propose a difference-in-differences (DiD) method for a time-varying continuous treatment and multiple time periods. Our framework assesses the average treatment effect on the treated (ATET) when comparing two non-zero treatment doses. The identification is based on a conditional parallel trend assumption imposed on the mean potential outcome under the lower dose, given observed covariates and past treatment histories. We employ kernel-based ATET estimators for repeated cross-sections and panel data adopting the double/debiased machine learning framework to control for covariates and past treatment histories in a data-adaptive manner. We also demonstrate the asymptotic normality of our estimation approach under specific regularity conditions. In a simulation study, we find a compelling finite sample performance of undersmoothed versions of our estimators in setups with several thousand observations.
Vision and Contact based Optimal Control for Autonomous Trocar Docking
Jul 31, 2024Future operating theatres will be equipped with robots to perform various surgical tasks including, for example, endoscope control. Human-in-the-loop supervisory control architectures where the surgeon selects from several autonomous sequences is already being successfully applied in preclinical tests. Inserting an endoscope into a trocar or introducer is a key step for every keyhole surgical procedure -- hereafter we will only refer to this device as a "trocar". Our goal is to develop a controller for autonomous trocar docking. Autonomous trocar docking is a version of the peg-in-hole problem. Extensive work in the robotics literature addresses this problem. The peg-in-hole problem has been widely studied in the context of assembly where, typically, the hole is considered static and rigid to interaction. In our case, however, the trocar is not fixed and responds to interaction. We consider a variety of surgical procedures where surgeons will utilize contact between the endoscope and trocar in order to complete the insertion successfully. To the best of our knowledge, we have not found literature that explores this particular generalization of the problem directly. Our primary contribution in this work is an optimal control formulation for automated trocar docking. We use a nonlinear optimization program to model the task, minimizing a cost function subject to constraints to find optimal joint configurations. The controller incorporates a geometric model for insertion and a force-feedback (FF) term to ensure patient safety by preventing excessive interaction forces with the trocar. Experiments, demonstrated on a real hardware lab setup, validate the approach. Our method successfully achieves trocar insertion on our real robot lab setup, and simulation trials demonstrate its ability to reduce interaction forces.
Semi-Autonomous Laparoscopic Robot Docking with Learned Hand-Eye Information Fusion
May 09, 2024In this study, we introduce a novel shared-control system for key-hole docking operations, combining a commercial camera with occlusion-robust pose estimation and a hand-eye information fusion technique. This system is used to enhance docking precision and force-compliance safety. To train a hand-eye information fusion network model, we generated a self-supervised dataset using this docking system. After training, our pose estimation method showed improved accuracy compared to traditional methods, including observation-only approaches, hand-eye calibration, and conventional state estimation filters. In real-world phantom experiments, our approach demonstrated its effectiveness with reduced position dispersion (1.23\pm 0.81 mm vs. 2.47 \pm 1.22 mm) and force dispersion (0.78\pm 0.57 N vs. 1.15 \pm 0.97 N) compared to the control group. These advancements in semi-autonomy co-manipulation scenarios enhance interaction and stability. The study presents an anti-interference, steady, and precision solution with potential applications extending beyond laparoscopic surgery to other minimally invasive procedures.
Excitation Trajectory Optimization for Dynamic Parameter Identification Using Virtual Constraints in Hands-on Robotic System
Jan 29, 2024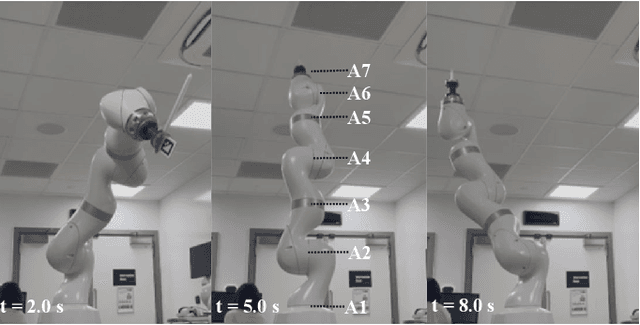

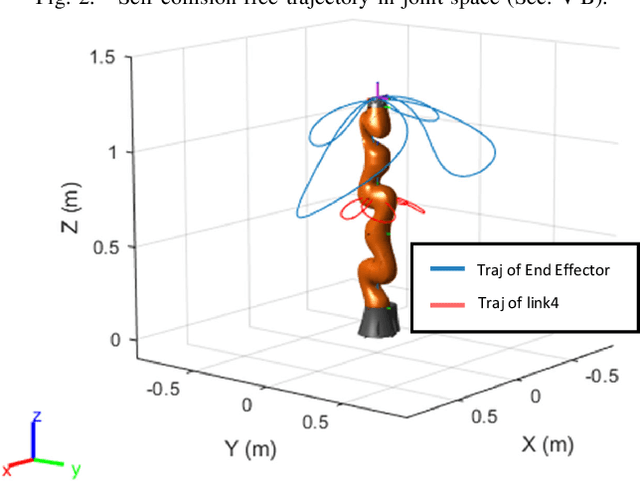
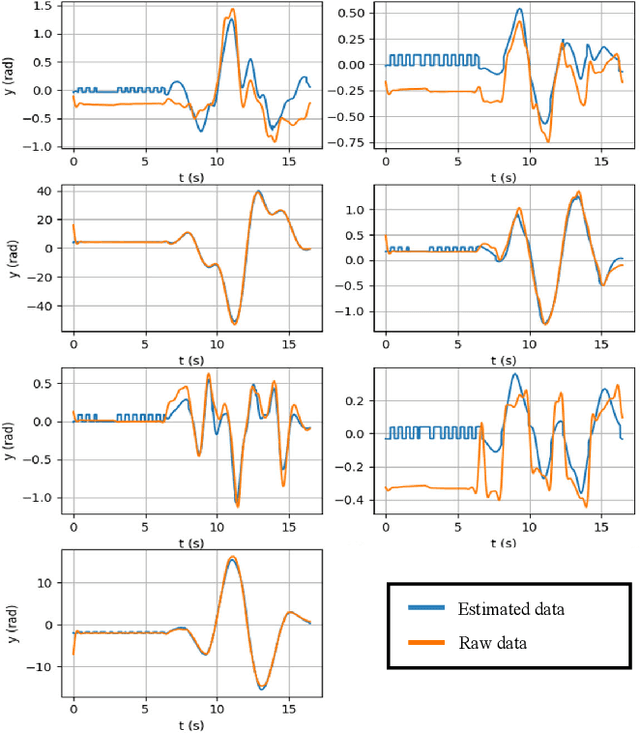
This paper proposes a novel, more computationally efficient method for optimizing robot excitation trajectories for dynamic parameter identification, emphasizing self-collision avoidance. This addresses the system identification challenges for getting high-quality training data associated with co-manipulated robotic arms that can be equipped with a variety of tools, a common scenario in industrial but also clinical and research contexts. Utilizing the Unified Robotics Description Format (URDF) to implement a symbolic Python implementation of the Recursive Newton-Euler Algorithm (RNEA), the approach aids in dynamically estimating parameters such as inertia using regression analyses on data from real robots. The excitation trajectory was evaluated and achieved on par criteria when compared to state-of-the-art reported results which didn't consider self-collision and tool calibrations. Furthermore, physical Human-Robot Interaction (pHRI) admittance control experiments were conducted in a surgical context to evaluate the derived inverse dynamics model showing a 30.1\% workload reduction by the NASA TLX questionnaire.
LBR-Stack: ROS 2 and Python Integration of KUKA FRI for Med and IIWA Robots
Nov 21, 2023


The LBR-Stack is a collection of packages that simplify the usage and extend the capabilities of KUKA's Fast Robot Interface (FRI). It is designed for mission critical hard real-time applications. Supported are the KUKA LBR Med7/14 and KUKA LBR iiwa7/14 robots in the Gazebo simulation and for communication with real hardware.