 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOOD-SEG: Out-Of-Distribution detection for image SEGmentation with sparse multi-class positive-only annotations
Nov 14, 2024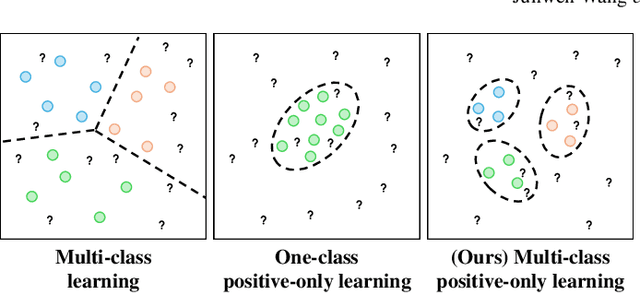


Despite significant advancements, segmentation based on deep neural networks in medical and surgical imaging faces several challenges, two of which we aim to address in this work. First, acquiring complete pixel-level segmentation labels for medical images is time-consuming and requires domain expertise. Second, typical segmentation pipelines cannot detect out-of-distribution (OOD) pixels, leaving them prone to spurious outputs during deployment. In this work, we propose a novel segmentation approach exploiting OOD detection that learns only from sparsely annotated pixels from multiple positive-only classes. %but \emph{no background class} annotation. These multi-class positive annotations naturally fall within the in-distribution (ID) set. Unlabelled pixels may contain positive classes but also negative ones, including what is typically referred to as \emph{background} in standard segmentation formulations. Here, we forgo the need for background annotation and consider these together with any other unseen classes as part of the OOD set. Our framework can integrate, at a pixel-level, any OOD detection approaches designed for classification tasks. To address the lack of existing OOD datasets and established evaluation metric for medical image segmentation, we propose a cross-validation strategy that treats held-out labelled classes as OOD. Extensive experiments on both multi-class hyperspectral and RGB surgical imaging datasets demonstrate the robustness and generalisation capability of our proposed framework.
Scribble-Based Interactive Segmentation of Medical Hyperspectral Images
Aug 05, 2024

Hyperspectral imaging (HSI) is an advanced medical imaging modality that captures optical data across a broad spectral range, providing novel insights into the biochemical composition of tissues. HSI may enable precise differentiation between various tissue types and pathologies, making it particularly valuable for tumour detection, tissue classification, and disease diagnosis. Deep learning-based segmentation methods have shown considerable advancements, offering automated and accurate results. However, these methods face challenges with HSI datasets due to limited annotated data and discrepancies from hardware and acquisition techniques~\cite{clancy2020surgical,studier2023heiporspectral}. Variability in clinical protocols also leads to different definitions of structure boundaries. Interactive segmentation methods, utilizing user knowledge and clinical insights, can overcome these issues and achieve precise segmentation results \cite{zhao2013overview}. This work introduces a scribble-based interactive segmentation framework for medical hyperspectral images. The proposed method utilizes deep learning for feature extraction and a geodesic distance map generated from user-provided scribbles to obtain the segmentation results. The experiment results show that utilising the geodesic distance maps based on deep learning-extracted features achieved better segmentation results than geodesic distance maps directly generated from hyperspectral images, reconstructed RGB images, or Euclidean distance maps.
A self-supervised and adversarial approach to hyperspectral demosaicking and RGB reconstruction in surgical imaging
Jul 27, 2024



Hyperspectral imaging holds promises in surgical imaging by offering biological tissue differentiation capabilities with detailed information that is invisible to the naked eye. For intra-operative guidance, real-time spectral data capture and display is mandated. Snapshot mosaic hyperspectral cameras are currently seen as the most suitable technology given this requirement. However, snapshot mosaic imaging requires a demosaicking algorithm to fully restore the spatial and spectral details in the images. Modern demosaicking approaches typically rely on synthetic datasets to develop supervised learning methods, as it is practically impossible to simultaneously capture both snapshot and high-resolution spectral images of the exact same surgical scene. In this work, we present a self-supervised demosaicking and RGB reconstruction method that does not depend on paired high-resolution data as ground truth. We leverage unpaired standard high-resolution surgical microscopy images, which only provide RGB data but can be collected during routine surgeries. Adversarial learning complemented by self-supervised approaches are used to drive our hyperspectral-based RGB reconstruction into resembling surgical microscopy images and increasing the spatial resolution of our demosaicking. The spatial and spectral fidelity of the reconstructed hyperspectral images have been evaluated quantitatively. Moreover, a user study was conducted to evaluate the RGB visualisation generated from these spectral images. Both spatial detail and colour accuracy were assessed by neurosurgical experts. Our proposed self-supervised demosaicking method demonstrates improved results compared to existing methods, demonstrating its potential for seamless integration into intra-operative workflows.
Deep Reinforcement Learning Based System for Intraoperative Hyperspectral Video Autofocusing
Jul 21, 2023Hyperspectral imaging (HSI) captures a greater level of spectral detail than traditional optical imaging, making it a potentially valuable intraoperative tool when precise tissue differentiation is essential. Hardware limitations of current optical systems used for handheld real-time video HSI result in a limited focal depth, thereby posing usability issues for integration of the technology into the operating room. This work integrates a focus-tunable liquid lens into a video HSI exoscope, and proposes novel video autofocusing methods based on deep reinforcement learning. A first-of-its-kind robotic focal-time scan was performed to create a realistic and reproducible testing dataset. We benchmarked our proposed autofocus algorithm against traditional policies, and found our novel approach to perform significantly ($p<0.05$) better than traditional techniques ($0.070\pm.098$ mean absolute focal error compared to $0.146\pm.148$). In addition, we performed a blinded usability trial by having two neurosurgeons compare the system with different autofocus policies, and found our novel approach to be the most favourable, making our system a desirable addition for intraoperative HSI.
Spatial gradient consistency for unsupervised learning of hyperspectral demosaicking: Application to surgical imaging
Feb 21, 2023Hyperspectral imaging has the potential to improve intraoperative decision making if tissue characterisation is performed in real-time and with high-resolution. Hyperspectral snapshot mosaic sensors offer a promising approach due to their fast acquisition speed and compact size. However, a demosaicking algorithm is required to fully recover the spatial and spectral information of the snapshot images. Most state-of-the-art demosaicking algorithms require ground-truth training data with paired snapshot and high-resolution hyperspectral images, but such imagery pairs with the exact same scene are physically impossible to acquire in intraoperative settings. In this work, we present a fully unsupervised hyperspectral image demosaicking algorithm which only requires exemplar snapshot images for training purposes. We regard hyperspectral demosaicking as an ill-posed linear inverse problem which we solve using a deep neural network. We take advantage of the spectral correlation occurring in natural scenes to design a novel inter spectral band regularisation term based on spatial gradient consistency. By combining our proposed term with standard regularisation techniques and exploiting a standard data fidelity term, we obtain an unsupervised loss function for training deep neural networks, which allows us to achieve real-time hyperspectral image demosaicking. Quantitative results on hyperspetral image datasets show that our unsupervised demosaicking approach can achieve similar performance to its supervised counter-part, and significantly outperform linear demosaicking. A qualitative user study on real snapshot hyperspectral surgical images confirms the results from the quantitative analysis. Our results suggest that the proposed unsupervised algorithm can achieve promising hyperspectral demosaicking in real-time thus advancing the suitability of the modality for intraoperative use.