 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSynthetic white balancing for intra-operative hyperspectral imaging
Jul 24, 2023Hyperspectral imaging shows promise for surgical applications to non-invasively provide spatially-resolved, spectral information. For calibration purposes, a white reference image of a highly-reflective Lambertian surface should be obtained under the same imaging conditions. Standard white references are not sterilizable, and so are unsuitable for surgical environments. We demonstrate the necessity for in situ white references and address this by proposing a novel, sterile, synthetic reference construction algorithm. The use of references obtained at different distances and lighting conditions to the subject were examined. Spectral and color reconstructions were compared with standard measurements qualitatively and quantitatively, using $\Delta E$ and normalised RMSE respectively. The algorithm forms a composite image from a video of a standard sterile ruler, whose imperfect reflectivity is compensated for. The reference is modelled as the product of independent spatial and spectral components, and a scalar factor accounting for gain, exposure, and light intensity. Evaluation of synthetic references against ideal but non-sterile references is performed using the same metrics alongside pixel-by-pixel errors. Finally, intraoperative integration is assessed though cadaveric experiments. Improper white balancing leads to increases in all quantitative and qualitative errors. Synthetic references achieve median pixel-by-pixel errors lower than 6.5% and produce similar reconstructions and errors to an ideal reference. The algorithm integrated well into surgical workflow, achieving median pixel-by-pixel errors of 4.77%, while maintaining good spectral and color reconstruction.
Deep Reinforcement Learning Based System for Intraoperative Hyperspectral Video Autofocusing
Jul 21, 2023Hyperspectral imaging (HSI) captures a greater level of spectral detail than traditional optical imaging, making it a potentially valuable intraoperative tool when precise tissue differentiation is essential. Hardware limitations of current optical systems used for handheld real-time video HSI result in a limited focal depth, thereby posing usability issues for integration of the technology into the operating room. This work integrates a focus-tunable liquid lens into a video HSI exoscope, and proposes novel video autofocusing methods based on deep reinforcement learning. A first-of-its-kind robotic focal-time scan was performed to create a realistic and reproducible testing dataset. We benchmarked our proposed autofocus algorithm against traditional policies, and found our novel approach to perform significantly ($p<0.05$) better than traditional techniques ($0.070\pm.098$ mean absolute focal error compared to $0.146\pm.148$). In addition, we performed a blinded usability trial by having two neurosurgeons compare the system with different autofocus policies, and found our novel approach to be the most favourable, making our system a desirable addition for intraoperative HSI.
Surgical Video Motion Magnification with Suppression of Instrument Artefacts
Sep 16, 2020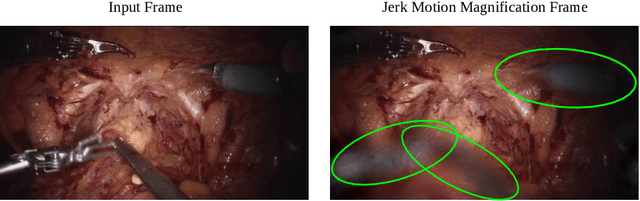
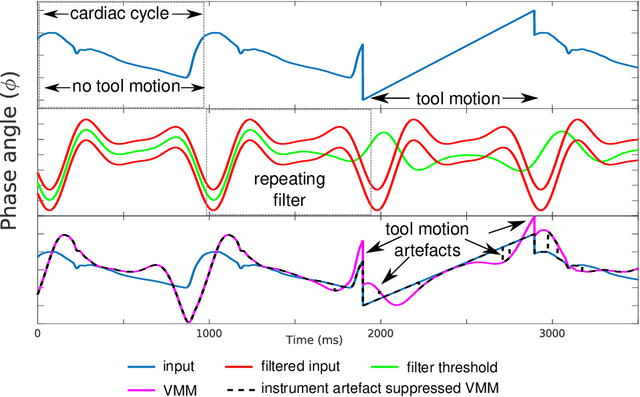
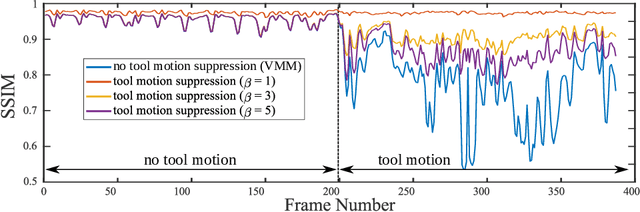

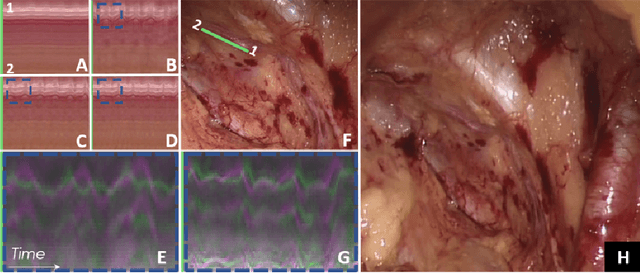
Video motion magnification could directly highlight subsurface blood vessels in endoscopic video in order to prevent inadvertent damage and bleeding. Applying motion filters to the full surgical image is however sensitive to residual motion from the surgical instruments and can impede practical application due to aberration motion artefacts. By storing the temporal filter response from local spatial frequency information for a single cardiovascular cycle prior to tool introduction to the scene, a filter can be used to determine if motion magnification should be active for a spatial region of the surgical image. In this paper, we propose a strategy to reduce aberration due to non-physiological motion for surgical video motion magnification. We present promising results on endoscopic transnasal transsphenoidal pituitary surgery with a quantitative comparison to recent methods using Structural Similarity (SSIM), as well as qualitative analysis by comparing spatio-temporal cross sections of the videos and individual frames.
Higher Order of Motion Magnification for Vessel Localisation in Surgical Video
Jun 13, 2018
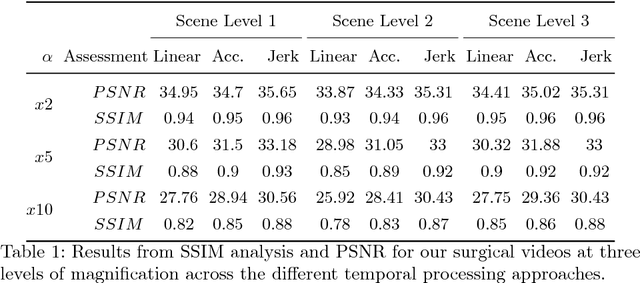
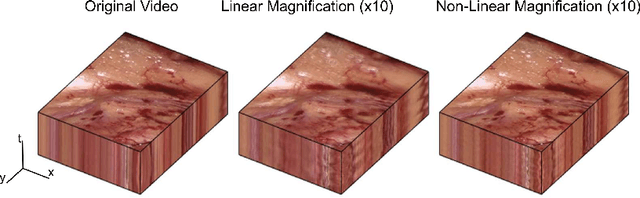
Locating vessels during surgery is critical for avoiding inadvertent damage, yet vasculature can be difficult to identify. Video motion magnification can potentially highlight vessels by exaggerating subtle motion embedded within the video to become perceivable to the surgeon. In this paper, we explore a physiological model of artery distension to extend motion magnification to incorporate higher orders of motion, leveraging the difference in acceleration over time (jerk) in pulsatile motion to highlight the vascular pulse wave. Our method is compared to first and second order motion based Eulerian video magnification algorithms. Using data from a surgical video retrieved during a robotic prostatectomy, we show that our method can accentuate cardio-physiological features and produce a more succinct and clearer video for motion magnification, with more similarities in areas without motion to the source video at large magnifications. We validate the approach with a Structure Similarity (SSIM) and Peak Signal to Noise Ratio (PSNR) assessment of three videos at an increasing working distance, using three different levels of optical magnification. Spatio-temporal cross sections are presented to show the effectiveness of our proposal and video samples are provided to demonstrates qualitatively our results.
Augmented Reality needle ablation guidance tool for Irreversible Electroporation in the pancreas
Feb 09, 2018Irreversible electroporation (IRE) is a soft tissue ablation technique suitable for treatment of inoperable tumours in the pancreas. The process involves applying a high voltage electric field to the tissue containing the mass using needle electrodes, leaving cancerous cells irreversibly damaged and vulnerable to apoptosis. Efficacy of the treatment depends heavily on the accuracy of needle placement and requires a high degree of skill from the operator. In this paper, we describe an Augmented Reality (AR) system designed to overcome the challenges associated with planning and guiding the needle insertion process. Our solution, based on the HoloLens (Microsoft, USA) platform, tracks the position of the headset, needle electrodes and ultrasound (US) probe in space. The proof of concept implementation of the system uses this tracking data to render real-time holographic guides on the HoloLens, giving the user insight into the current progress of needle insertion and an indication of the target needle trajectory. The operator's field of view is augmented using visual guides and real-time US feed rendered on a holographic plane, eliminating the need to consult external monitors. Based on these early prototypes, we are aiming to develop a system that will lower the skill level required for IRE while increasing overall accuracy of needle insertion and, hence, the likelihood of successful treatment.
Probe-based Rapid Hybrid Hyperspectral and Tissue Surface Imaging Aided by Fully Convolutional Networks
Jun 15, 2016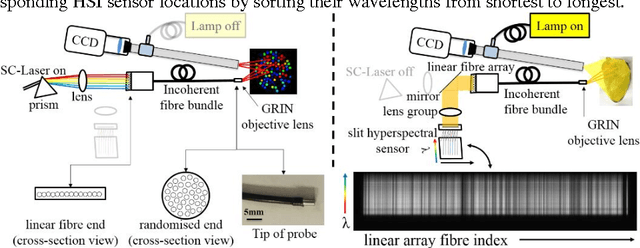
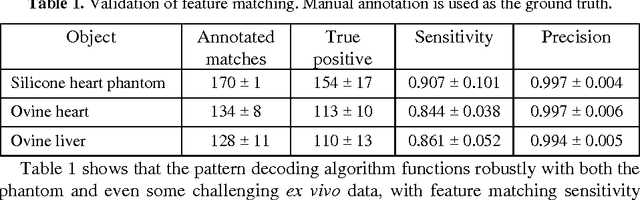
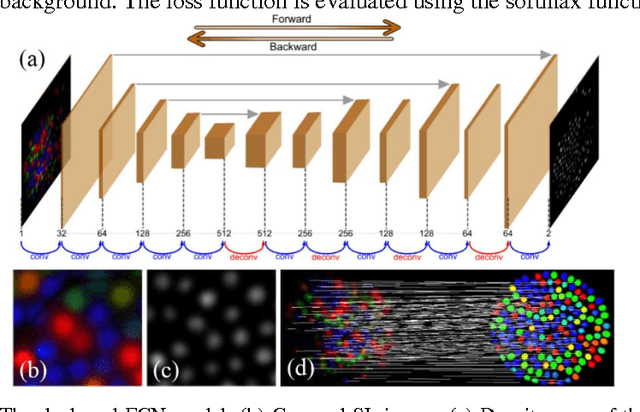
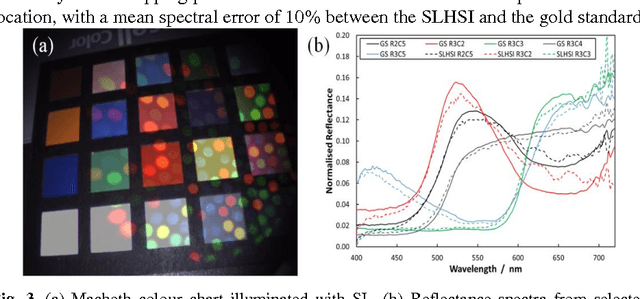
Tissue surface shape and reflectance spectra provide rich intra-operative information useful in surgical guidance. We propose a hybrid system which displays an endoscopic image with a fast joint inspection of tissue surface shape using structured light (SL) and hyperspectral imaging (HSI). For SL a miniature fibre probe is used to project a coloured spot pattern onto the tissue surface. In HSI mode standard endoscopic illumination is used, with the fibre probe collecting reflected light and encoding the spatial information into a linear format that can be imaged onto the slit of a spectrograph. Correspondence between the arrangement of fibres at the distal and proximal ends of the bundle was found using spectral encoding. Then during pattern decoding, a fully convolutional network (FCN) was used for spot detection, followed by a matching propagation algorithm for spot identification. This method enabled fast reconstruction (12 frames per second) using a GPU. The hyperspectral image was combined with the white light image and the reconstructed surface, showing the spectral information of different areas. Validation of this system using phantom and ex vivo experiments has been demonstrated.