 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvaluating Robotic Approach Techniques for the Insertion of a Straight Instrument into a Vitreoretinal Surgery Trocar
Jan 13, 2025

Advances in vitreoretinal robotic surgery enable precise techniques for gene therapies. This study evaluates three robotic approaches using the 7-DoF robotic arm for docking a micro-precise tool to a trocar: fully co-manipulated, hybrid co-manipulated/teleoperated, and hybrid with camera assistance. The fully co-manipulated approach was the fastest but had a 42% success rate. Hybrid methods showed higher success rates (91.6% and 100%) and completed tasks within 2 minutes. NASA Task Load Index (TLX) assessments indicated lower physical demand and effort for hybrid approaches.
Homography-based Visual Servoing with Remote Center of Motion for Semi-autonomous Robotic Endoscope Manipulation
Oct 25, 2021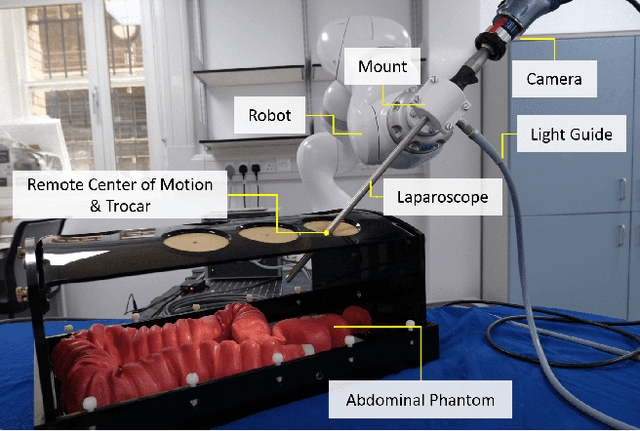
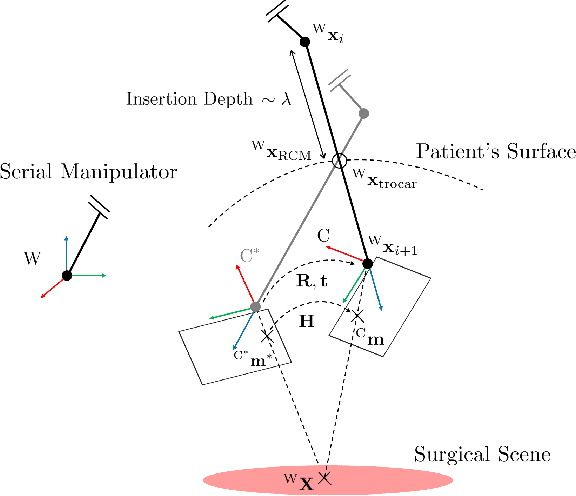
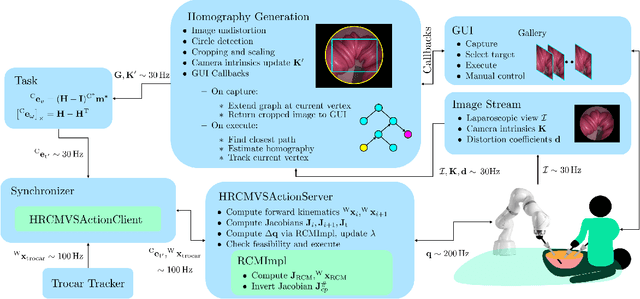
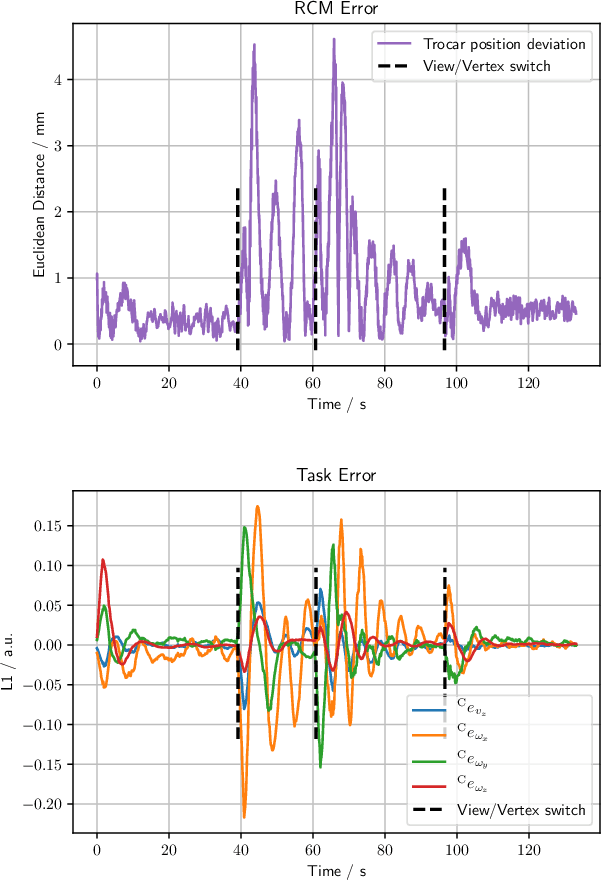
The dominant visual servoing approaches in Minimally Invasive Surgery (MIS) follow single points or adapt the endoscope's field of view based on the surgical tools' distance. These methods rely on point positions with respect to the camera frame to infer a control policy. Deviating from the dominant methods, we formulate a robotic controller that allows for image-based visual servoing that requires neither explicit tool and camera positions nor any explicit image depth information. The proposed method relies on homography-based image registration, which changes the automation paradigm from point-centric towards surgical-scene-centric approach. It simultaneously respects a programmable Remote Center of Motion (RCM). Our approach allows a surgeon to build a graph of desired views, from which, once built, views can be manually selected and automatically servoed to irrespective of robot-patient frame transformation changes. We evaluate our method on an abdominal phantom and provide an open source ROS Moveit integration for use with any serial manipulator.