 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWiCV@CVPR2024: The Thirteenth Women In Computer Vision Workshop at the Annual CVPR Conference
Nov 03, 2024In this paper, we present the details of Women in Computer Vision Workshop - WiCV 2024, organized alongside the CVPR 2024 in Seattle, Washington, United States. WiCV aims to amplify the voices of underrepresented women in the computer vision community, fostering increased visibility in both academia and industry. We believe that such events play a vital role in addressing gender imbalances within the field. The annual WiCV@CVPR workshop offers a)~opportunity for collaboration between researchers from minority groups, b) mentorship for female junior researchers, c) financial support to presenters to alleviate financial burdens and d)~a diverse array of role models who can inspire younger researchers at the outset of their careers. In this paper, we present a comprehensive report on the workshop program, historical trends from the past WiCV@CVPR events, and a summary of statistics related to presenters, attendees, and sponsorship for the WiCV 2024 workshop.
Device-Free Human State Estimation using UWB Multi-Static Radios
Dec 26, 2023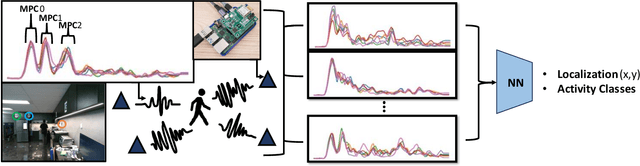

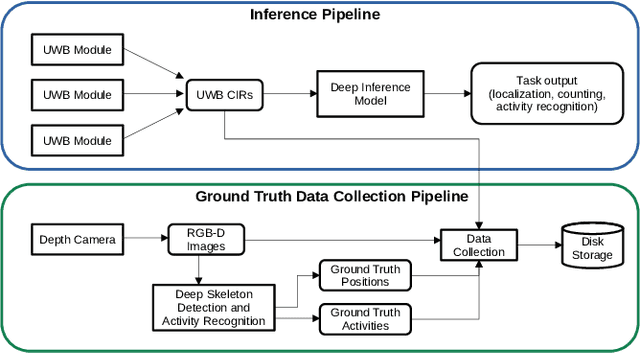
We present a human state estimation framework that allows us to estimate the location, and even the activities, of people in an indoor environment without the requirement that they carry a specific devices with them. To achieve this "device free" localization we use a small number of low-cost Ultra-Wide Band (UWB) sensors distributed across the environment of interest. To achieve high quality estimation from the UWB signals merely reflected of people in the environment, we exploit a deep network that can learn to make inferences. The hardware setup consists of commercial off-the-shelf (COTS) single antenna UWB modules for sensing, paired with Raspberry PI units for computational processing and data transfer. We make use of the channel impulse response (CIR) measurements from the UWB sensors to estimate the human state - comprised of location and activity - in a given area. Additionally, we can also estimate the number of humans that occupy this region of interest. In our approach, first, we pre-process the CIR data which involves meticulous aggregation of measurements and extraction of key statistics. Afterwards, we leverage a convolutional deep neural network to map the CIRs into precise location estimates with sub-30 cm accuracy. Similarly, we achieve accurate human activity recognition and occupancy counting results. We show that we can quickly fine-tune our model for new out-of-distribution users, a process that requires only a few minutes of data and a few epochs of training. Our results show that UWB is a promising solution for adaptable smart-home localization and activity recognition problems.
PEOPLEx: PEdestrian Opportunistic Positioning LEveraging IMU, UWB, BLE and WiFi
Nov 30, 2023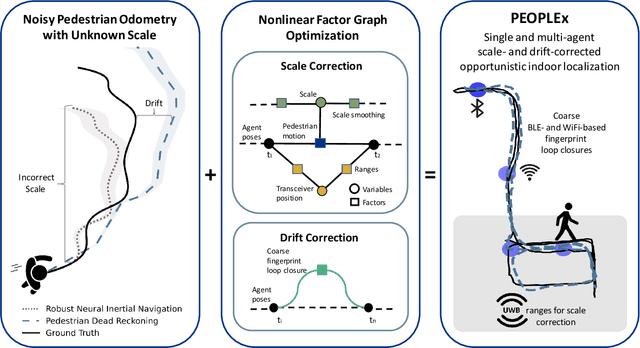
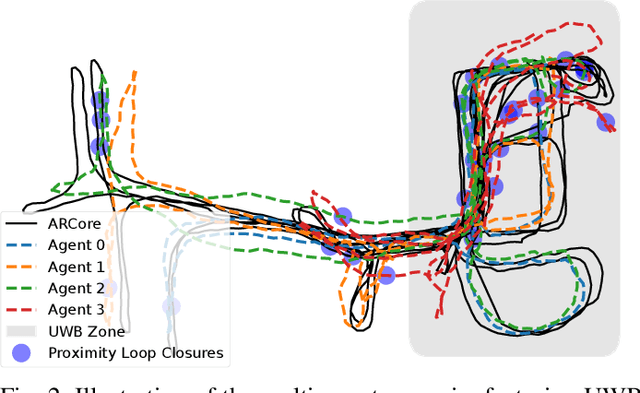
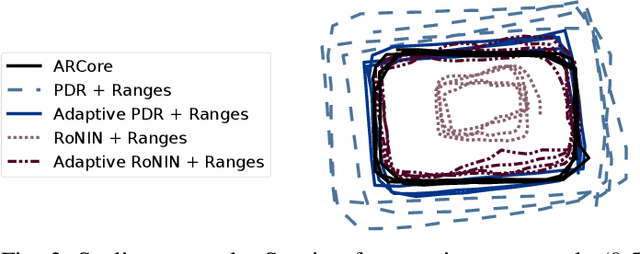
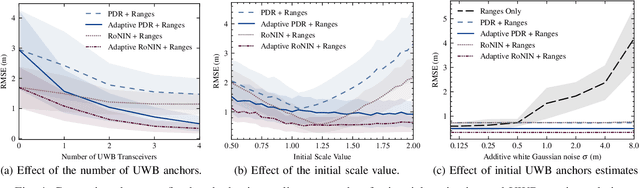
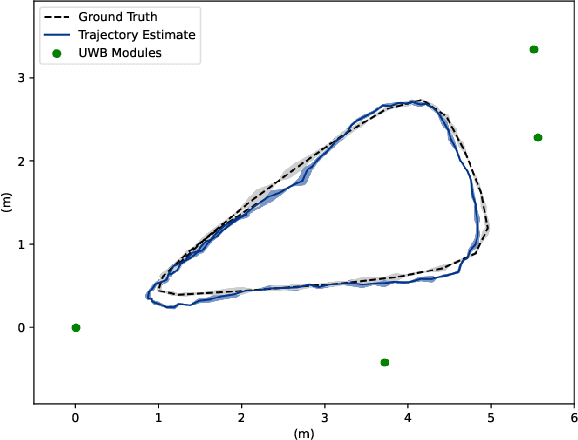
This paper advances the field of pedestrian localization by introducing a unifying framework for opportunistic positioning based on nonlinear factor graph optimization. While many existing approaches assume constant availability of one or multiple sensing signals, our methodology employs IMU-based pedestrian inertial navigation as the backbone for sensor fusion, opportunistically integrating Ultra-Wideband (UWB), Bluetooth Low Energy (BLE), and WiFi signals when they are available in the environment. The proposed PEOPLEx framework is designed to incorporate sensing data as it becomes available, operating without any prior knowledge about the environment (e.g. anchor locations, radio frequency maps, etc.). Our contributions are twofold: 1) we introduce an opportunistic multi-sensor and real-time pedestrian positioning framework fusing the available sensor measurements; 2) we develop novel factors for adaptive scaling and coarse loop closures, significantly improving the precision of indoor positioning. Experimental validation confirms that our approach achieves accurate localization estimates in real indoor scenarios using commercial smartphones.
WiCV@CVPR2023: The Eleventh Women In Computer Vision Workshop at the Annual CVPR Conference
Sep 22, 2023In this paper, we present the details of Women in Computer Vision Workshop - WiCV 2023, organized alongside the hybrid CVPR 2023 in Vancouver, Canada. WiCV aims to amplify the voices of underrepresented women in the computer vision community, fostering increased visibility in both academia and industry. We believe that such events play a vital role in addressing gender imbalances within the field. The annual WiCV@CVPR workshop offers a) opportunity for collaboration between researchers from minority groups, b) mentorship for female junior researchers, c) financial support to presenters to alleviate finanacial burdens and d) a diverse array of role models who can inspire younger researchers at the outset of their careers. In this paper, we present a comprehensive report on the workshop program, historical trends from the past WiCV@CVPR events, and a summary of statistics related to presenters, attendees, and sponsorship for the WiCV 2023 workshop.
Neural Inertial Localization
Mar 29, 2022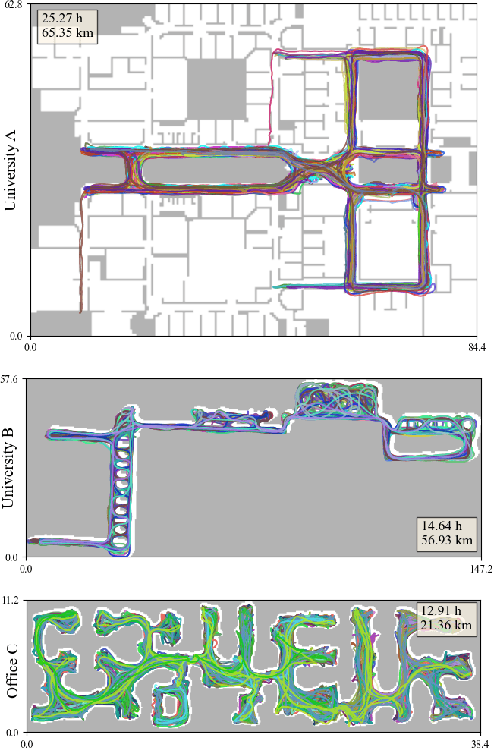
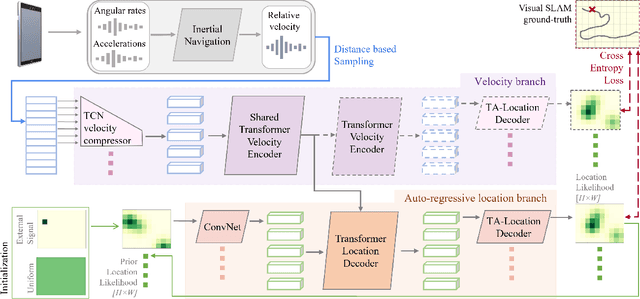
This paper proposes the inertial localization problem, the task of estimating the absolute location from a sequence of inertial sensor measurements. This is an exciting and unexplored area of indoor localization research, where we present a rich dataset with 53 hours of inertial sensor data and the associated ground truth locations. We developed a solution, dubbed neural inertial localization (NILoc) which 1) uses a neural inertial navigation technique to turn inertial sensor history to a sequence of velocity vectors; then 2) employs a transformer-based neural architecture to find the device location from the sequence of velocities. We only use an IMU sensor, which is energy efficient and privacy preserving compared to WiFi, cameras, and other data sources. Our approach is significantly faster and achieves competitive results even compared with state-of-the-art methods that require a floorplan and run 20 to 30 times slower. We share our code, model and data at https://sachini.github.io/niloc.
Fusion-DHL: WiFi, IMU, and Floorplan Fusion for Dense History of Locations in Indoor Environments
May 18, 2021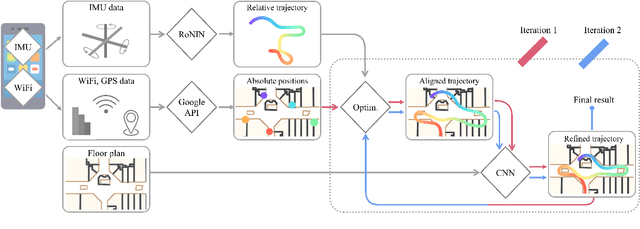
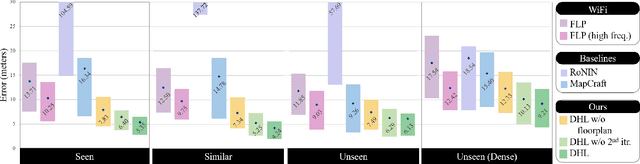
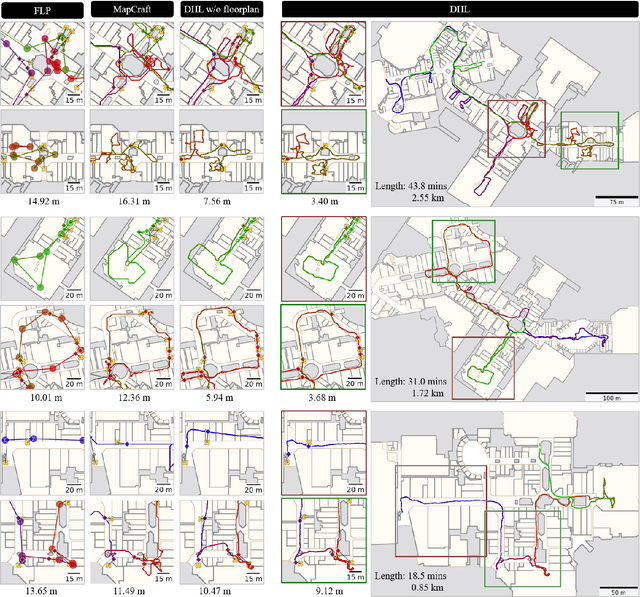
The paper proposes a multi-modal sensor fusion algorithm that fuses WiFi, IMU, and floorplan information to infer an accurate and dense location history in indoor environments. The algorithm uses 1) an inertial navigation algorithm to estimate a relative motion trajectory from IMU sensor data; 2) a WiFi-based localization API in industry to obtain positional constraints and geo-localize the trajectory; and 3) a convolutional neural network to refine the location history to be consistent with the floorplan. We have developed a data acquisition app to build a new dataset with WiFi, IMU, and floorplan data with ground-truth positions at 4 university buildings and 3 shopping malls. Our qualitative and quantitative evaluations demonstrate that the proposed system is able to produce twice as accurate and a few orders of magnitude denser location history than the current standard, while requiring minimal additional energy consumption. We will publicly share our code, data and models.
* To be published in ICRA 2021. Code and data: https://github.com/Sachini/Fusion-DHL
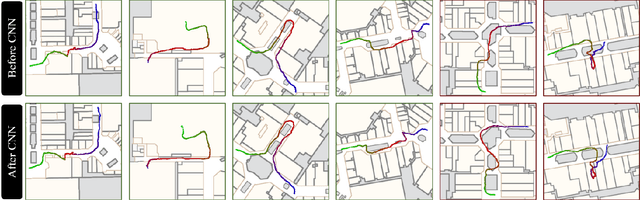
RoNIN: Robust Neural Inertial Navigation in the Wild: Benchmark, Evaluations, and New Methods
May 30, 2019
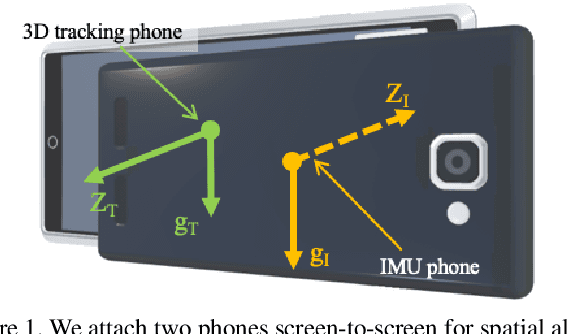

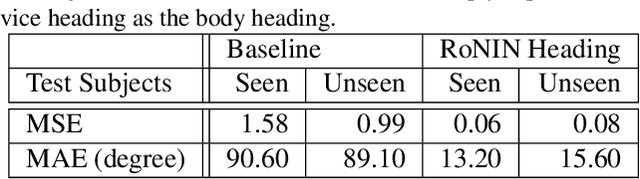
This paper sets a new foundation for data-driven inertial navigation research, where the task is the estimation of positions and orientations of a moving subject from a sequence of IMU sensor measurements. More concretely, the paper presents 1) a new benchmark containing more than 40 hours of IMU sensor data from 100 human subjects with ground-truth 3D trajectories under natural human motions; 2) novel neural inertial navigation architectures, making significant improvements for challenging motion cases; and 3) qualitative and quantitative evaluations of the competing methods over three inertial navigation benchmarks. We will share the code and data to promote further research.