 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePEOPLEx: PEdestrian Opportunistic Positioning LEveraging IMU, UWB, BLE and WiFi
Nov 30, 2023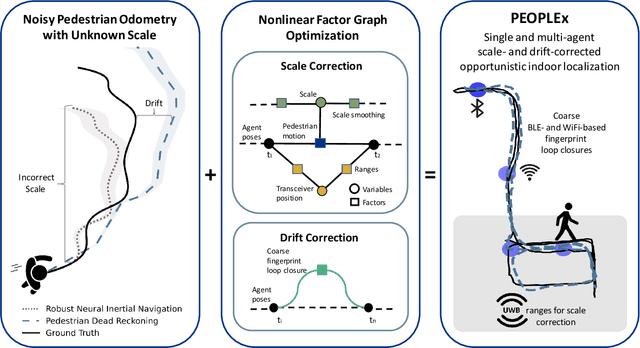
This paper advances the field of pedestrian localization by introducing a unifying framework for opportunistic positioning based on nonlinear factor graph optimization. While many existing approaches assume constant availability of one or multiple sensing signals, our methodology employs IMU-based pedestrian inertial navigation as the backbone for sensor fusion, opportunistically integrating Ultra-Wideband (UWB), Bluetooth Low Energy (BLE), and WiFi signals when they are available in the environment. The proposed PEOPLEx framework is designed to incorporate sensing data as it becomes available, operating without any prior knowledge about the environment (e.g. anchor locations, radio frequency maps, etc.). Our contributions are twofold: 1) we introduce an opportunistic multi-sensor and real-time pedestrian positioning framework fusing the available sensor measurements; 2) we develop novel factors for adaptive scaling and coarse loop closures, significantly improving the precision of indoor positioning. Experimental validation confirms that our approach achieves accurate localization estimates in real indoor scenarios using commercial smartphones.