 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Empirical Evaluation of Four Off-the-Shelf Proprietary Visual-Inertial Odometry Systems
Jul 14, 2022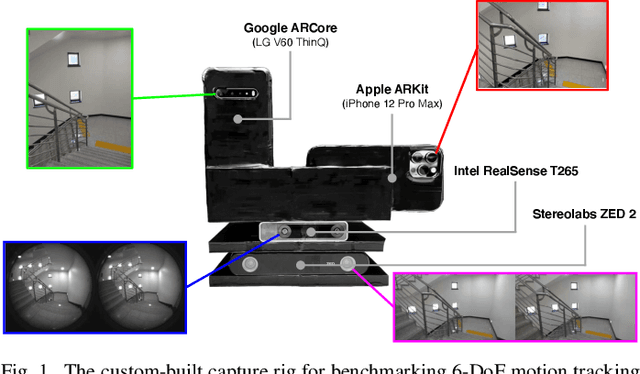
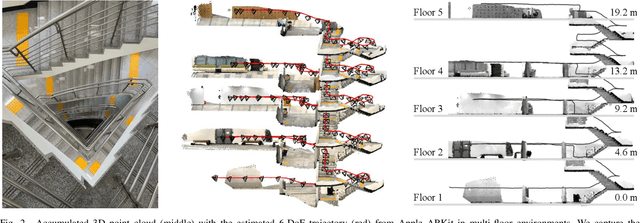

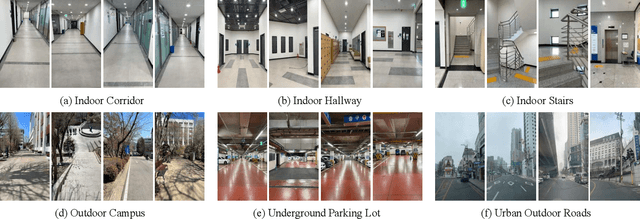
Commercial visual-inertial odometry (VIO) systems have been gaining attention as cost-effective, off-the-shelf six degrees of freedom (6-DoF) ego-motion tracking methods for estimating accurate and consistent camera pose data, in addition to their ability to operate without external localization from motion capture or global positioning systems. It is unclear from existing results, however, which commercial VIO platforms are the most stable, consistent, and accurate in terms of state estimation for indoor and outdoor robotic applications. We assess four popular proprietary VIO systems (Apple ARKit, Google ARCore, Intel RealSense T265, and Stereolabs ZED 2) through a series of both indoor and outdoor experiments where we show their positioning stability, consistency, and accuracy. We present our complete results as a benchmark comparison for the research community.
Fusion-DHL: WiFi, IMU, and Floorplan Fusion for Dense History of Locations in Indoor Environments
May 18, 2021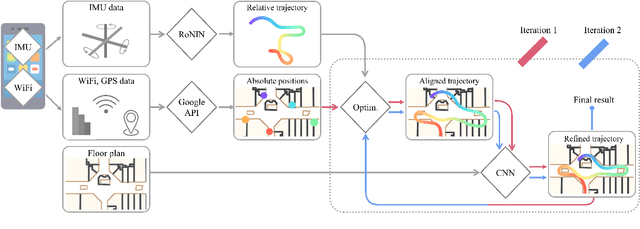
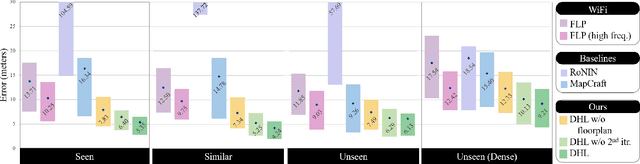
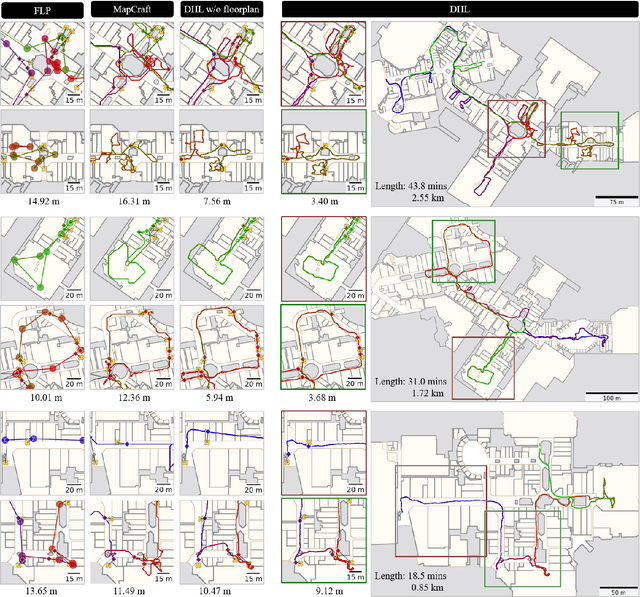
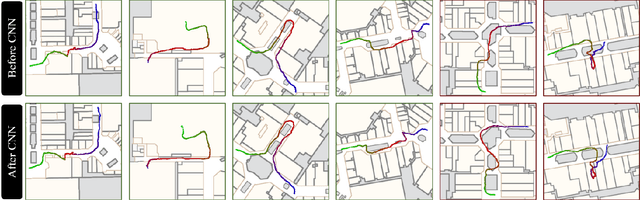
The paper proposes a multi-modal sensor fusion algorithm that fuses WiFi, IMU, and floorplan information to infer an accurate and dense location history in indoor environments. The algorithm uses 1) an inertial navigation algorithm to estimate a relative motion trajectory from IMU sensor data; 2) a WiFi-based localization API in industry to obtain positional constraints and geo-localize the trajectory; and 3) a convolutional neural network to refine the location history to be consistent with the floorplan. We have developed a data acquisition app to build a new dataset with WiFi, IMU, and floorplan data with ground-truth positions at 4 university buildings and 3 shopping malls. Our qualitative and quantitative evaluations demonstrate that the proposed system is able to produce twice as accurate and a few orders of magnitude denser location history than the current standard, while requiring minimal additional energy consumption. We will publicly share our code, data and models.
* To be published in ICRA 2021. Code and data: https://github.com/Sachini/Fusion-DHL
Moving object detection for visual odometry in a dynamic environment based on occlusion accumulation
Sep 18, 2020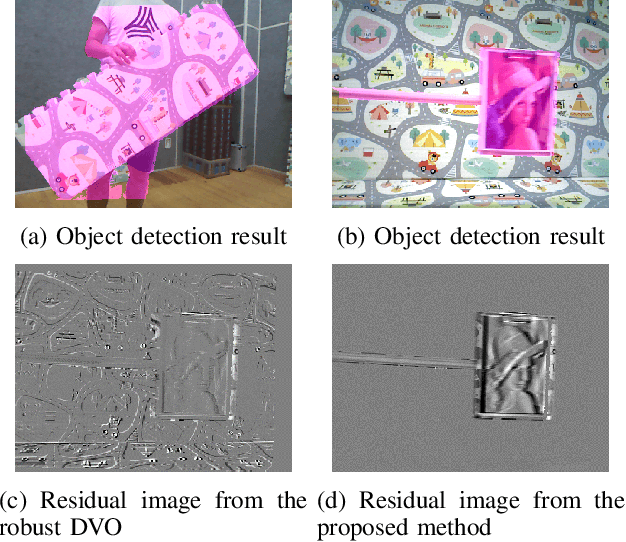
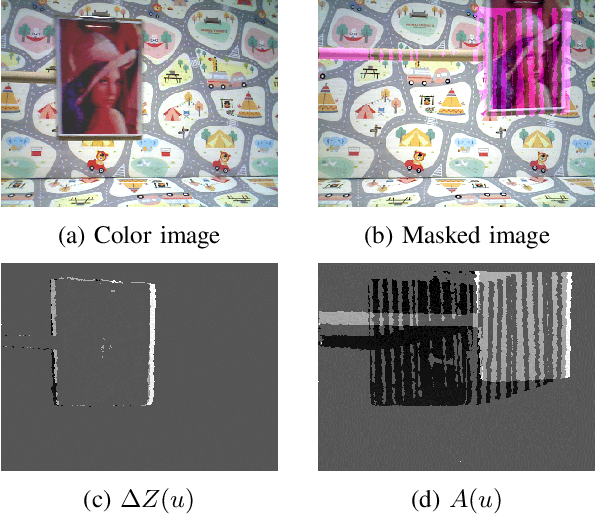
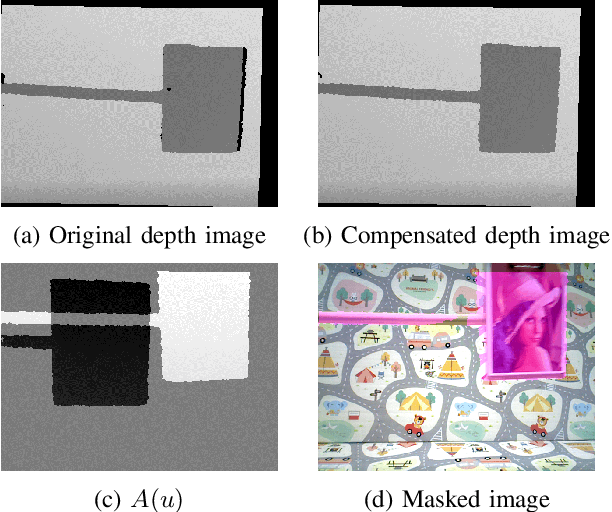

Detection of moving objects is an essential capability in dealing with dynamic environments. Most moving object detection algorithms have been designed for color images without depth. For robotic navigation where real-time RGB-D data is often readily available, utilization of the depth information would be beneficial for obstacle recognition. Here, we propose a simple moving object detection algorithm that uses RGB-D images. The proposed algorithm does not require estimating a background model. Instead, it uses an occlusion model which enables us to estimate the camera pose on a background confused with moving objects that dominate the scene. The proposed algorithm allows to separate the moving object detection and visual odometry (VO) so that an arbitrary robust VO method can be employed in a dynamic situation with a combination of moving object detection, whereas other VO algorithms for a dynamic environment are inseparable. In this paper, we use dense visual odometry (DVO) as a VO method with a bi-square regression weight. Experimental results show the segmentation accuracy and the performance improvement of DVO in the situations. We validate our algorithm in public datasets and our dataset which also publicly accessible.
* 7 pages