 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMoving object detection for visual odometry in a dynamic environment based on occlusion accumulation
Sep 18, 2020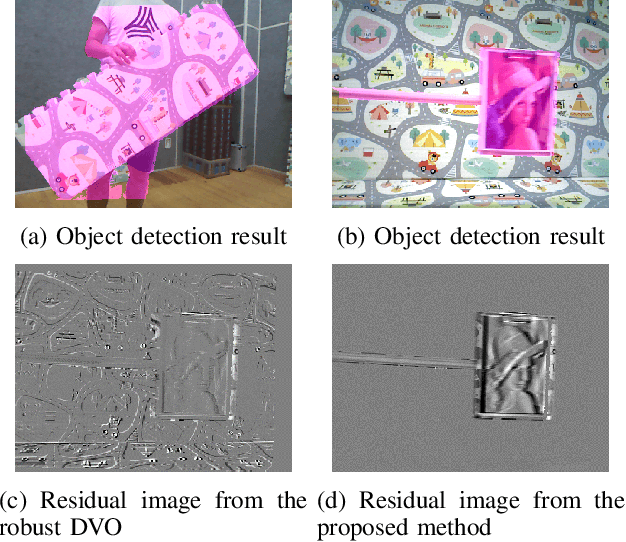
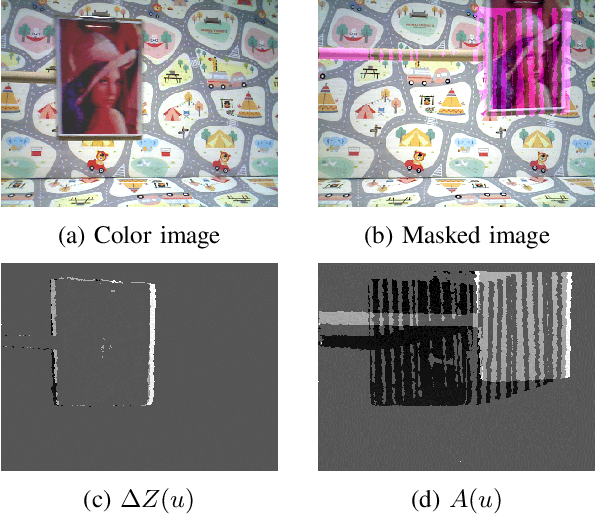
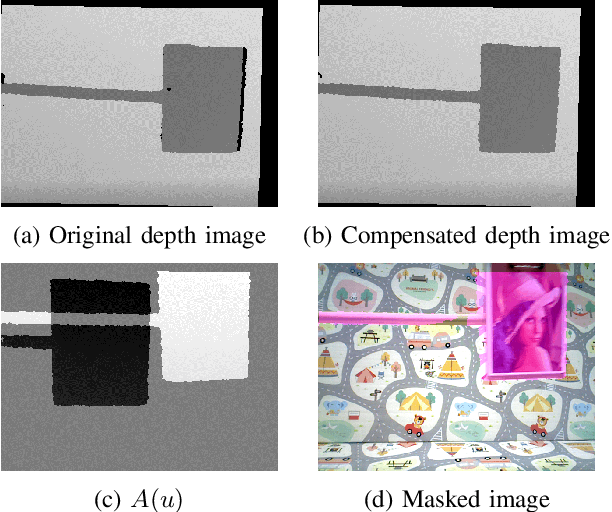

Detection of moving objects is an essential capability in dealing with dynamic environments. Most moving object detection algorithms have been designed for color images without depth. For robotic navigation where real-time RGB-D data is often readily available, utilization of the depth information would be beneficial for obstacle recognition. Here, we propose a simple moving object detection algorithm that uses RGB-D images. The proposed algorithm does not require estimating a background model. Instead, it uses an occlusion model which enables us to estimate the camera pose on a background confused with moving objects that dominate the scene. The proposed algorithm allows to separate the moving object detection and visual odometry (VO) so that an arbitrary robust VO method can be employed in a dynamic situation with a combination of moving object detection, whereas other VO algorithms for a dynamic environment are inseparable. In this paper, we use dense visual odometry (DVO) as a VO method with a bi-square regression weight. Experimental results show the segmentation accuracy and the performance improvement of DVO in the situations. We validate our algorithm in public datasets and our dataset which also publicly accessible.
* 7 pages
Edge Detection for Event Cameras using Intra-pixel-area Events
Jul 17, 2019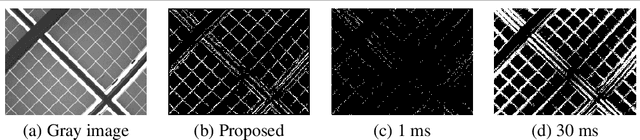
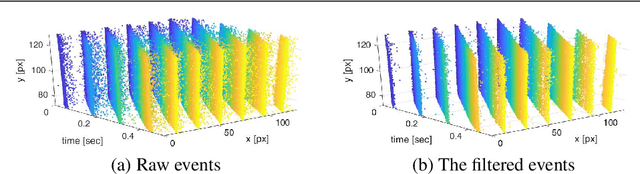
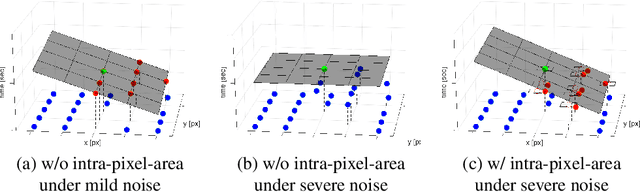
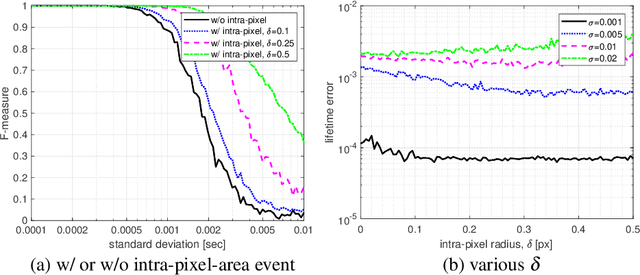
In this work, we propose an edge detection algorithm by estimating a lifetime of an event produced from dynamic vision sensor (DVS), also known as event camera. The event camera, unlike traditional CMOS camera, generates sparse event data at a pixel whose log-intensity changes. Due to this characteristic, theoretically, there is only one or no event at the specific time, which makes it difficult to grasp the world captured by the camera at a particular moment. In this work, we present an algorithm that keeps the event alive until the corresponding event is generated in a nearby pixel so that the shape of an edge is preserved. Particularly, we consider a pixel area to fit a plane on Surface of Active Events (SAE) and call the point inside the pixel area closest to the plane as a intra-pixel-area event. These intra-pixel-area events help the fitting plane algorithm to estimate life time robustly and precisely. Our algorithm performs better in terms of sharpness and similarity metric than the accumulation of events over fixed counts or time intervals, when compared with the existing edge detection algorithms, both qualitatively and quantitatively.