 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Real-time RGB-D Visual Odometry in Dynamic Environments via Rigid Motion Model
Jul 19, 2019

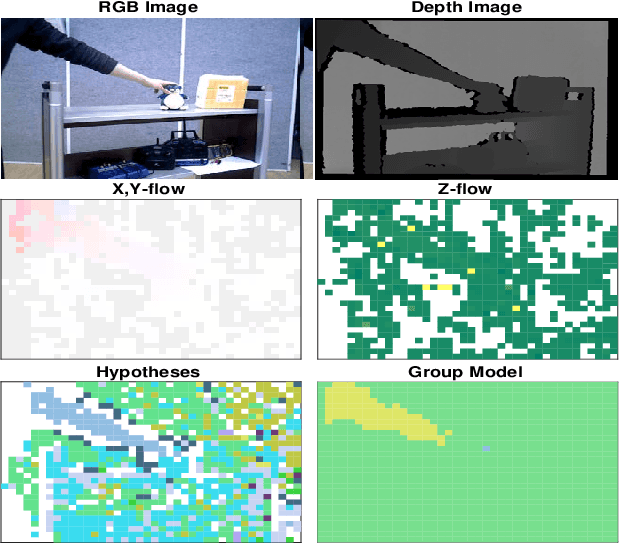

In the paper, we propose a robust real-time visual odometry in dynamic environments via rigid-motion model updated by scene flow. The proposed algorithm consists of spatial motion segmentation and temporal motion tracking. The spatial segmentation first generates several motion hypotheses by using a grid-based scene flow and clusters the extracted motion hypotheses, separating objects that move independently of one another. Further, we use a dual-mode motion model to consistently distinguish between the static and dynamic parts in the temporal motion tracking stage. Finally, the proposed algorithm estimates the pose of a camera by taking advantage of the region classified as static parts. In order to evaluate the performance of visual odometry under the existence of dynamic rigid objects, we use self-collected dataset containing RGB-D images and motion capture data for ground-truth. We compare our algorithm with state-of-the-art visual odometry algorithms. The validation results suggest that the proposed algorithm can estimate the pose of a camera robustly and accurately in dynamic environments.
Edge Detection for Event Cameras using Intra-pixel-area Events
Jul 17, 2019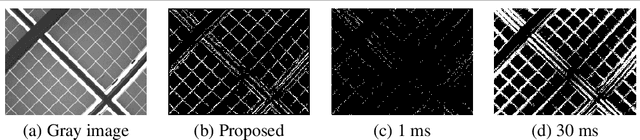
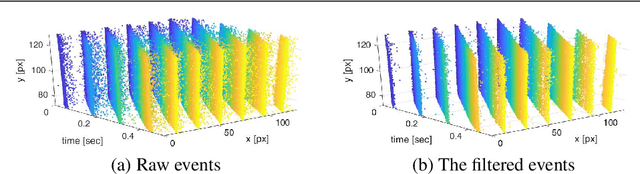
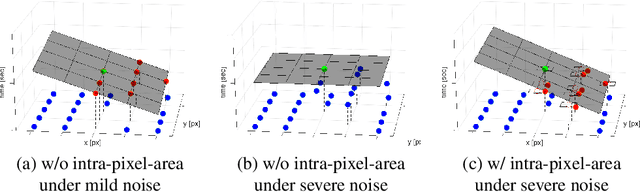
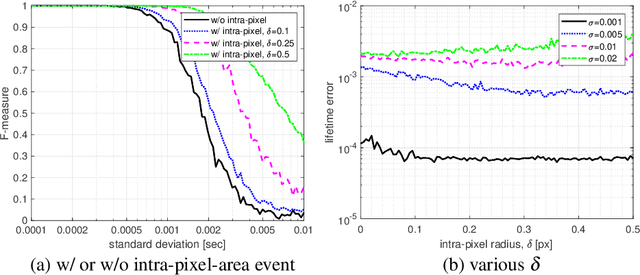
In this work, we propose an edge detection algorithm by estimating a lifetime of an event produced from dynamic vision sensor (DVS), also known as event camera. The event camera, unlike traditional CMOS camera, generates sparse event data at a pixel whose log-intensity changes. Due to this characteristic, theoretically, there is only one or no event at the specific time, which makes it difficult to grasp the world captured by the camera at a particular moment. In this work, we present an algorithm that keeps the event alive until the corresponding event is generated in a nearby pixel so that the shape of an edge is preserved. Particularly, we consider a pixel area to fit a plane on Surface of Active Events (SAE) and call the point inside the pixel area closest to the plane as a intra-pixel-area event. These intra-pixel-area events help the fitting plane algorithm to estimate life time robustly and precisely. Our algorithm performs better in terms of sharpness and similarity metric than the accumulation of events over fixed counts or time intervals, when compared with the existing edge detection algorithms, both qualitatively and quantitatively.