 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolySim: Bridging the Sim-to-Real Gap for Humanoid Control via Multi-Simulator Dynamics Randomization
Oct 02, 2025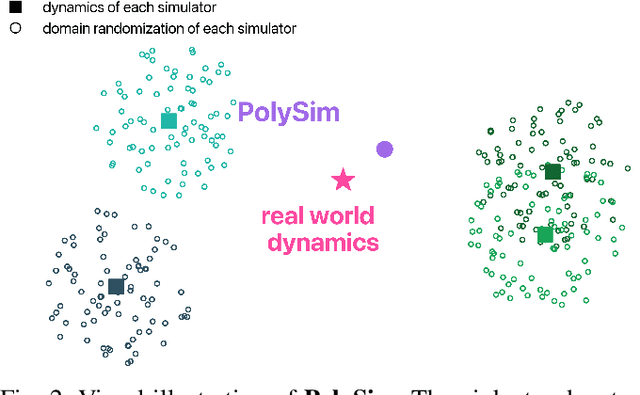
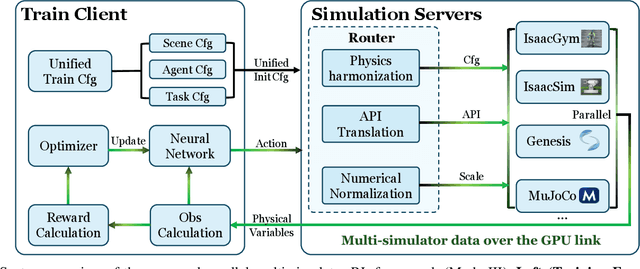
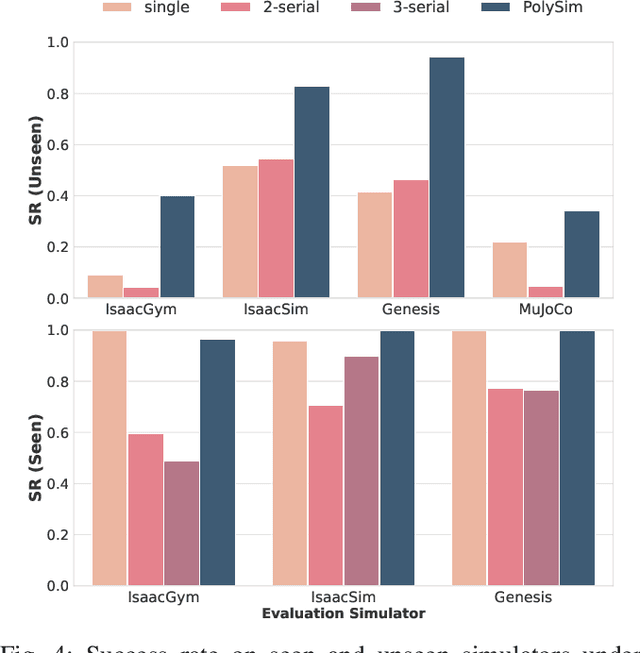
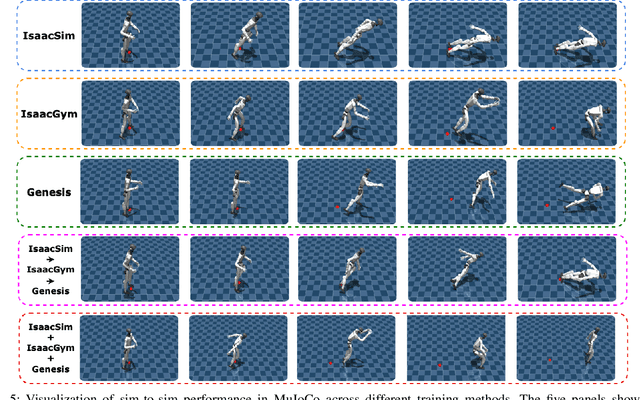
Humanoid whole-body control (WBC) policies trained in simulation often suffer from the sim-to-real gap, which fundamentally arises from simulator inductive bias, the inherent assumptions and limitations of any single simulator. These biases lead to nontrivial discrepancies both across simulators and between simulation and the real world. To mitigate the effect of simulator inductive bias, the key idea is to train policies jointly across multiple simulators, encouraging the learned controller to capture dynamics that generalize beyond any single simulator's assumptions. We thus introduce PolySim, a WBC training platform that integrates multiple heterogeneous simulators. PolySim can launch parallel environments from different engines simultaneously within a single training run, thereby realizing dynamics-level domain randomization. Theoretically, we show that PolySim yields a tighter upper bound on simulator inductive bias than single-simulator training. In experiments, PolySim substantially reduces motion-tracking error in sim-to-sim evaluations; for example, on MuJoCo, it improves execution success by 52.8 over an IsaacSim baseline. PolySim further enables zero-shot deployment on a real Unitree G1 without additional fine-tuning, showing effective transfer from simulation to the real world. We will release the PolySim code upon acceptance of this work.
MCCD: Multi-Agent Collaboration-based Compositional Diffusion for Complex Text-to-Image Generation
May 05, 2025Diffusion models have shown excellent performance in text-to-image generation. Nevertheless, existing methods often suffer from performance bottlenecks when handling complex prompts that involve multiple objects, characteristics, and relations. Therefore, we propose a Multi-agent Collaboration-based Compositional Diffusion (MCCD) for text-to-image generation for complex scenes. Specifically, we design a multi-agent collaboration-based scene parsing module that generates an agent system comprising multiple agents with distinct tasks, utilizing MLLMs to extract various scene elements effectively. In addition, Hierarchical Compositional diffusion utilizes a Gaussian mask and filtering to refine bounding box regions and enhance objects through region enhancement, resulting in the accurate and high-fidelity generation of complex scenes. Comprehensive experiments demonstrate that our MCCD significantly improves the performance of the baseline models in a training-free manner, providing a substantial advantage in complex scene generation.
ChatBEV: A Visual Language Model that Understands BEV Maps
Mar 21, 2025Traffic scene understanding is essential for intelligent transportation systems and autonomous driving, ensuring safe and efficient vehicle operation. While recent advancements in VLMs have shown promise for holistic scene understanding, the application of VLMs to traffic scenarios, particularly using BEV maps, remains under explored. Existing methods often suffer from limited task design and narrow data amount, hindering comprehensive scene understanding. To address these challenges, we introduce ChatBEV-QA, a novel BEV VQA benchmark contains over 137k questions, designed to encompass a wide range of scene understanding tasks, including global scene understanding, vehicle-lane interactions, and vehicle-vehicle interactions. This benchmark is constructed using an novel data collection pipeline that generates scalable and informative VQA data for BEV maps. We further fine-tune a specialized vision-language model ChatBEV, enabling it to interpret diverse question prompts and extract relevant context-aware information from BEV maps. Additionally, we propose a language-driven traffic scene generation pipeline, where ChatBEV facilitates map understanding and text-aligned navigation guidance, significantly enhancing the generation of realistic and consistent traffic scenarios. The dataset, code and the fine-tuned model will be released.
Toward Robust Incomplete Multimodal Sentiment Analysis via Hierarchical Representation Learning
Nov 05, 2024



Multimodal Sentiment Analysis (MSA) is an important research area that aims to understand and recognize human sentiment through multiple modalities. The complementary information provided by multimodal fusion promotes better sentiment analysis compared to utilizing only a single modality. Nevertheless, in real-world applications, many unavoidable factors may lead to situations of uncertain modality missing, thus hindering the effectiveness of multimodal modeling and degrading the model's performance. To this end, we propose a Hierarchical Representation Learning Framework (HRLF) for the MSA task under uncertain missing modalities. Specifically, we propose a fine-grained representation factorization module that sufficiently extracts valuable sentiment information by factorizing modality into sentiment-relevant and modality-specific representations through crossmodal translation and sentiment semantic reconstruction. Moreover, a hierarchical mutual information maximization mechanism is introduced to incrementally maximize the mutual information between multi-scale representations to align and reconstruct the high-level semantics in the representations. Ultimately, we propose a hierarchical adversarial learning mechanism that further aligns and adapts the latent distribution of sentiment-relevant representations to produce robust joint multimodal representations. Comprehensive experiments on three datasets demonstrate that HRLF significantly improves MSA performance under uncertain modality missing cases.
MedAide: Towards an Omni Medical Aide via Specialized LLM-based Multi-Agent Collaboration
Oct 17, 2024

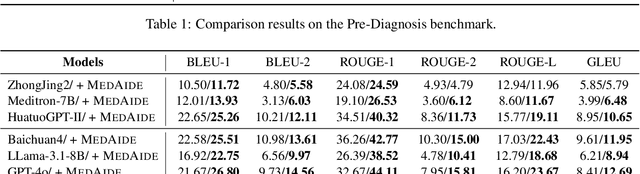

Large Language Model (LLM)-driven interactive systems currently show potential promise in healthcare domains. Despite their remarkable capabilities, LLMs typically lack personalized recommendations and diagnosis analysis in sophisticated medical applications, causing hallucinations and performance bottlenecks. To address these challenges, this paper proposes MedAide, an LLM-based omni medical multi-agent collaboration framework for specialized healthcare services. Specifically, MedAide first performs query rewriting through retrieval-augmented generation to accomplish accurate medical intent understanding. Immediately, we devise a contextual encoder to obtain intent prototype embeddings, which are used to recognize fine-grained intents by similarity matching. According to the intent relevance, the activated agents collaborate effectively to provide integrated decision analysis. Extensive experiments are conducted on four medical benchmarks with composite intents. Experimental results from automated metrics and expert doctor evaluations show that MedAide outperforms current LLMs and improves their medical proficiency and strategic reasoning.
PediatricsGPT: Large Language Models as Chinese Medical Assistants for Pediatric Applications
May 29, 2024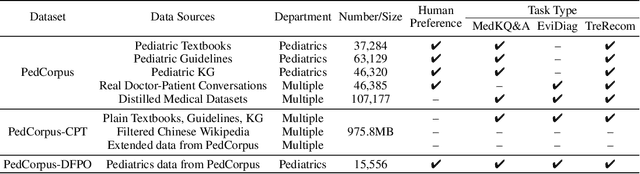
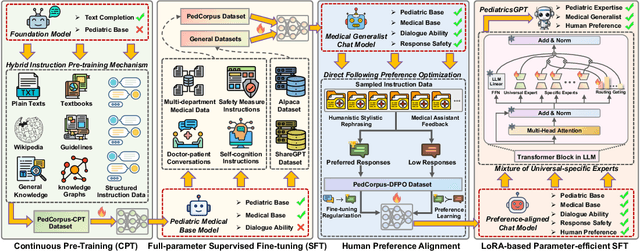
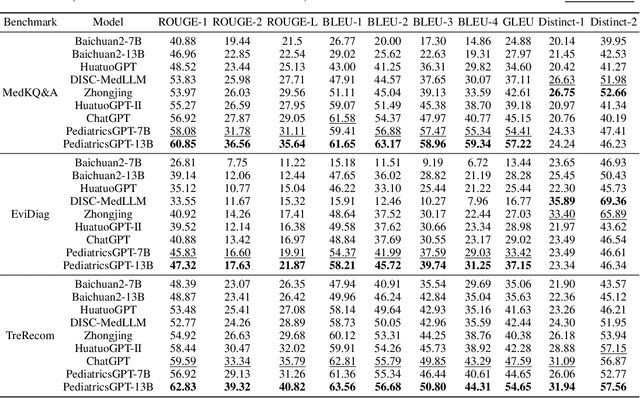
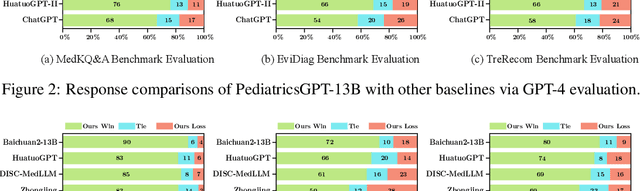
Developing intelligent pediatric consultation systems offers promising prospects for improving diagnostic efficiency, especially in China, where healthcare resources are scarce. Despite recent advances in Large Language Models (LLMs) for Chinese medicine, their performance is sub-optimal in pediatric applications due to inadequate instruction data and vulnerable training procedures. To address the above issues, this paper builds PedCorpus, a high-quality dataset of over 300,000 multi-task instructions from pediatric textbooks, guidelines, and knowledge graph resources to fulfil diverse diagnostic demands. Upon well-designed PedCorpus, we propose PediatricsGPT, the first Chinese pediatric LLM assistant built on a systematic and robust training pipeline. In the continuous pre-training phase, we introduce a hybrid instruction pre-training mechanism to mitigate the internal-injected knowledge inconsistency of LLMs for medical domain adaptation. Immediately, the full-parameter Supervised Fine-Tuning (SFT) is utilized to incorporate the general medical knowledge schema into the models. After that, we devise a direct following preference optimization to enhance the generation of pediatrician-like humanistic responses. In the parameter-efficient secondary SFT phase, a mixture of universal-specific experts strategy is presented to resolve the competency conflict between medical generalist and pediatric expertise mastery. Extensive results based on the metrics, GPT-4, and doctor evaluations on distinct doctor downstream tasks show that PediatricsGPT consistently outperforms previous Chinese medical LLMs. Our model and dataset will be open-source for community development.
Language-Driven Interactive Traffic Trajectory Generation
May 24, 2024
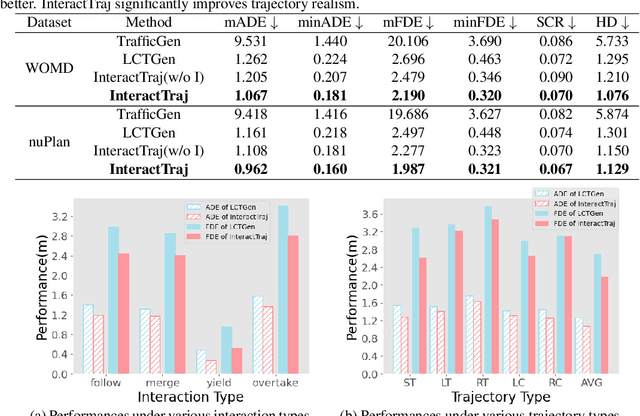

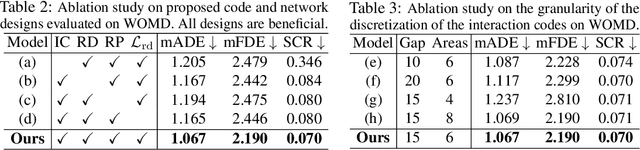
Realistic trajectory generation with natural language control is pivotal for advancing autonomous vehicle technology. However, previous methods focus on individual traffic participant trajectory generation, thus failing to account for the complexity of interactive traffic dynamics. In this work, we propose InteractTraj, the first language-driven traffic trajectory generator that can generate interactive traffic trajectories. InteractTraj interprets abstract trajectory descriptions into concrete formatted interaction-aware numerical codes and learns a mapping between these formatted codes and the final interactive trajectories. To interpret language descriptions, we propose a language-to-code encoder with a novel interaction-aware encoding strategy. To produce interactive traffic trajectories, we propose a code-to-trajectory decoder with interaction-aware feature aggregation that synergizes vehicle interactions with the environmental map and the vehicle moves. Extensive experiments show our method demonstrates superior performance over previous SoTA methods, offering a more realistic generation of interactive traffic trajectories with high controllability via diverse natural language commands. Our code is available at https://github.com/X1a-jk/InteractTraj.git
Joint-Relation Transformer for Multi-Person Motion Prediction
Aug 09, 2023



Multi-person motion prediction is a challenging problem due to the dependency of motion on both individual past movements and interactions with other people. Transformer-based methods have shown promising results on this task, but they miss the explicit relation representation between joints, such as skeleton structure and pairwise distance, which is crucial for accurate interaction modeling. In this paper, we propose the Joint-Relation Transformer, which utilizes relation information to enhance interaction modeling and improve future motion prediction. Our relation information contains the relative distance and the intra-/inter-person physical constraints. To fuse relation and joint information, we design a novel joint-relation fusion layer with relation-aware attention to update both features. Additionally, we supervise the relation information by forecasting future distance. Experiments show that our method achieves a 13.4% improvement of 900ms VIM on 3DPW-SoMoF/RC and 17.8%/12.0% improvement of 3s MPJPE on CMU-Mpcap/MuPoTS-3D dataset.
Hierarchical Opacity Propagation for Image Matting
Apr 07, 2020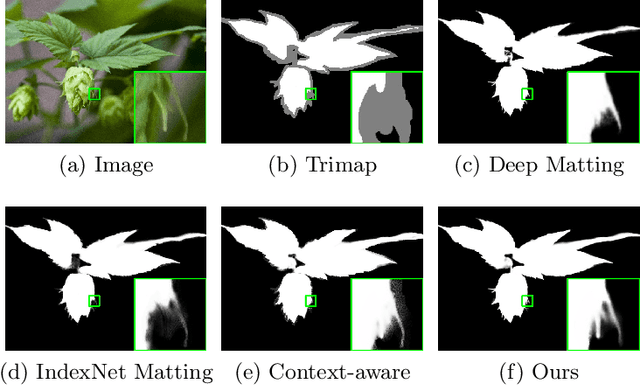
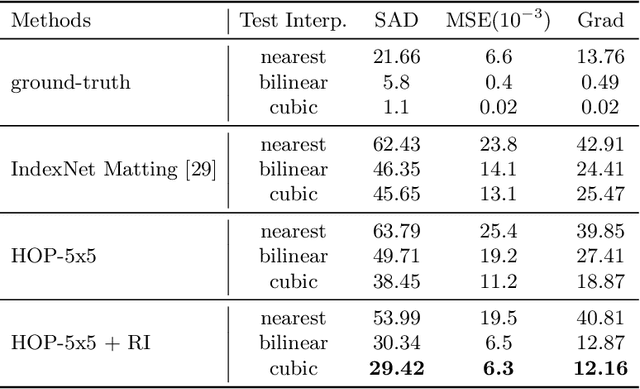
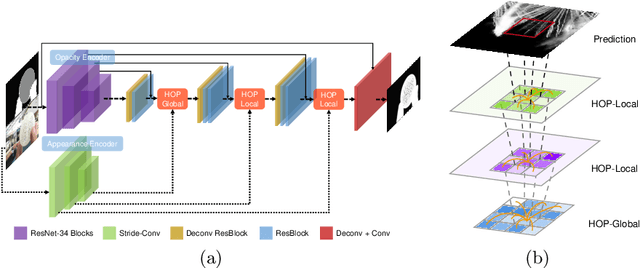
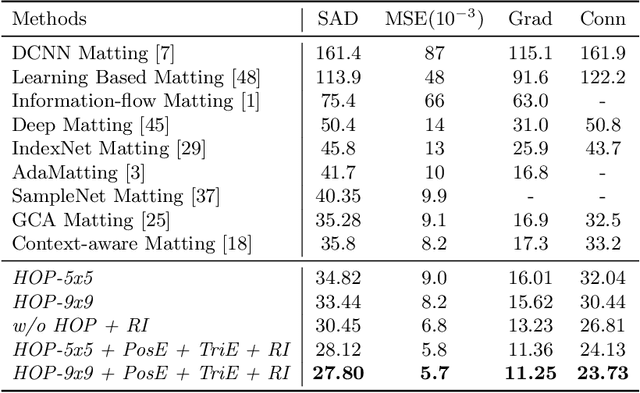
Natural image matting is a fundamental problem in computational photography and computer vision. Deep neural networks have seen the surge of successful methods in natural image matting in recent years. In contrast to traditional propagation-based matting methods, some top-tier deep image matting approaches tend to perform propagation in the neural network implicitly. A novel structure for more direct alpha matte propagation between pixels is in demand. To this end, this paper presents a hierarchical opacity propagation (HOP) matting method, where the opacity information is propagated in the neighborhood of each point at different semantic levels. The hierarchical structure is based on one global and multiple local propagation blocks. With the HOP structure, every feature point pair in high-resolution feature maps will be connected based on the appearance of input image. We further propose a scale-insensitive positional encoding tailored for image matting to deal with the unfixed size of input image and introduce the random interpolation augmentation into image matting. Extensive experiments and ablation study show that HOP matting is capable of outperforming state-of-the-art matting methods.