 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboWM-Bench: A Benchmark for Evaluating World Models in Robotic Manipulation
Apr 21, 2026Recent advances in large-scale video world models have enabled increasingly realistic future prediction, raising the prospect of leveraging imagined videos for robot learning. However, visual realism does not imply physical plausibility, and behaviors inferred from generated videos may violate dynamics and fail when executed by embodied agents. Existing benchmarks begin to incorporate notions of physical plausibility, but they largely remain perception- or diagnostic-oriented and do not systematically evaluate whether predicted behaviors can be translated into executable actions that complete the intended task. To address this gap, we introduce RoboWM-Bench, a manipulation-centric benchmark for embodiment-grounded evaluation of video world models. RoboWM-Bench converts generated behaviors from both human-hand and robotic manipulation videos into embodied action sequences and validates them through robotic execution. The benchmark spans diverse manipulation scenarios and establishes a unified protocol for consistent and reproducible evaluation. Using RoboWM-Bench, we evaluate state-of-the-art video world models and find that reliably generating physically executable behaviors remains an open challenge. Common failure modes include errors in spatial reasoning, unstable contact prediction, and non-physical deformations. While finetuning on manipulation data yields improvements, physical inconsistencies still persist, suggesting opportunities for more physically grounded video generation for robots.
T2M Mamba: Motion Periodicity-Saliency Coupling Approach for Stable Text-Driven Motion Generation
Feb 01, 2026Text-to-motion generation, which converts motion language descriptions into coherent 3D human motion sequences, has attracted increasing attention in fields, such as avatar animation and humanoid robotic interaction. Though existing models have achieved significant fidelity, they still suffer from two core limitations: (i) They treat motion periodicity and keyframe saliency as independent factors, overlooking their coupling and causing generation drift in long sequences. (ii) They are fragile to semantically equivalent paraphrases, where minor synonym substitutions distort textual embeddings, propagating through the decoder and producing unstable or erroneous motions. In this work, we propose T2M Mamba to address these limitations by (i) proposing Periodicity-Saliency Aware Mamba, which utilizes novel algorithms for keyframe weight estimation via enhanced Density Peaks Clustering and motion periodicity estimation via FFT-accelerated autocorrelation to capture coupled dynamics with minimal computational overhead, and (ii) constructing a Periodic Differential Cross-modal Alignment Module (PDCAM) to enhance robust alignment of textual and motion embeddings. Extensive experiments on HumanML3D and KIT-ML datasets have been conducted, confirming the effectiveness of our approach, achieving an FID of 0.068 and consistent gains on all other metrics.
Accelerating Diffusion-based Text-to-Speech Model Training with Dual Modality Alignment
May 26, 2025The goal of this paper is to optimize the training process of diffusion-based text-to-speech models. While recent studies have achieved remarkable advancements, their training demands substantial time and computational costs, largely due to the implicit guidance of diffusion models in learning complex intermediate representations. To address this, we propose A-DMA, an effective strategy for Accelerating training with Dual Modality Alignment. Our method introduces a novel alignment pipeline leveraging both text and speech modalities: text-guided alignment, which incorporates contextual representations, and speech-guided alignment, which refines semantic representations. By aligning hidden states with discriminative features, our training scheme reduces the reliance on diffusion models for learning complex representations. Extensive experiments demonstrate that A-DMA doubles the convergence speed while achieving superior performance over baselines. Code and demo samples are available at: https://github.com/ZhikangNiu/A-DMA
EdgePoint2: Compact Descriptors for Superior Efficiency and Accuracy
Apr 24, 2025The field of keypoint extraction, which is essential for vision applications like Structure from Motion (SfM) and Simultaneous Localization and Mapping (SLAM), has evolved from relying on handcrafted methods to leveraging deep learning techniques. While deep learning approaches have significantly improved performance, they often incur substantial computational costs, limiting their deployment in real-time edge applications. Efforts to create lightweight neural networks have seen some success, yet they often result in trade-offs between efficiency and accuracy. Additionally, the high-dimensional descriptors generated by these networks poses challenges for distributed applications requiring efficient communication and coordination, highlighting the need for compact yet competitively accurate descriptors. In this paper, we present EdgePoint2, a series of lightweight keypoint detection and description neural networks specifically tailored for edge computing applications on embedded system. The network architecture is optimized for efficiency without sacrificing accuracy. To train compact descriptors, we introduce a combination of Orthogonal Procrustes loss and similarity loss, which can serve as a general approach for hypersphere embedding distillation tasks. Additionally, we offer 14 sub-models to satisfy diverse application requirements. Our experiments demonstrate that EdgePoint2 consistently achieves state-of-the-art (SOTA) accuracy and efficiency across various challenging scenarios while employing lower-dimensional descriptors (32/48/64). Beyond its accuracy, EdgePoint2 offers significant advantages in flexibility, robustness, and versatility. Consequently, EdgePoint2 emerges as a highly competitive option for visual tasks, especially in contexts demanding adaptability to diverse computational and communication constraints.
Empowering AI to Generate Better AI Code: Guided Generation of Deep Learning Projects with LLMs
Apr 21, 2025While large language models (LLMs) have been widely applied to code generation, they struggle with generating entire deep learning projects, which are characterized by complex structures, longer functions, and stronger reliance on domain knowledge than general-purpose code. An open-domain LLM often lacks coherent contextual guidance and domain expertise for specific projects, making it challenging to produce complete code that fully meets user requirements. In this paper, we propose a novel planning-guided code generation method, DLCodeGen, tailored for generating deep learning projects. DLCodeGen predicts a structured solution plan, offering global guidance for LLMs to generate the project. The generated plan is then leveraged to retrieve semantically analogous code samples and subsequently abstract a code template. To effectively integrate these multiple retrieval-augmented techniques, a comparative learning mechanism is designed to generate the final code. We validate the effectiveness of our approach on a dataset we build for deep learning code generation. Experimental results demonstrate that DLCodeGen outperforms other baselines, achieving improvements of 9.7% in CodeBLEU and 3.6% in human evaluation metrics.
HiSTF Mamba: Hierarchical Spatiotemporal Fusion with Multi-Granular Body-Spatial Modeling for High-Fidelity Text-to-Motion Generation
Mar 10, 2025Text-to-motion generation is a rapidly growing field at the nexus of multimodal learning and computer graphics, promising flexible and cost-effective applications in gaming, animation, robotics, and virtual reality. Existing approaches often rely on simple spatiotemporal stacking, which introduces feature redundancy, while subtle joint-level details remain overlooked from a spatial perspective. To this end, we propose a novel HiSTF Mamba framework. The framework is composed of three key modules: Dual-Spatial Mamba, Bi-Temporal Mamba, and Dynamic Spatiotemporal Fusion Module (DSFM). Dual-Spatial Mamba incorporates ``Part-based + Whole-based'' parallel modeling to represent both whole-body coordination and fine-grained joint dynamics. Bi-Temporal Mamba adopts a bidirectional scanning strategy, effectively encoding short-term motion details and long-term dependencies. DSFM further performs redundancy removal and extraction of complementary information for temporal features, then fuses them with spatial features, yielding an expressive spatio-temporal representation. Experimental results on the HumanML3D dataset demonstrate that HiSTF Mamba achieves state-of-the-art performance across multiple metrics. In particular, it reduces the FID score from 0.283 to 0.189, a relative decrease of nearly 30%. These findings validate the effectiveness of HiSTF Mamba in achieving high fidelity and strong semantic alignment in text-to-motion generation.
GTransPDM: A Graph-embedded Transformer with Positional Decoupling for Pedestrian Crossing Intention Prediction
Sep 30, 2024



Understanding and predicting pedestrian crossing behavioral intention is crucial for autonomous vehicles driving safety. Nonetheless, challenges emerge when using promising images or environmental context masks to extract various factors for time-series network modeling, causing pre-processing errors or a loss in efficiency. Typically, pedestrian positions captured by onboard cameras are often distorted and do not accurately reflect their actual movements. To address these issues, GTransPDM -- a Graph-embedded Transformer with a Position Decoupling Module -- was developed for pedestrian crossing intention prediction by leveraging multi-modal features. First, a positional decoupling module was proposed to decompose the pedestrian lateral movement and simulate depth variations in the image view. Then, a graph-embedded Transformer was designed to capture the spatial-temporal dynamics of human pose skeletons, integrating essential factors such as position, skeleton, and ego-vehicle motion. Experimental results indicate that the proposed method achieves 92% accuracy on the PIE dataset and 87% accuracy on the JAAD dataset, with a processing speed of 0.05ms. It outperforms the state-of-the-art in comparison.
Language-Driven Interactive Traffic Trajectory Generation
May 24, 2024
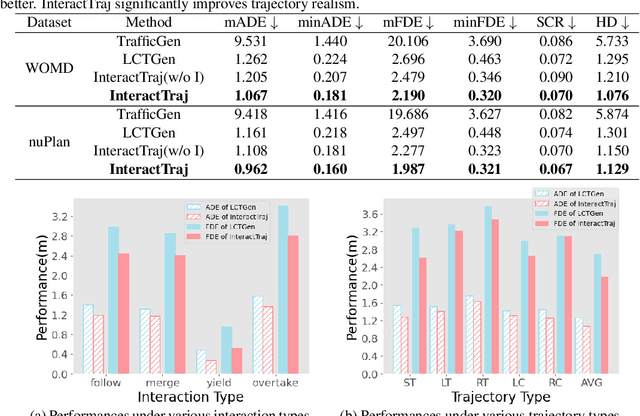

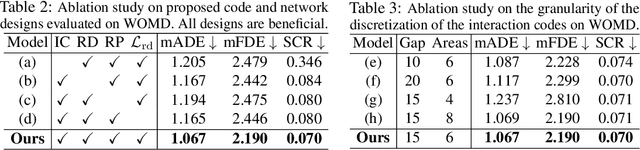
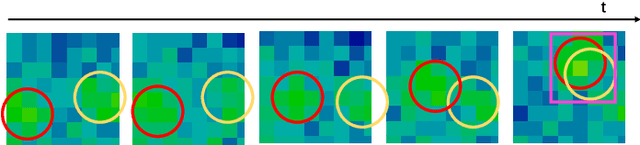
Realistic trajectory generation with natural language control is pivotal for advancing autonomous vehicle technology. However, previous methods focus on individual traffic participant trajectory generation, thus failing to account for the complexity of interactive traffic dynamics. In this work, we propose InteractTraj, the first language-driven traffic trajectory generator that can generate interactive traffic trajectories. InteractTraj interprets abstract trajectory descriptions into concrete formatted interaction-aware numerical codes and learns a mapping between these formatted codes and the final interactive trajectories. To interpret language descriptions, we propose a language-to-code encoder with a novel interaction-aware encoding strategy. To produce interactive traffic trajectories, we propose a code-to-trajectory decoder with interaction-aware feature aggregation that synergizes vehicle interactions with the environmental map and the vehicle moves. Extensive experiments show our method demonstrates superior performance over previous SoTA methods, offering a more realistic generation of interactive traffic trajectories with high controllability via diverse natural language commands. Our code is available at https://github.com/X1a-jk/InteractTraj.git
HW-SW Optimization of DNNs for Privacy-preserving People Counting on Low-resolution Infrared Arrays
Feb 02, 2024



Low-resolution infrared (IR) array sensors enable people counting applications such as monitoring the occupancy of spaces and people flows while preserving privacy and minimizing energy consumption. Deep Neural Networks (DNNs) have been shown to be well-suited to process these sensor data in an accurate and efficient manner. Nevertheless, the space of DNNs' architectures is huge and its manual exploration is burdensome and often leads to sub-optimal solutions. To overcome this problem, in this work, we propose a highly automated full-stack optimization flow for DNNs that goes from neural architecture search, mixed-precision quantization, and post-processing, down to the realization of a new smart sensor prototype, including a Microcontroller with a customized instruction set. Integrating these cross-layer optimizations, we obtain a large set of Pareto-optimal solutions in the 3D-space of energy, memory, and accuracy. Deploying such solutions on our hardware platform, we improve the state-of-the-art achieving up to 4.2x model size reduction, 23.8x code size reduction, and 15.38x energy reduction at iso-accuracy.
Efficient Deep Learning Models for Privacy-preserving People Counting on Low-resolution Infrared Arrays
Apr 12, 2023


Ultra-low-resolution Infrared (IR) array sensors offer a low-cost, energy-efficient, and privacy-preserving solution for people counting, with applications such as occupancy monitoring. Previous work has shown that Deep Learning (DL) can yield superior performance on this task. However, the literature was missing an extensive comparative analysis of various efficient DL architectures for IR array-based people counting, that considers not only their accuracy, but also the cost of deploying them on memory- and energy-constrained Internet of Things (IoT) edge nodes. In this work, we address this need by comparing 6 different DL architectures on a novel dataset composed of IR images collected from a commercial 8x8 array, which we made openly available. With a wide architectural exploration of each model type, we obtain a rich set of Pareto-optimal solutions, spanning cross-validated balanced accuracy scores in the 55.70-82.70% range. When deployed on a commercial Microcontroller (MCU) by STMicroelectronics, the STM32L4A6ZG, these models occupy 0.41-9.28kB of memory, and require 1.10-7.74ms per inference, while consuming 17.18-120.43 $\mu$J of energy. Our models are significantly more accurate than a previous deterministic method (up to +39.9%), while being up to 3.53x faster and more energy efficient. Further, our models' accuracy is comparable to state-of-the-art DL solutions on similar resolution sensors, despite a much lower complexity. All our models enable continuous, real-time inference on a MCU-based IoT node, with years of autonomous operation without battery recharging.