 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLanguage-Driven Interactive Traffic Trajectory Generation
Paper and Code

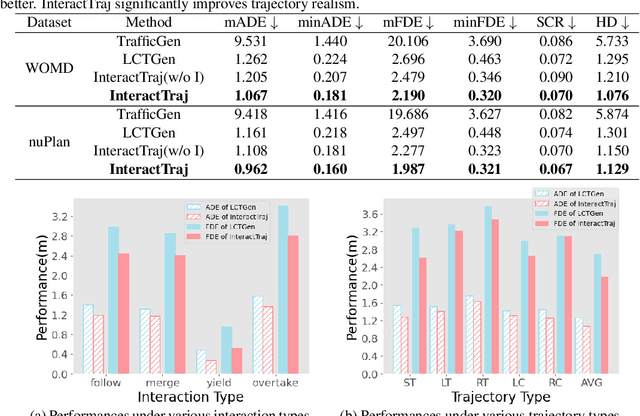

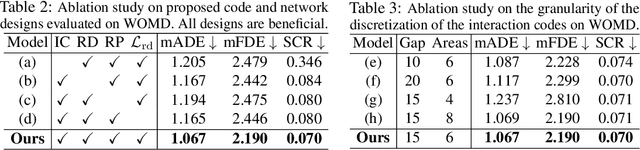
Realistic trajectory generation with natural language control is pivotal for advancing autonomous vehicle technology. However, previous methods focus on individual traffic participant trajectory generation, thus failing to account for the complexity of interactive traffic dynamics. In this work, we propose InteractTraj, the first language-driven traffic trajectory generator that can generate interactive traffic trajectories. InteractTraj interprets abstract trajectory descriptions into concrete formatted interaction-aware numerical codes and learns a mapping between these formatted codes and the final interactive trajectories. To interpret language descriptions, we propose a language-to-code encoder with a novel interaction-aware encoding strategy. To produce interactive traffic trajectories, we propose a code-to-trajectory decoder with interaction-aware feature aggregation that synergizes vehicle interactions with the environmental map and the vehicle moves. Extensive experiments show our method demonstrates superior performance over previous SoTA methods, offering a more realistic generation of interactive traffic trajectories with high controllability via diverse natural language commands. Our code is available at https://github.com/X1a-jk/InteractTraj.git