 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEquivariant Filter Transformations for Consistent and Efficient Visual--Inertial Navigation
Mar 25, 2026This paper presents an equivariant filter (EqF) transformation approach for visual--inertial navigation. By establishing analytical links between EqFs with different symmetries, the proposed approach enables systematic consistency design and efficient implementation. First, we formalize the mapping from the global system state to the local error-state and prove that it induces a nonsingular linear transformation between the error-states of any two EqFs. Second, we derive transformation laws for the associated linearized error-state systems and unobservable subspaces. These results yield a general consistency design principle: for any unobservable system, a consistent EqF with a state-independent unobservable subspace can be synthesized by transforming the local coordinate chart, thereby avoiding ad hoc symmetry analysis. Third, to mitigate the computational burden arising from the non-block-diagonal Jacobians required for consistency, we propose two efficient implementation strategies. These strategies exploit the Jacobians of a simpler EqF with block-diagonal structure to accelerate covariance operations while preserving consistency. Extensive Monte Carlo simulations and real-world experiments validate the proposed approach in terms of both accuracy and runtime.
CLIDD: Cross-Layer Independent Deformable Description for Efficient and Discriminative Local Feature Representation
Jan 14, 2026Robust local feature representations are essential for spatial intelligence tasks such as robot navigation and augmented reality. Establishing reliable correspondences requires descriptors that provide both high discriminative power and computational efficiency. To address this, we introduce Cross-Layer Independent Deformable Description (CLIDD), a method that achieves superior distinctiveness by sampling directly from independent feature hierarchies. This approach utilizes learnable offsets to capture fine-grained structural details across scales while bypassing the computational burden of unified dense representations. To ensure real-time performance, we implement a hardware-aware kernel fusion strategy that maximizes inference throughput. Furthermore, we develop a scalable framework that integrates lightweight architectures with a training protocol leveraging both metric learning and knowledge distillation. This scheme generates a wide spectrum of model variants optimized for diverse deployment constraints. Extensive evaluations demonstrate that our approach achieves superior matching accuracy and exceptional computational efficiency simultaneously. Specifically, the ultra-compact variant matches the precision of SuperPoint while utilizing only 0.004M parameters, achieving a 99.7% reduction in model size. Furthermore, our high-performance configuration outperforms all current state-of-the-art methods, including high-capacity DINOv2-based frameworks, while exceeding 200 FPS on edge devices. These results demonstrate that CLIDD delivers high-precision local feature matching with minimal computational overhead, providing a robust and scalable solution for real-time spatial intelligence tasks.
EdgePoint2: Compact Descriptors for Superior Efficiency and Accuracy
Apr 24, 2025The field of keypoint extraction, which is essential for vision applications like Structure from Motion (SfM) and Simultaneous Localization and Mapping (SLAM), has evolved from relying on handcrafted methods to leveraging deep learning techniques. While deep learning approaches have significantly improved performance, they often incur substantial computational costs, limiting their deployment in real-time edge applications. Efforts to create lightweight neural networks have seen some success, yet they often result in trade-offs between efficiency and accuracy. Additionally, the high-dimensional descriptors generated by these networks poses challenges for distributed applications requiring efficient communication and coordination, highlighting the need for compact yet competitively accurate descriptors. In this paper, we present EdgePoint2, a series of lightweight keypoint detection and description neural networks specifically tailored for edge computing applications on embedded system. The network architecture is optimized for efficiency without sacrificing accuracy. To train compact descriptors, we introduce a combination of Orthogonal Procrustes loss and similarity loss, which can serve as a general approach for hypersphere embedding distillation tasks. Additionally, we offer 14 sub-models to satisfy diverse application requirements. Our experiments demonstrate that EdgePoint2 consistently achieves state-of-the-art (SOTA) accuracy and efficiency across various challenging scenarios while employing lower-dimensional descriptors (32/48/64). Beyond its accuracy, EdgePoint2 offers significant advantages in flexibility, robustness, and versatility. Consequently, EdgePoint2 emerges as a highly competitive option for visual tasks, especially in contexts demanding adaptability to diverse computational and communication constraints.
A Transformation-based Consistent Estimation Framework: Analysis, Design and Applications
Feb 07, 2025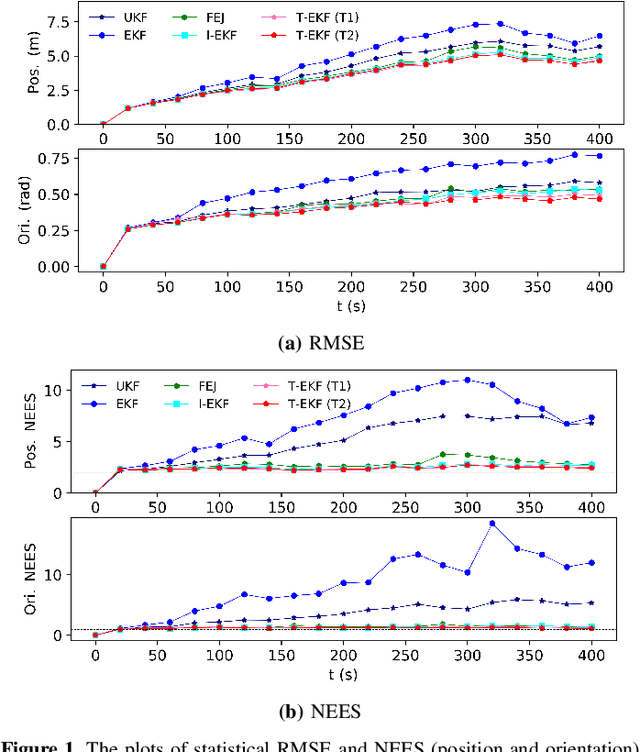
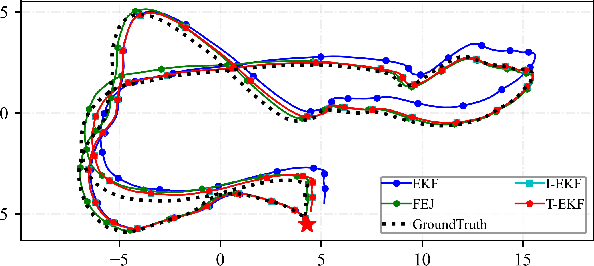
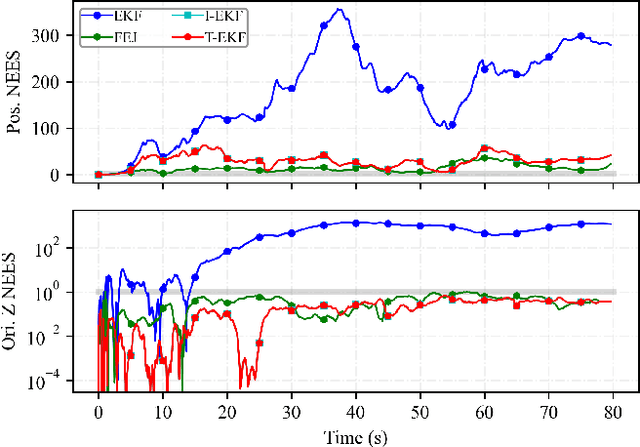
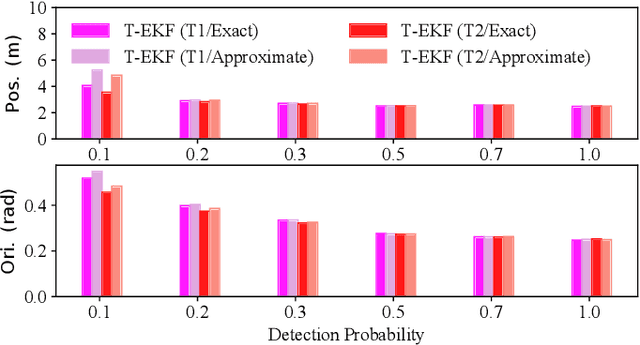
In this paper, we investigate the inconsistency problem arising from observability mismatch that frequently occurs in nonlinear systems such as multi-robot cooperative localization and simultaneous localization and mapping. For a general nonlinear system, we discover and theoretically prove that the unobservable subspace of the EKF estimator system is independent of the state and belongs to the unobservable subspace of the original system. On this basis, we establish the necessary and sufficient conditions for achieving observability matching. These theoretical findings motivate us to introduce a linear time-varying transformation to achieve a transformed system possessing a state-independent unobservable subspace. We prove the existence of such transformations and propose two design methodologies for constructing them. Moreover, we propose two equivalent consistent transformation-based EKF estimators, referred to as T-EKF 1 and T-EKF 2, respectively. T-EKF 1 employs the transformed system for consistent estimation, whereas T-EKF 2 leverages the original system but ensures consistency through state and covariance corrections from transformations. To validate our proposed methods, we conduct experiments on several representative examples, including multi-robot cooperative localization, multi-source target tracking, and 3D visual-inertial odometry, demonstrating that our approach achieves state-of-the-art performance in terms of accuracy, consistency, computational efficiency, and practical realizations.
Community Detection with Heterogeneous Block Covariance Model
Dec 04, 2024Community detection is the task of clustering objects based on their pairwise relationships. Most of the model-based community detection methods, such as the stochastic block model and its variants, are designed for networks with binary (yes/no) edges. In many practical scenarios, edges often possess continuous weights, spanning positive and negative values, which reflect varying levels of connectivity. To address this challenge, we introduce the heterogeneous block covariance model (HBCM) that defines a community structure within the covariance matrix, where edges have signed and continuous weights. Furthermore, it takes into account the heterogeneity of objects when forming connections with other objects within a community. A novel variational expectation-maximization algorithm is proposed to estimate the group membership. The HBCM provides provable consistent estimates of memberships, and its promising performance is observed in numerical simulations with different setups. The model is applied to a single-cell RNA-seq dataset of a mouse embryo and a stock price dataset. Supplementary materials for this article are available online.
Distributed Consistent Multi-robot Cooperative Localization: A Coordinate Transformation Approach
Mar 02, 2023This paper considers the problem of distributed cooperative localization (CL) via robot-to-robot measurements for a multi-robot system. We propose a distributed consistent CL algorithm. The key idea is to perform the EKF-based state estimation in a transformed coordinate system. Specifically, a coordinate transformation is constructed by decomposing the state-propagation Jacobian by which the correct observability properties are guaranteed. Moreover, the transformed state-propagation Jacobian becomes an identity matrix which is more suitable for distribution. In the proposed algorithm, a server-based framework is adopted to distributely estimate the robot pose in which each robot propagates its pose estimations and the server maintains the correlations. To reduce communication costs, only when the multi-robot system takes a robot-to-robot relative measurement, the robots and the server exchange information to update the pose estimations and the correlations. In addition, no assumptions are made about the type of robots or relative measurements. The proposed algorithm has been validated by experiments and shown to outperform the state-of-art algorithms in terms of consistency and accuracy.
KD-EKF: A Kalman Decomposition Based Extended Kalman Filter for Multi-Robot Cooperative Localization
Oct 28, 2022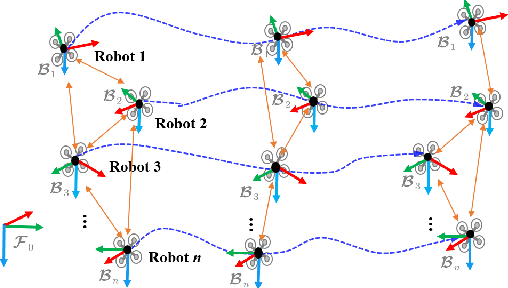
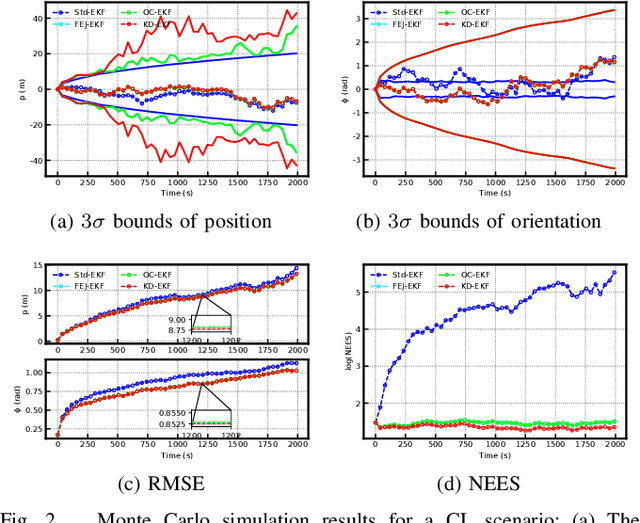
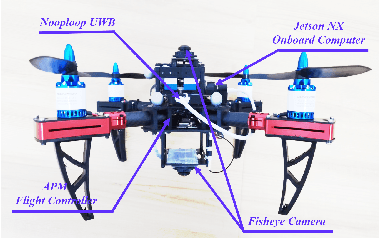
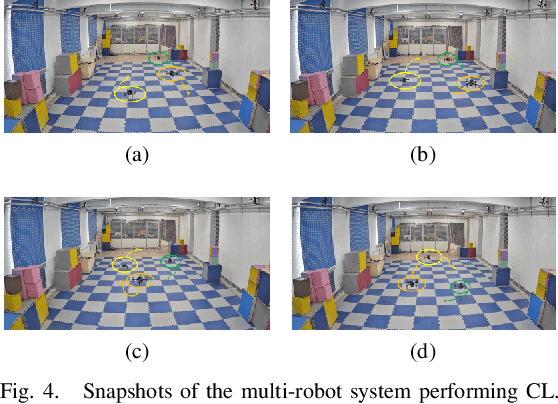
This paper investigates the consistency problem of EKF-based cooperative localization (CL) from the perspective of Kalman decomposition, which decomposes the observable and unobservable states and allows treating them individually. The factors causing the dimension reduction of the unobservable subspace, termed error discrepancy items, are explicitly isolated and identified in the state propagation and measurement Jacobians for the first time. We prove that the error discrepancy items lead to the global orientation being erroneously observable, which in turn causes the state estimation to be inconsistent. A CL algorithm, called Kalman decomposition-based EKF (KD-EKF), is proposed to improve consistency. The key idea is to perform state estimation using the Kalman observable canonical form in the transformed coordinates. By annihilating the error discrepancy items, proper observability properties are guaranteed. More importantly, the modified state propagation and measurement Jacobians are exactly equivalent to linearizing the nonlinear CL system at current best state estimates. Consequently, the inconsistency caused by the erroneous dimension reduction of the unobservable subspace is completely eliminated. The KD-EKF CL algorithm has been extensively verified in both Monte Carlo simulations and real-world experiments and shown to achieve better performance than state-of-the-art algorithms in terms of accuracy and consistency.
Variational Estimators of the Degree-corrected Latent Block Model for Bipartite Networks
Jun 16, 2022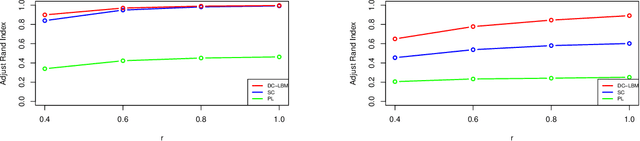
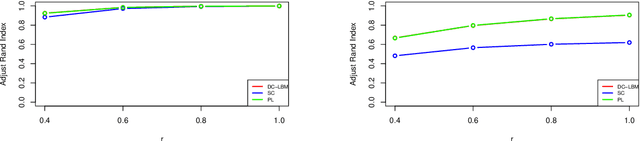

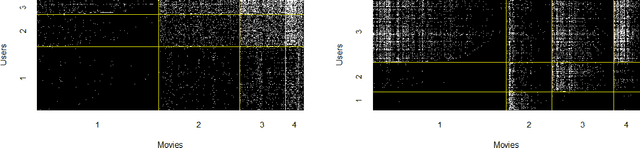
Biclustering on bipartite graphs is an unsupervised learning task that simultaneously clusters the two types of objects in the graph, for example, users and movies in a movie review dataset. The latent block model (LBM) has been proposed as a model-based tool for biclustering. Biclustering results by the LBM are, however, usually dominated by the row and column sums of the data matrix, i.e., degrees. We propose a degree-corrected latent block model (DC-LBM) to accommodate degree heterogeneity in row and column clusters, which greatly outperforms the classical LBM in the MovieLens dataset and simulated data. We develop an efficient variational expectation-maximization algorithm by observing that the row and column degrees maximize the objective function in the M step given any probability assignment on the cluster labels. We prove the label consistency of the variational estimator under the DC-LBM, which allows the expected graph density goes to zero as long as the average expected degrees of rows and columns go to infinity.
Novel methods for multilinear data completion and de-noising based on tensor-SVD
Oct 30, 2014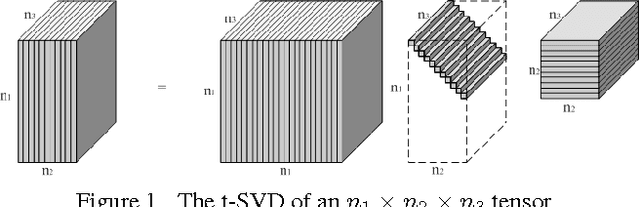
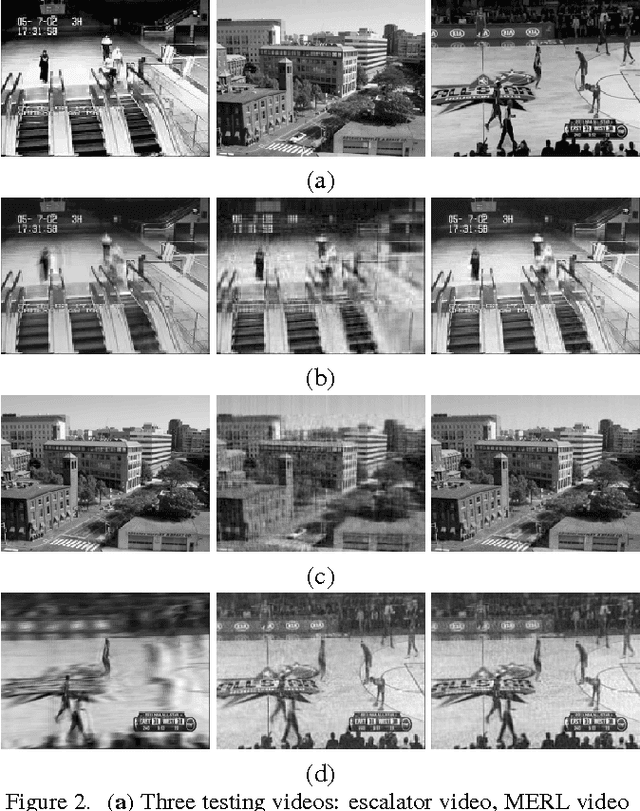
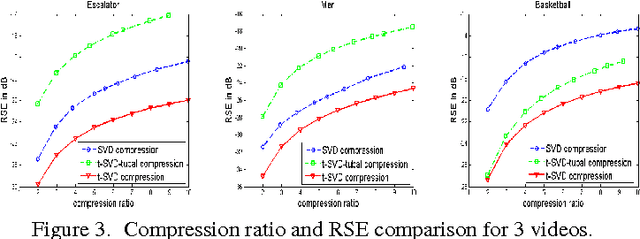
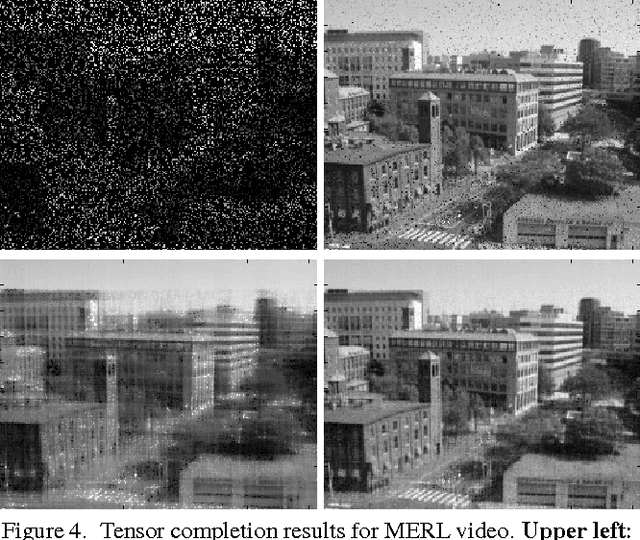
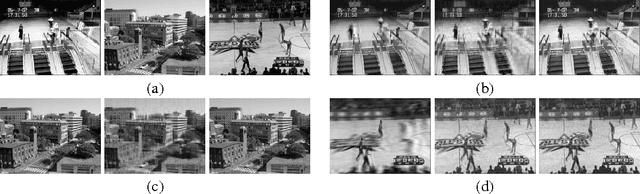
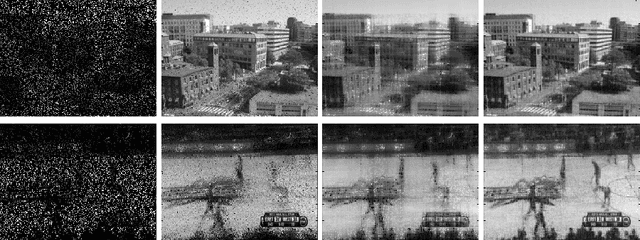
In this paper we propose novel methods for completion (from limited samples) and de-noising of multilinear (tensor) data and as an application consider 3-D and 4- D (color) video data completion and de-noising. We exploit the recently proposed tensor-Singular Value Decomposition (t-SVD)[11]. Based on t-SVD, the notion of multilinear rank and a related tensor nuclear norm was proposed in [11] to characterize informational and structural complexity of multilinear data. We first show that videos with linear camera motion can be represented more efficiently using t-SVD compared to the approaches based on vectorizing or flattening of the tensors. Since efficiency in representation implies efficiency in recovery, we outline a tensor nuclear norm penalized algorithm for video completion from missing entries. Application of the proposed algorithm for video recovery from missing entries is shown to yield a superior performance over existing methods. We also consider the problem of tensor robust Principal Component Analysis (PCA) for de-noising 3-D video data from sparse random corruptions. We show superior performance of our method compared to the matrix robust PCA adapted to this setting as proposed in [4].
Novel Factorization Strategies for Higher Order Tensors: Implications for Compression and Recovery of Multi-linear Data
Oct 31, 2013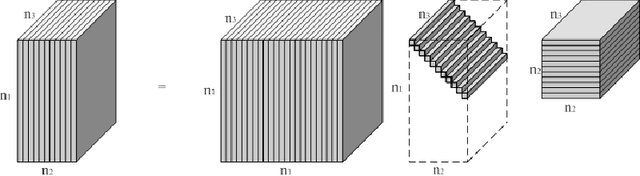
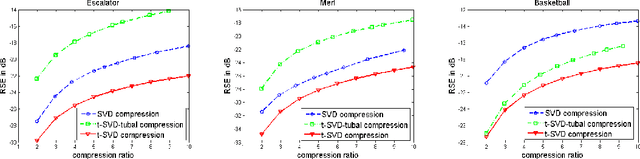
In this paper we propose novel methods for compression and recovery of multilinear data under limited sampling. We exploit the recently proposed tensor- Singular Value Decomposition (t-SVD)[1], which is a group theoretic framework for tensor decomposition. In contrast to popular existing tensor decomposition techniques such as higher-order SVD (HOSVD), t-SVD has optimality properties similar to the truncated SVD for matrices. Based on t-SVD, we first construct novel tensor-rank like measures to characterize informational and structural complexity of multilinear data. Following that we outline a complexity penalized algorithm for tensor completion from missing entries. As an application, 3-D and 4-D (color) video data compression and recovery are considered. We show that videos with linear camera motion can be represented more efficiently using t-SVD compared to traditional approaches based on vectorizing or flattening of the tensors. Application of the proposed tensor completion algorithm for video recovery from missing entries is shown to yield a superior performance over existing methods. In conclusion we point out several research directions and implications to online prediction of multilinear data.