 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShotFinder: Imagination-Driven Open-Domain Video Shot Retrieval via Web Search
Jan 30, 2026In recent years, large language models (LLMs) have made rapid progress in information retrieval, yet existing research has mainly focused on text or static multimodal settings. Open-domain video shot retrieval, which involves richer temporal structure and more complex semantics, still lacks systematic benchmarks and analysis. To fill this gap, we introduce ShotFinder, a benchmark that formalizes editing requirements as keyframe-oriented shot descriptions and introduces five types of controllable single-factor constraints: Temporal order, Color, Visual style, Audio, and Resolution. We curate 1,210 high-quality samples from YouTube across 20 thematic categories, using large models for generation with human verification. Based on the benchmark, we propose ShotFinder, a text-driven three-stage retrieval and localization pipeline: (1) query expansion via video imagination, (2) candidate video retrieval with a search engine, and (3) description-guided temporal localization. Experiments on multiple closed-source and open-source models reveal a significant gap to human performance, with clear imbalance across constraints: temporal localization is relatively tractable, while color and visual style remain major challenges. These results reveal that open-domain video shot retrieval is still a critical capability that multimodal large models have yet to overcome.
Lethe: Layer- and Time-Adaptive KV Cache Pruning for Reasoning-Intensive LLM Serving
Nov 12, 2025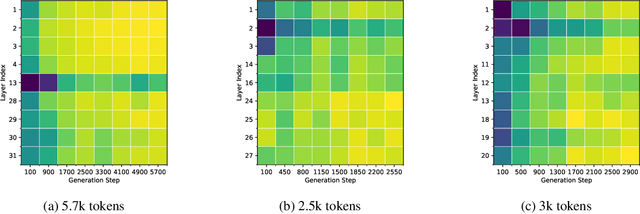
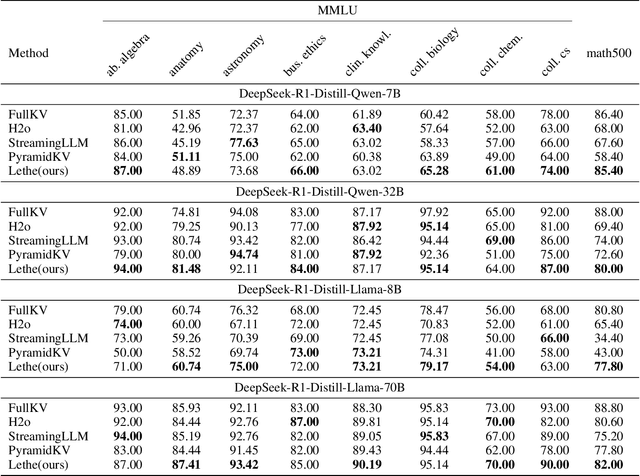
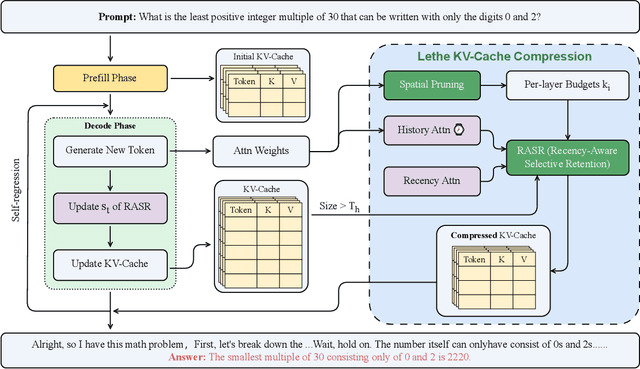

Generative reasoning with large language models (LLMs) often involves long decoding sequences, leading to substantial memory and latency overheads from accumulating key-value (KV) caches. While existing KV compression methods primarily focus on reducing prefill memory from long input sequences, they fall short in addressing the dynamic and layer-sensitive nature of long-form generation, which is central to reasoning tasks. We propose Lethe, a dynamic KV cache management framework that introduces adaptivity along both the spatial and temporal dimensions of decoding. Along the spatial dimension, Lethe performs layerwise sparsity-aware allocation, assigning token pruning budgets to each transformer layer based on estimated attention redundancy. Along the temporal dimension, Lethe conducts multi-round token pruning during generation, driven by a Recency-Aware Selective Retention} (RASR) mechanism. RASR extends traditional recency-based heuristics by also considering token relevance derived from evolving attention patterns, enabling informed decisions about which tokens to retain or evict. Empirical results demonstrate that Lethe achieves a favorable balance between efficiency and generation quality across diverse models and tasks, increases throughput by up to 2.56x.
GRAIL:Learning to Interact with Large Knowledge Graphs for Retrieval Augmented Reasoning
Aug 07, 2025Large Language Models (LLMs) integrated with Retrieval-Augmented Generation (RAG) techniques have exhibited remarkable performance across a wide range of domains. However, existing RAG approaches primarily operate on unstructured data and demonstrate limited capability in handling structured knowledge such as knowledge graphs. Meanwhile, current graph retrieval methods fundamentally struggle to capture holistic graph structures while simultaneously facing precision control challenges that manifest as either critical information gaps or excessive redundant connections, collectively undermining reasoning performance. To address this challenge, we propose GRAIL: Graph-Retrieval Augmented Interactive Learning, a framework designed to interact with large-scale graphs for retrieval-augmented reasoning. Specifically, GRAIL integrates LLM-guided random exploration with path filtering to establish a data synthesis pipeline, where a fine-grained reasoning trajectory is automatically generated for each task. Based on the synthesized data, we then employ a two-stage training process to learn a policy that dynamically decides the optimal actions at each reasoning step. The overall objective of precision-conciseness balance in graph retrieval is decoupled into fine-grained process-supervised rewards to enhance data efficiency and training stability. In practical deployment, GRAIL adopts an interactive retrieval paradigm, enabling the model to autonomously explore graph paths while dynamically balancing retrieval breadth and precision. Extensive experiments have shown that GRAIL achieves an average accuracy improvement of 21.01% and F1 improvement of 22.43% on three knowledge graph question-answering datasets. Our source code and datasets is available at https://github.com/Changgeww/GRAIL.
MST-Distill: Mixture of Specialized Teachers for Cross-Modal Knowledge Distillation
Jul 09, 2025Knowledge distillation as an efficient knowledge transfer technique, has achieved remarkable success in unimodal scenarios. However, in cross-modal settings, conventional distillation methods encounter significant challenges due to data and statistical heterogeneities, failing to leverage the complementary prior knowledge embedded in cross-modal teacher models. This paper empirically reveals two critical issues in existing approaches: distillation path selection and knowledge drift. To address these limitations, we propose MST-Distill, a novel cross-modal knowledge distillation framework featuring a mixture of specialized teachers. Our approach employs a diverse ensemble of teacher models across both cross-modal and multimodal configurations, integrated with an instance-level routing network that facilitates adaptive and dynamic distillation. This architecture effectively transcends the constraints of traditional methods that rely on monotonous and static teacher models. Additionally, we introduce a plug-in masking module, independently trained to suppress modality-specific discrepancies and reconstruct teacher representations, thereby mitigating knowledge drift and enhancing transfer effectiveness. Extensive experiments across five diverse multimodal datasets, spanning visual, audio, and text, demonstrate that our method significantly outperforms existing state-of-the-art knowledge distillation methods in cross-modal distillation tasks. The source code is available at https://github.com/Gray-OREO/MST-Distill.
Text to Image Generation and Editing: A Survey
May 05, 2025Text-to-image generation (T2I) refers to the text-guided generation of high-quality images. In the past few years, T2I has attracted widespread attention and numerous works have emerged. In this survey, we comprehensively review 141 works conducted from 2021 to 2024. First, we introduce four foundation model architectures of T2I (autoregression, non-autoregression, GAN and diffusion) and the commonly used key technologies (autoencoder, attention and classifier-free guidance). Secondly, we systematically compare the methods of these studies in two directions, T2I generation and T2I editing, including the encoders and the key technologies they use. In addition, we also compare the performance of these researches side by side in terms of datasets, evaluation metrics, training resources, and inference speed. In addition to the four foundation models, we survey other works on T2I, such as energy-based models and recent Mamba and multimodality. We also investigate the potential social impact of T2I and provide some solutions. Finally, we propose unique insights of improving the performance of T2I models and possible future development directions. In summary, this survey is the first systematic and comprehensive overview of T2I, aiming to provide a valuable guide for future researchers and stimulate continued progress in this field.
Training Verification-Friendly Neural Networks via Neuron Behavior Consistency
Dec 17, 2024



Formal verification provides critical security assurances for neural networks, yet its practical application suffers from the long verification time. This work introduces a novel method for training verification-friendly neural networks, which are robust, easy to verify, and relatively accurate. Our method integrates neuron behavior consistency into the training process, making neuron activation states consistent across different inputs in a local neighborhood, reducing the number of unstable neurons and tightening the bounds of neurons thereby enhancing neural network verifiability. We evaluated our method using the MNIST, Fashion-MNIST, and CIFAR-10 datasets across various network architectures. The results of the experiment demonstrate that networks trained using our method are verification-friendly across different radii and different model architectures, whereas other tools fail to maintain verifiability as the radius increases. We also show that our method can be combined with existing methods to further improve the verifiability of networks.
ADVREPAIR:Provable Repair of Adversarial Attack
Apr 02, 2024



Deep neural networks (DNNs) are increasingly deployed in safety-critical domains, but their vulnerability to adversarial attacks poses serious safety risks. Existing neuron-level methods using limited data lack efficacy in fixing adversaries due to the inherent complexity of adversarial attack mechanisms, while adversarial training, leveraging a large number of adversarial samples to enhance robustness, lacks provability. In this paper, we propose ADVREPAIR, a novel approach for provable repair of adversarial attacks using limited data. By utilizing formal verification, ADVREPAIR constructs patch modules that, when integrated with the original network, deliver provable and specialized repairs within the robustness neighborhood. Additionally, our approach incorporates a heuristic mechanism for assigning patch modules, allowing this defense against adversarial attacks to generalize to other inputs. ADVREPAIR demonstrates superior efficiency, scalability and repair success rate. Different from existing DNN repair methods, our repair can generalize to general inputs, thereby improving the robustness of the neural network globally, which indicates a significant breakthrough in the generalization capability of ADVREPAIR.
DeepCDCL: An CDCL-based Neural Network Verification Framework
Mar 12, 2024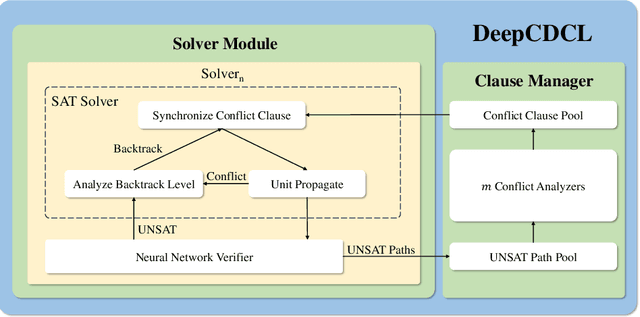
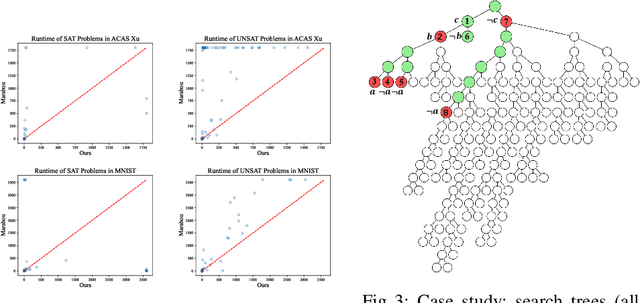
Neural networks in safety-critical applications face increasing safety and security concerns due to their susceptibility to little disturbance. In this paper, we propose DeepCDCL, a novel neural network verification framework based on the Conflict-Driven Clause Learning (CDCL) algorithm. We introduce an asynchronous clause learning and management structure, reducing redundant time consumption compared to the direct application of the CDCL framework. Furthermore, we also provide a detailed evaluation of the performance of our approach on the ACAS Xu and MNIST datasets, showing that a significant speed-up is achieved in most cases.
TrajPAC: Towards Robustness Verification of Pedestrian Trajectory Prediction Models
Aug 11, 2023Robust pedestrian trajectory forecasting is crucial to developing safe autonomous vehicles. Although previous works have studied adversarial robustness in the context of trajectory forecasting, some significant issues remain unaddressed. In this work, we try to tackle these crucial problems. Firstly, the previous definitions of robustness in trajectory prediction are ambiguous. We thus provide formal definitions for two kinds of robustness, namely label robustness and pure robustness. Secondly, as previous works fail to consider robustness about all points in a disturbance interval, we utilise a probably approximately correct (PAC) framework for robustness verification. Additionally, this framework can not only identify potential counterexamples, but also provides interpretable analyses of the original methods. Our approach is applied using a prototype tool named TrajPAC. With TrajPAC, we evaluate the robustness of four state-of-the-art trajectory prediction models -- Trajectron++, MemoNet, AgentFormer, and MID -- on trajectories from five scenes of the ETH/UCY dataset and scenes of the Stanford Drone Dataset. Using our framework, we also experimentally study various factors that could influence robustness performance.
Incremental Satisfiability Modulo Theory for Verification of Deep Neural Networks
Feb 10, 2023



Constraint solving is an elementary way for verification of deep neural networks (DNN). In the domain of AI safety, a DNN might be modified in its structure and parameters for its repair or attack. For such situations, we propose the incremental DNN verification problem, which asks whether a safety property still holds after the DNN is modified. To solve the problem, we present an incremental satisfiability modulo theory (SMT) algorithm based on the Reluplex framework. We simulate the most important features of the configurations that infers the verification result of the searching branches in the old solving procedure (with respect to the original network), and heuristically check whether the proofs are still valid for the modified DNN. We implement our algorithm as an incremental solver called DeepInc, and exerimental results show that DeepInc is more efficient in most cases. For the cases that the property holds both before and after modification, the acceleration can be faster by several orders of magnitude, showing that DeepInc is outstanding in incrementally searching for counterexamples. Moreover, based on the framework, we propose the multi-objective DNN repair problem and give an algorithm based on our incremental SMT solving algorithm. Our repair method preserves more potential safety properties on the repaired DNNs compared with state-of-the-art.