 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge3D Equivariant Diffusion for Target-Aware Molecule Generation and Affinity Prediction
Mar 06, 2023



Rich data and powerful machine learning models allow us to design drugs for a specific protein target \textit{in silico}. Recently, the inclusion of 3D structures during targeted drug design shows superior performance to other target-free models as the atomic interaction in the 3D space is explicitly modeled. However, current 3D target-aware models either rely on the voxelized atom densities or the autoregressive sampling process, which are not equivariant to rotation or easily violate geometric constraints resulting in unrealistic structures. In this work, we develop a 3D equivariant diffusion model to solve the above challenges. To achieve target-aware molecule design, our method learns a joint generative process of both continuous atom coordinates and categorical atom types with a SE(3)-equivariant network. Moreover, we show that our model can serve as an unsupervised feature extractor to estimate the binding affinity under proper parameterization, which provides an effective way for drug screening. To evaluate our model, we propose a comprehensive framework to evaluate the quality of sampled molecules from different dimensions. Empirical studies show our model could generate molecules with more realistic 3D structures and better affinities towards the protein targets, and improve binding affinity ranking and prediction without retraining.
Rapid grasping of fabric using bionic soft grippers with elastic instability
Jan 26, 2023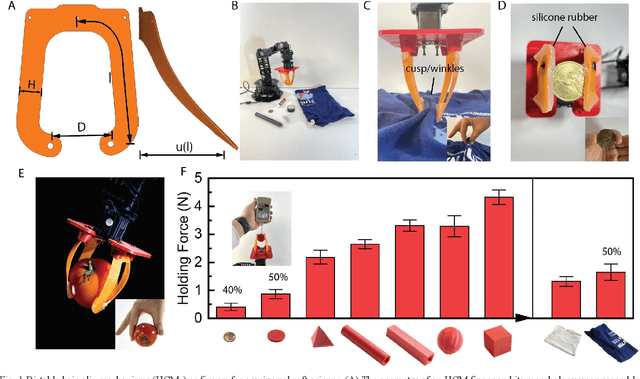
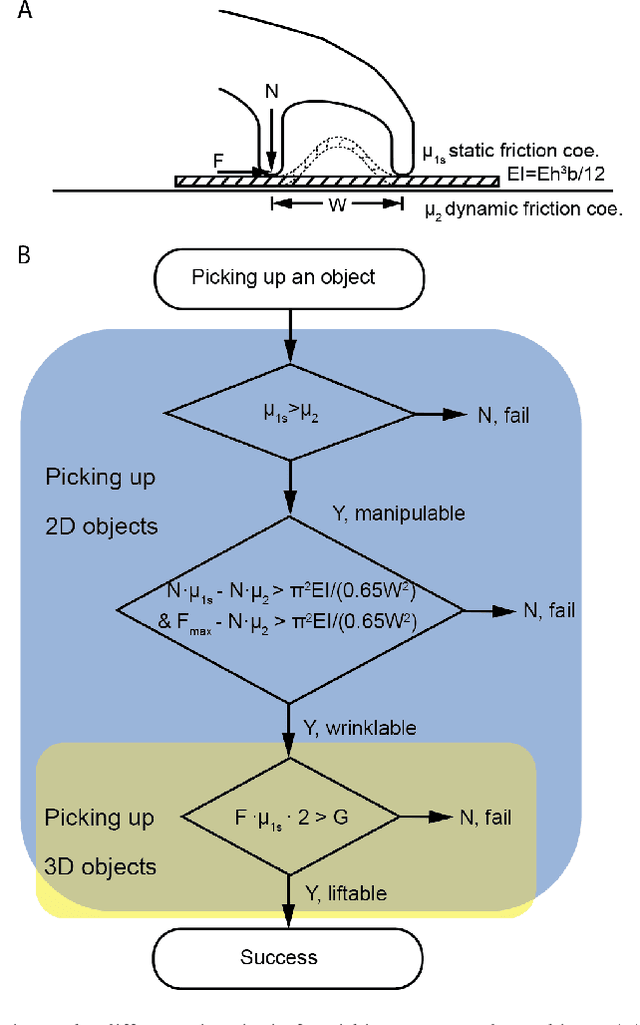
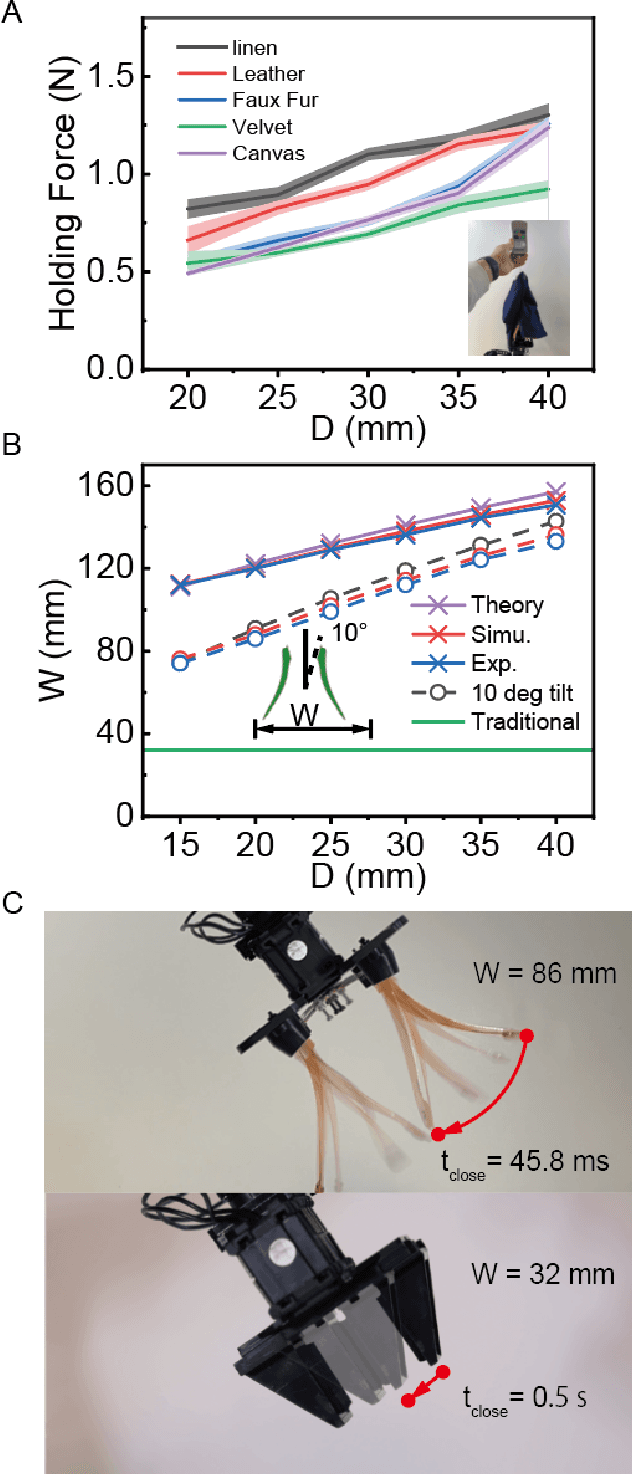
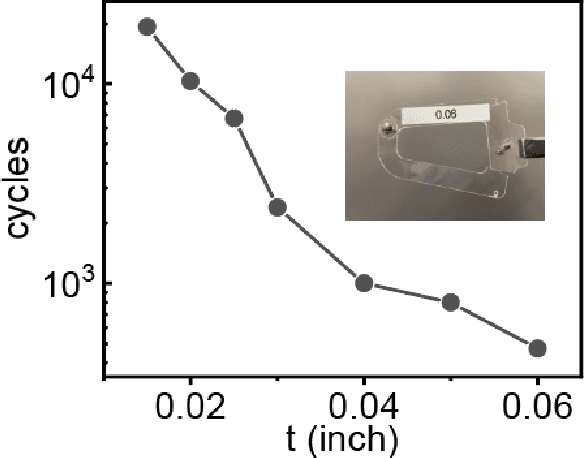
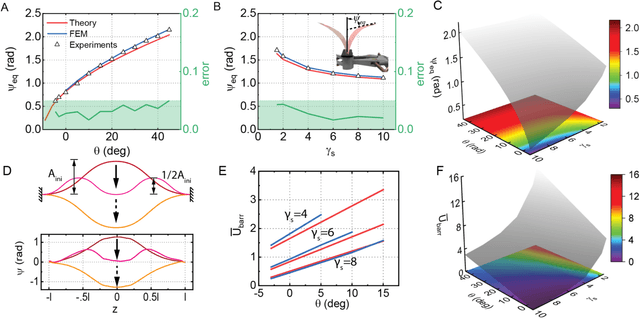
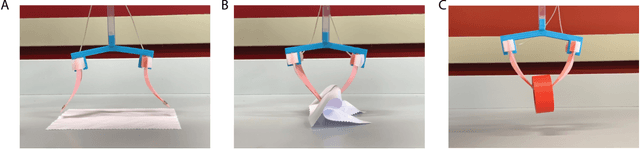
Robot grasping is subject to an inherent tradeoff: Grippers with a large span typically take a longer time to close, and fast grippers usually cover a small span. However, many practical applications of soft grippers require the ability to close a large distance rapidly. For example, grasping cloth typically requires pressing a wide span of fabric into a graspable cusp. Here, we demonstrate a human-finger-inspired snapping gripper that exploits elastic instability to achieve reversible rapid closure over a wide span. Using prestressed semi-rigid material as the skeleton, the gripper fingers can widely open (86 ~) and rapidly close (46 ms) following a trajectory similar to that of a thumb-index finger pinching which is 2.7 times and 10.9 times better than the reference gripper in terms of span and speed, respectively. We theoretically give the design principle, simulatively verify the method, and experimentally test this gripper on a variety of rigid, flexible, and limp objects and achieve good adaptivity and mechanical performance. This research helps bridge the gap between strong industry manipulators and safe human-interactive robotic hands.
Fast Untethered Soft Robotic Crawler with Elastic Instability
Oct 05, 2022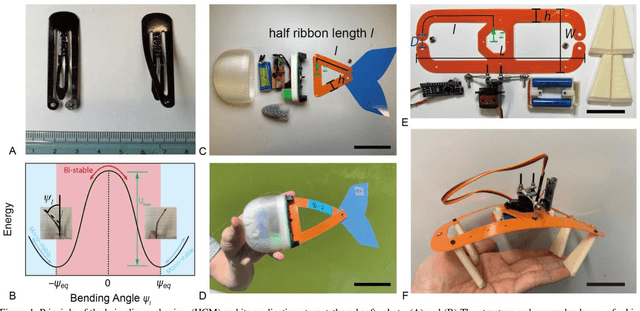
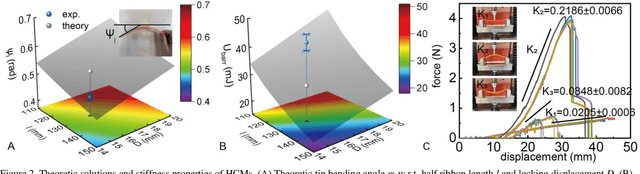
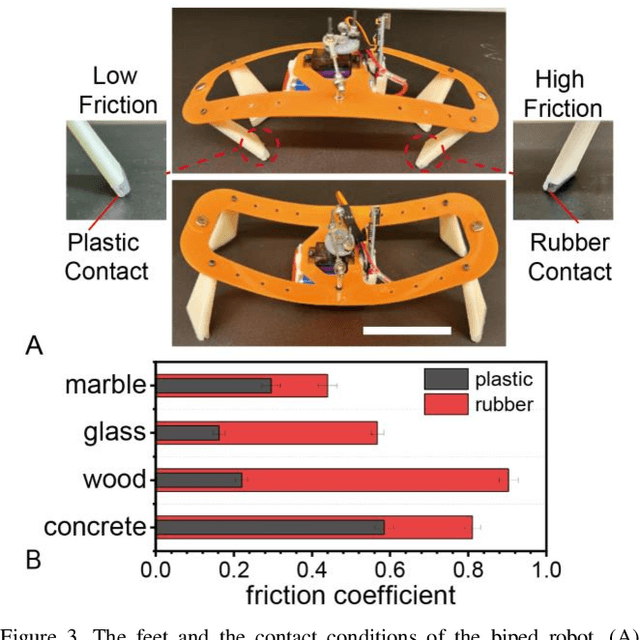
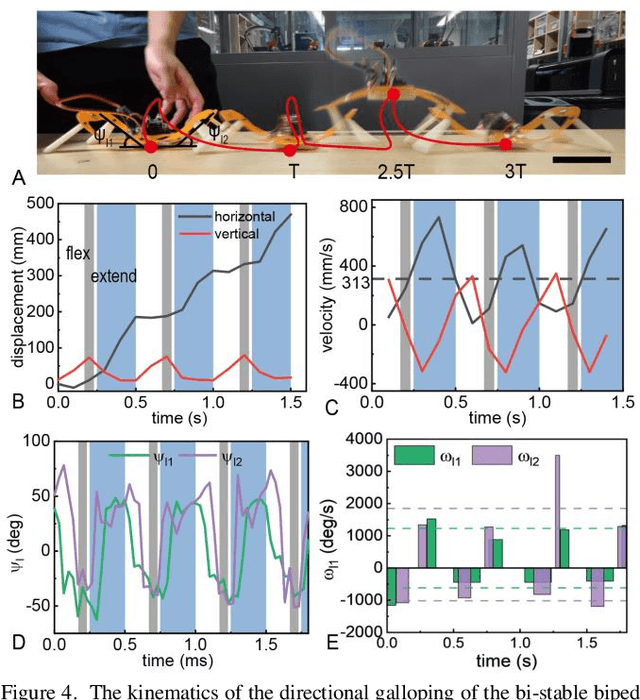
High-speed locomotion of animals gives them tremendous advantages in exploring, hunting, and escaping from predators in varying environments. Enlightened by the fast-running gait of mammals like cheetahs and wolves, we designed and fabricated a single-servo-driving untethered soft robot that is capable of galloping at a speed of 313 mm/s or 1.56 body length per second (BL/s), 5.2 times and 2.6 times faster than the reported fastest predecessors in mm/s and BL/s, respectively, in literature. An in-plane prestressed hair clip mechanism (HCM) made up of semi-rigid materials like plastic is used as the supporting chassis, the compliant spine, and the muscle force amplifier of the robot at the same time, enabling the robot to be rapid and strong. The influence of factors including actuation frequency, substrates, tethering/untethering, and symmetric/asymmetric actuation is explored with experiments. Based on previous work, this paper further demonstrated the potential of HCM in addressing the speed problem of soft robots.
In-plane prestressed hair clip mechanism for the fastest untethered compliant fish robot
Jul 18, 2022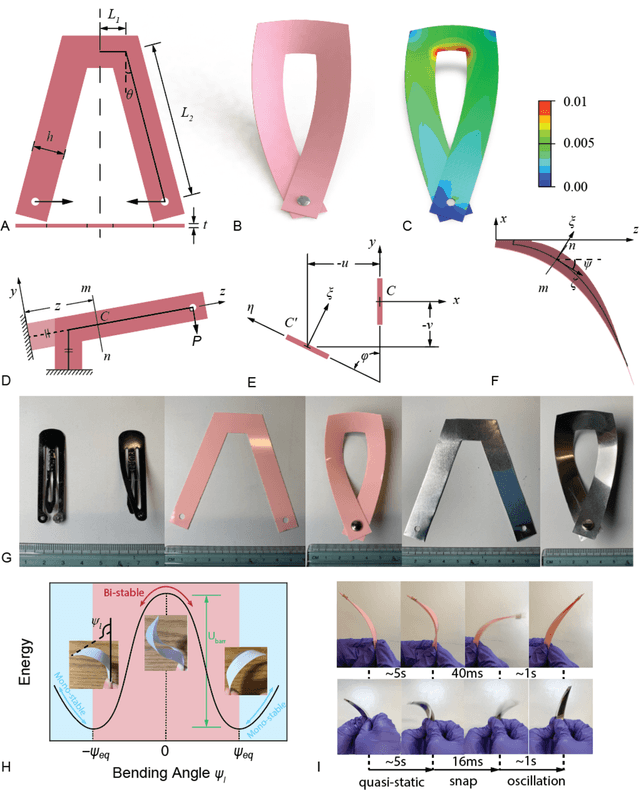

A trend has emerged over the past decades pointing to the harnessing of structural instability in movable, programmable, and transformable mechanisms. Inspired by a steel hair clip, we combine the in-plane assembly with a bistable structure and build a compliant flapping mechanism using semi-rigid plastic sheets and installed it on both a tethered pneumatic soft robotic fish and an untethered motor-driven one to demonstrate its unprecedented advantages. Designing rules are proposed following the theories and verification. A two-fold increase in the swimming speed of the pneumatic fish compared to the reference is observed and the further study of the untether fish demonstrates a record-breaking velocity of 2.03 BL/s (43.6 cm/s) for the untethered compliant swimmer, outperforming the previously report fastest one with a significant margin of 194%. This work probably heralds a structural revolution for next-generation compliant robotics.
Equivariant Point Cloud Analysis via Learning Orientations for Message Passing
Mar 28, 2022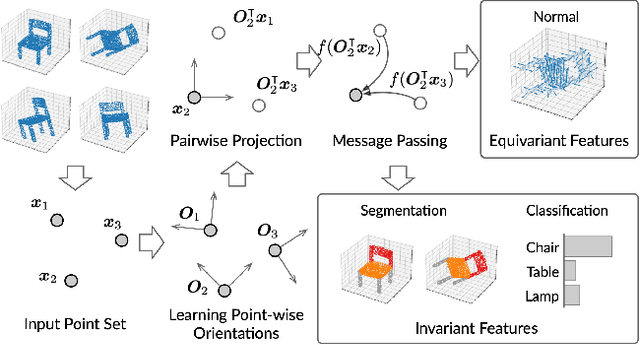
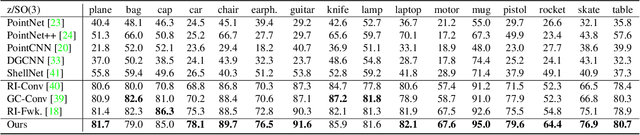
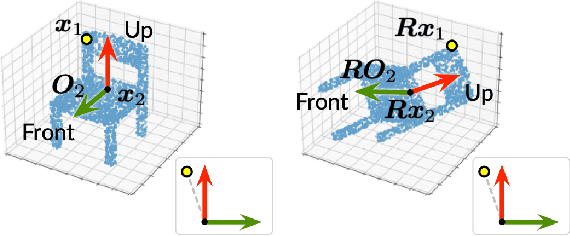
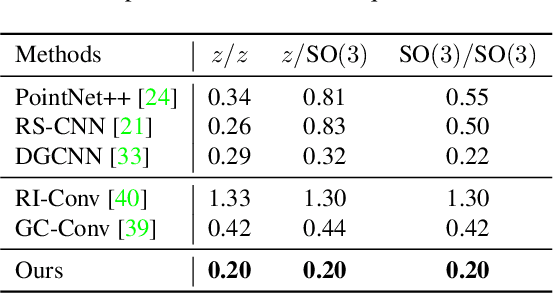
Equivariance has been a long-standing concern in various fields ranging from computer vision to physical modeling. Most previous methods struggle with generality, simplicity, and expressiveness -- some are designed ad hoc for specific data types, some are too complex to be accessible, and some sacrifice flexible transformations. In this work, we propose a novel and simple framework to achieve equivariance for point cloud analysis based on the message passing (graph neural network) scheme. We find the equivariant property could be obtained by introducing an orientation for each point to decouple the relative position for each point from the global pose of the entire point cloud. Therefore, we extend current message passing networks with a module that learns orientations for each point. Before aggregating information from the neighbors of a point, the networks transforms the neighbors' coordinates based on the point's learned orientations. We provide formal proofs to show the equivariance of the proposed framework. Empirically, we demonstrate that our proposed method is competitive on both point cloud analysis and physical modeling tasks. Code is available at https://github.com/luost26/Equivariant-OrientedMP .