 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIn-plane prestressed hair clip mechanism for the fastest untethered compliant fish robot
Jul 18, 2022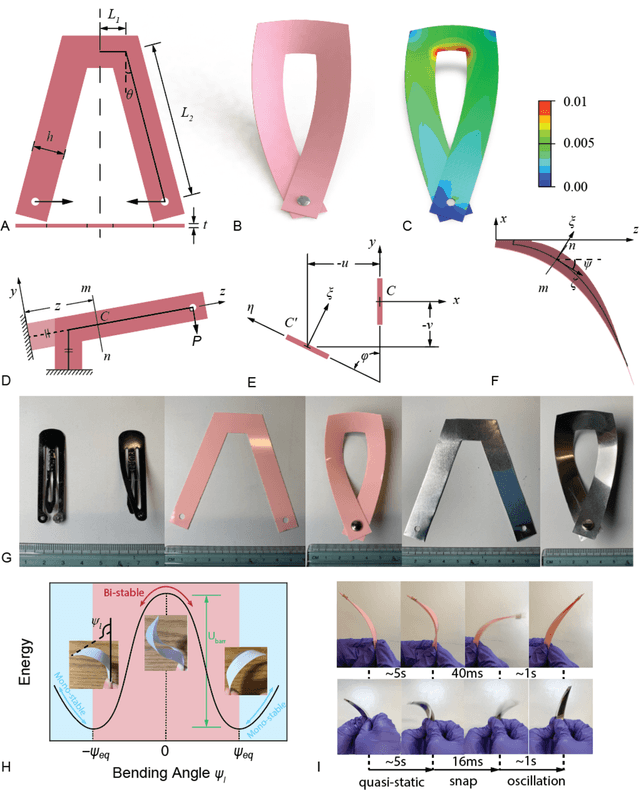
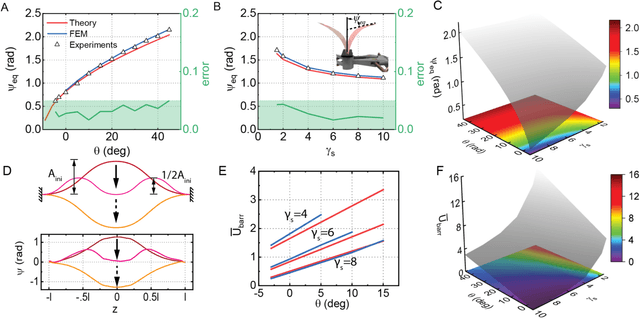

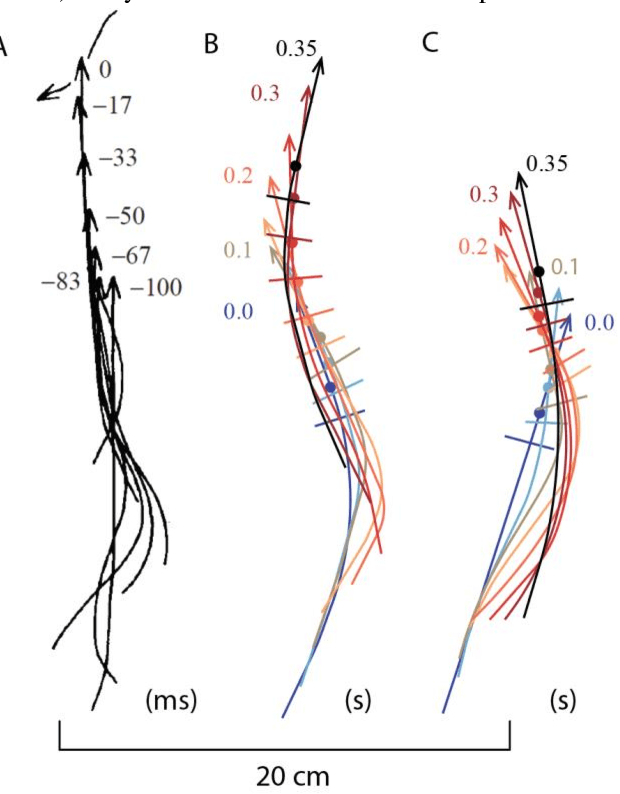
A trend has emerged over the past decades pointing to the harnessing of structural instability in movable, programmable, and transformable mechanisms. Inspired by a steel hair clip, we combine the in-plane assembly with a bistable structure and build a compliant flapping mechanism using semi-rigid plastic sheets and installed it on both a tethered pneumatic soft robotic fish and an untethered motor-driven one to demonstrate its unprecedented advantages. Designing rules are proposed following the theories and verification. A two-fold increase in the swimming speed of the pneumatic fish compared to the reference is observed and the further study of the untether fish demonstrates a record-breaking velocity of 2.03 BL/s (43.6 cm/s) for the untethered compliant swimmer, outperforming the previously report fastest one with a significant margin of 194%. This work probably heralds a structural revolution for next-generation compliant robotics.
In-plane prestressing: Inspiration from a hair clip
Jun 29, 2022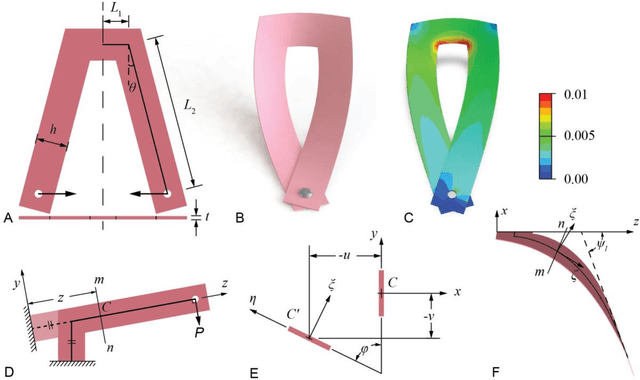
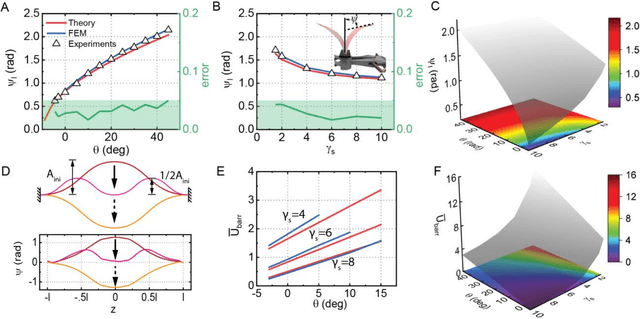
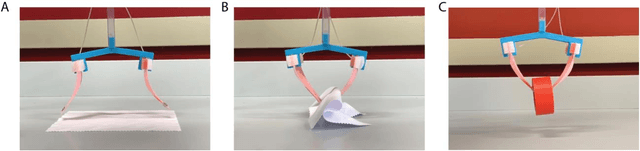
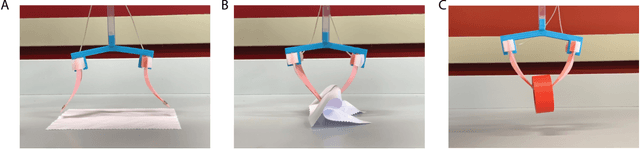
Structural instability is a hazard that leads to catastrophic failure and is generally avoided through special designs. A trend, however, has emerged over the past decades pointing to the harnessing of mechanisms with instability. Inspired by the snapping of a hair clip, we are finessing the unique characteristics of the lateral-torsional buckling of beams and the snap-through of pre-buckled dome-like thin-wall structures in a new field: the in-plane prestressed mechanism. Analyses reveal how the 2D-3D assembly of an in-plane prestressed actuator (IPA) is achieved and how the post-buckling energy landscape is pictured. Combining them with soft robotics, we show that the inclusion of a bistable IPA can enormously enhance the performance of an underwater fish robot as well as inspire a finger-like soft gripper.