 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEverAnimate: Minute-Scale Human Animation via Latent Flow Restoration
May 14, 2026We propose EverAnimate, an efficient post-training method for long-horizon animated video generation that preserves visual quality and character identity. Long-form animation remains challenging because highly dynamic human motion must be synthesized against relatively static environments, making chunk-based generation prone to accumulated drift: (i) low-level quality drift, such as progressive degradation of static backgrounds, and (ii) high-level semantic drift, such as inconsistent character identity and view-dependent attributes. To address this issue, EverAnimate restores drifted flow trajectories by anchoring generation to a persistent latent context memory, consisting of two complementary mechanisms. (i) Persistent Latent Propagation maintains a context memory across chunks to propagate identity and motion in latent space while mitigating temporal forgetting. (ii) Restorative Flow Matching introduces an implicit restoration objective during sampling through velocity adjustment, improving within-chunk fidelity. With only lightweight LoRA tuning, EverAnimate outperforms state-of-the-art long-animation methods in both short- and long-horizon settings: at 10 seconds, it improves PSNR/SSIM by 8%/7% and reduces LPIPS/FID by 22%/11%; at 90 seconds, the gains increase to 15%/15% and 32%/27%, respectively.
Grounded World Model for Semantically Generalizable Planning
Apr 13, 2026In Model Predictive Control (MPC), world models predict the future outcomes of various action proposals, which are then scored to guide the selection of the optimal action. For visuomotor MPC, the score function is a distance metric between a predicted image and a goal image, measured in the latent space of a pretrained vision encoder like DINO and JEPA. However, it is challenging to obtain the goal image in advance of the task execution, particularly in new environments. Additionally, conveying the goal through an image offers limited interactivity compared with natural language. In this work, we propose to learn a Grounded World Model (GWM) in a vision-language-aligned latent space. As a result, each proposed action is scored based on how close its future outcome is to the task instruction, reflected by the similarity of embeddings. This approach transforms the visuomotor MPC to a VLA that surpasses VLM-based VLAs in semantic generalization. On the proposed WISER benchmark, GWM-MPC achieves a 87% success rate on the test set comprising 288 tasks that feature unseen visual signals and referring expressions, yet remain solvable with motions demonstrated during training. In contrast, traditional VLAs achieve an average success rate of 22%, even though they overfit the training set with a 90% success rate.
RAP: 3D Rasterization Augmented End-to-End Planning
Oct 05, 2025Imitation learning for end-to-end driving trains policies only on expert demonstrations. Once deployed in a closed loop, such policies lack recovery data: small mistakes cannot be corrected and quickly compound into failures. A promising direction is to generate alternative viewpoints and trajectories beyond the logged path. Prior work explores photorealistic digital twins via neural rendering or game engines, but these methods are prohibitively slow and costly, and thus mainly used for evaluation. In this work, we argue that photorealism is unnecessary for training end-to-end planners. What matters is semantic fidelity and scalability: driving depends on geometry and dynamics, not textures or lighting. Motivated by this, we propose 3D Rasterization, which replaces costly rendering with lightweight rasterization of annotated primitives, enabling augmentations such as counterfactual recovery maneuvers and cross-agent view synthesis. To transfer these synthetic views effectively to real-world deployment, we introduce a Raster-to-Real feature-space alignment that bridges the sim-to-real gap. Together, these components form Rasterization Augmented Planning (RAP), a scalable data augmentation pipeline for planning. RAP achieves state-of-the-art closed-loop robustness and long-tail generalization, ranking first on four major benchmarks: NAVSIM v1/v2, Waymo Open Dataset Vision-based E2E Driving, and Bench2Drive. Our results show that lightweight rasterization with feature alignment suffices to scale E2E training, offering a practical alternative to photorealistic rendering. Project page: https://alan-lanfeng.github.io/RAP/.
OmniTraj: Pre-Training on Heterogeneous Data for Adaptive and Zero-Shot Human Trajectory Prediction
Jul 31, 2025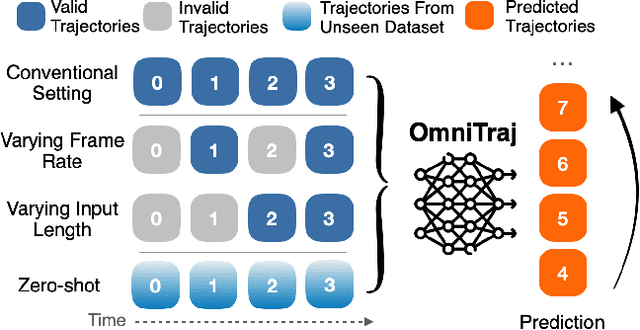
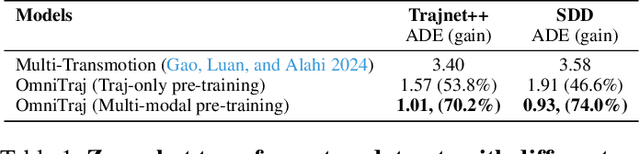
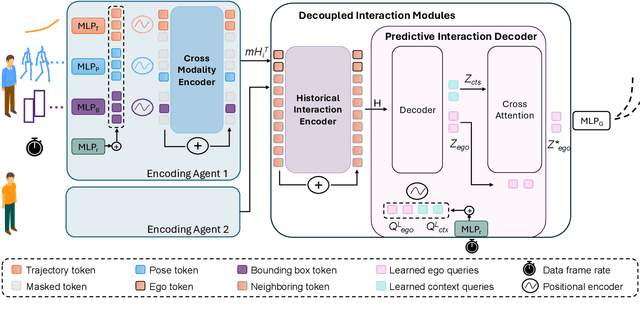
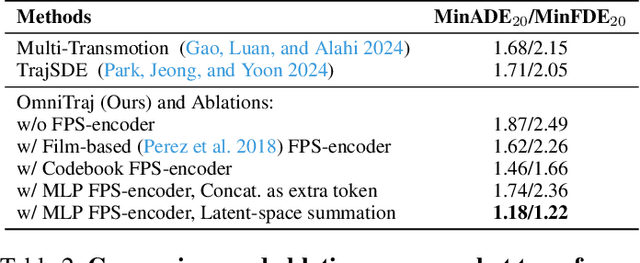
While large-scale pre-training has advanced human trajectory prediction, a critical challenge remains: zero-shot transfer to unseen dataset with varying temporal dynamics. State-of-the-art pre-trained models often require fine-tuning to adapt to new datasets with different frame rates or observation horizons, limiting their scalability and practical utility. In this work, we systematically investigate this limitation and propose a robust solution. We first demonstrate that existing data-aware discrete models struggle when transferred to new scenarios with shifted temporal setups. We then isolate the temporal generalization from dataset shift, revealing that a simple, explicit conditioning mechanism for temporal metadata is a highly effective solution. Based on this insight, we present OmniTraj, a Transformer-based model pre-trained on a large-scale, heterogeneous dataset. Our experiments show that explicitly conditioning on the frame rate enables OmniTraj to achieve state-of-the-art zero-shot transfer performance, reducing prediction error by over 70\% in challenging cross-setup scenarios. After fine-tuning, OmniTraj achieves state-of-the-art results on four datasets, including NBA, JTA, WorldPose, and ETH-UCY. The code is publicly available: https://github.com/vita-epfl/omnitraj
Weak-for-Strong: Training Weak Meta-Agent to Harness Strong Executors
Apr 07, 2025Efficiently leveraging of the capabilities of contemporary large language models (LLMs) is increasingly challenging, particularly when direct fine-tuning is expensive and often impractical. Existing training-free methods, including manually or automated designed workflows, typically demand substantial human effort or yield suboptimal results. This paper proposes Weak-for-Strong Harnessing (W4S), a novel framework that customizes smaller, cost-efficient language models to design and optimize workflows for harnessing stronger models. W4S formulates workflow design as a multi-turn markov decision process and introduces reinforcement learning for agentic workflow optimization (RLAO) to train a weak meta-agent. Through iterative interaction with the environment, the meta-agent learns to design increasingly effective workflows without manual intervention. Empirical results demonstrate the superiority of W4S that our 7B meta-agent, trained with just one GPU hour, outperforms the strongest baseline by 2.9% ~ 24.6% across eleven benchmarks, successfully elevating the performance of state-of-the-art models such as GPT-3.5-Turbo and GPT-4o. Notably, W4S exhibits strong generalization capabilities across both seen and unseen tasks, offering an efficient, high-performing alternative to directly fine-tuning strong models.
TAROT: Targeted Data Selection via Optimal Transport
Nov 30, 2024



We propose TAROT, a targeted data selection framework grounded in optimal transport theory. Previous targeted data selection methods primarily rely on influence-based greedy heuristics to enhance domain-specific performance. While effective on limited, unimodal data (i.e., data following a single pattern), these methods struggle as target data complexity increases. Specifically, in multimodal distributions, these heuristics fail to account for multiple inherent patterns, leading to suboptimal data selection. This work identifies two primary factors contributing to this limitation: (i) the disproportionate impact of dominant feature components in high-dimensional influence estimation, and (ii) the restrictive linear additive assumptions inherent in greedy selection strategies. To address these challenges, TAROT incorporates whitened feature distance to mitigate dominant feature bias, providing a more reliable measure of data influence. Building on this, TAROT uses whitened feature distance to quantify and minimize the optimal transport distance between the selected data and target domains. Notably, this minimization also facilitates the estimation of optimal selection ratios. We evaluate TAROT across multiple tasks, including semantic segmentation, motion prediction, and instruction tuning. Results consistently show that TAROT outperforms state-of-the-art methods, highlighting its versatility across various deep learning tasks. Code is available at https://github.com/vita-epfl/TAROT.
UniTraj: A Unified Framework for Scalable Vehicle Trajectory Prediction
Mar 27, 2024Vehicle trajectory prediction has increasingly relied on data-driven solutions, but their ability to scale to different data domains and the impact of larger dataset sizes on their generalization remain under-explored. While these questions can be studied by employing multiple datasets, it is challenging due to several discrepancies, e.g., in data formats, map resolution, and semantic annotation types. To address these challenges, we introduce UniTraj, a comprehensive framework that unifies various datasets, models, and evaluation criteria, presenting new opportunities for the vehicle trajectory prediction field. In particular, using UniTraj, we conduct extensive experiments and find that model performance significantly drops when transferred to other datasets. However, enlarging data size and diversity can substantially improve performance, leading to a new state-of-the-art result for the nuScenes dataset. We provide insights into dataset characteristics to explain these findings. The code can be found here: https://github.com/vita-epfl/UniTraj
SynH2R: Synthesizing Hand-Object Motions for Learning Human-to-Robot Handovers
Nov 09, 2023Vision-based human-to-robot handover is an important and challenging task in human-robot interaction. Recent work has attempted to train robot policies by interacting with dynamic virtual humans in simulated environments, where the policies can later be transferred to the real world. However, a major bottleneck is the reliance on human motion capture data, which is expensive to acquire and difficult to scale to arbitrary objects and human grasping motions. In this paper, we introduce a framework that can generate plausible human grasping motions suitable for training the robot. To achieve this, we propose a hand-object synthesis method that is designed to generate handover-friendly motions similar to humans. This allows us to generate synthetic training and testing data with 100x more objects than previous work. In our experiments, we show that our method trained purely with synthetic data is competitive with state-of-the-art methods that rely on real human motion data both in simulation and on a real system. In addition, we can perform evaluations on a larger scale compared to prior work. With our newly introduced test set, we show that our model can better scale to a large variety of unseen objects and human motions compared to the baselines. Project page: https://eth-ait.github.io/synthetic-handovers/
ScenarioNet: Open-Source Platform for Large-Scale Traffic Scenario Simulation and Modeling
Jul 02, 2023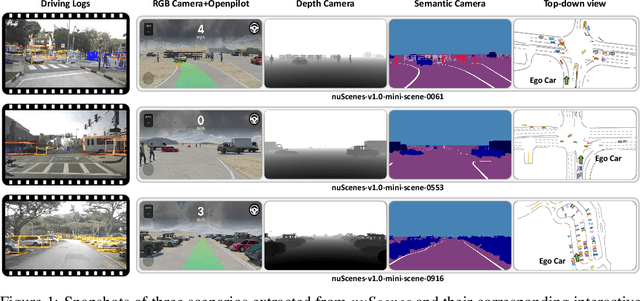
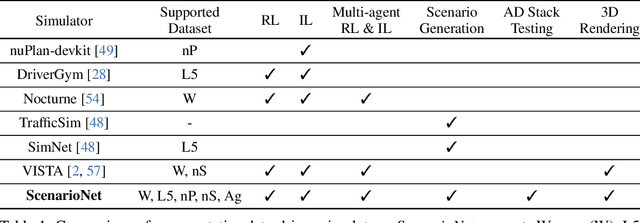
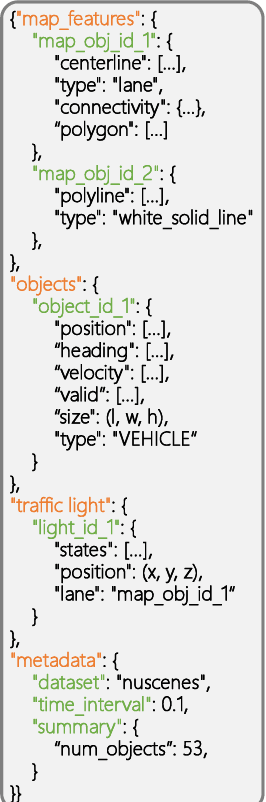
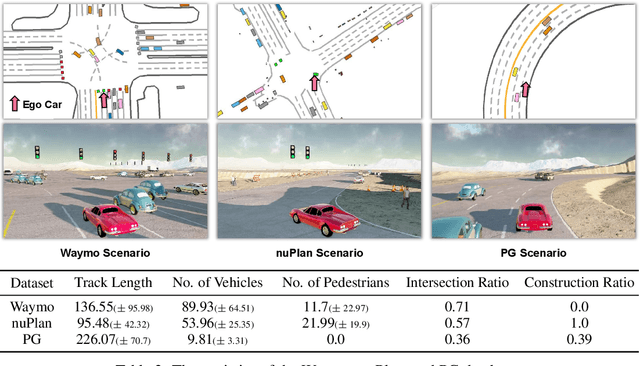
Large-scale driving datasets such as Waymo Open Dataset and nuScenes substantially accelerate autonomous driving research, especially for perception tasks such as 3D detection and trajectory forecasting. Since the driving logs in these datasets contain HD maps and detailed object annotations which accurately reflect the real-world complexity of traffic behaviors, we can harvest a massive number of complex traffic scenarios and recreate their digital twins in simulation. Compared to the hand-crafted scenarios often used in existing simulators, data-driven scenarios collected from the real world can facilitate many research opportunities in machine learning and autonomous driving. In this work, we present ScenarioNet, an open-source platform for large-scale traffic scenario modeling and simulation. ScenarioNet defines a unified scenario description format and collects a large-scale repository of real-world traffic scenarios from the heterogeneous data in various driving datasets including Waymo, nuScenes, Lyft L5, and nuPlan datasets. These scenarios can be further replayed and interacted with in multiple views from Bird-Eye-View layout to realistic 3D rendering in MetaDrive simulator. This provides a benchmark for evaluating the safety of autonomous driving stacks in simulation before their real-world deployment. We further demonstrate the strengths of ScenarioNet on large-scale scenario generation, imitation learning, and reinforcement learning in both single-agent and multi-agent settings. Code, demo videos, and website are available at https://metadriverse.github.io/scenarionet.
TrafficGen: Learning to Generate Diverse and Realistic Traffic Scenarios
Oct 12, 2022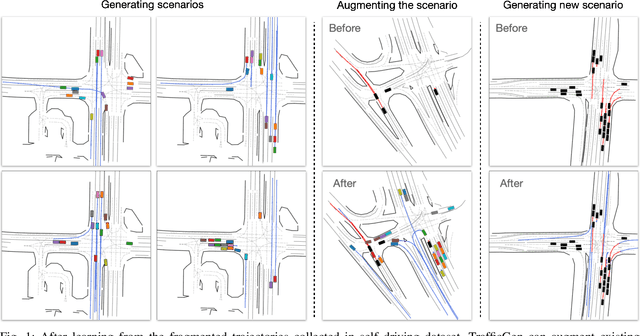
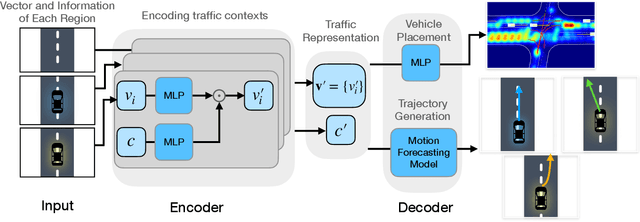
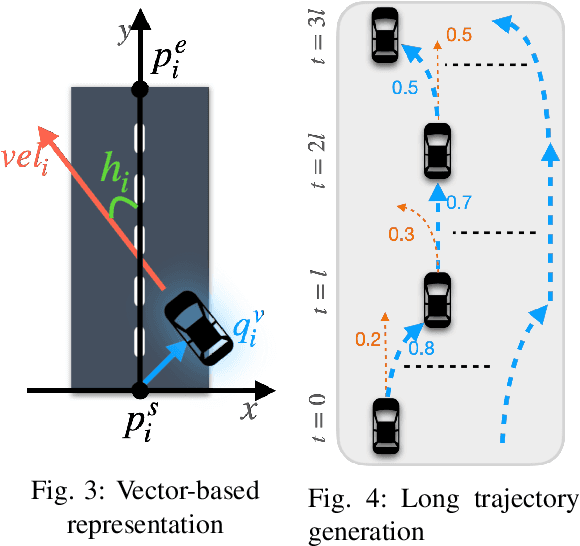
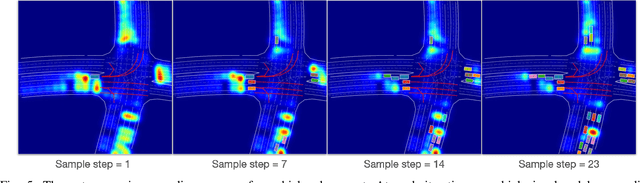
Diverse and realistic traffic scenarios are crucial for evaluating the AI safety of autonomous driving systems in simulation. This work introduces a data-driven method called TrafficGen for traffic scenario generation. It learns from the fragmented human driving data collected in the real world and then can generate realistic traffic scenarios. TrafficGen is an autoregressive generative model with an encoder-decoder architecture. In each autoregressive iteration, it first encodes the current traffic context with the attention mechanism and then decodes a vehicle's initial state followed by generating its long trajectory. We evaluate the trained model in terms of vehicle placement and trajectories and show substantial improvements over baselines. TrafficGen can be also used to augment existing traffic scenarios, by adding new vehicles and extending the fragmented trajectories. We further demonstrate that importing the generated scenarios into a simulator as interactive training environments improves the performance and the safety of driving policy learned from reinforcement learning. More project resource is available at https://metadriverse.github.io/trafficgen