 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScenarioNet: Open-Source Platform for Large-Scale Traffic Scenario Simulation and Modeling
Paper and Code
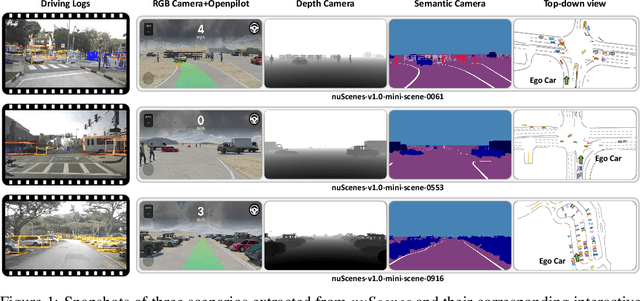
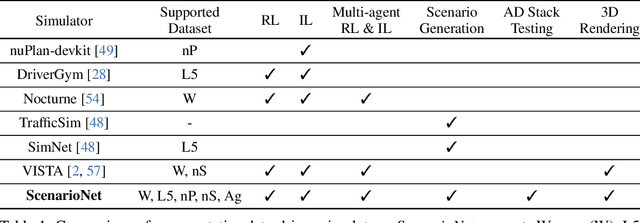
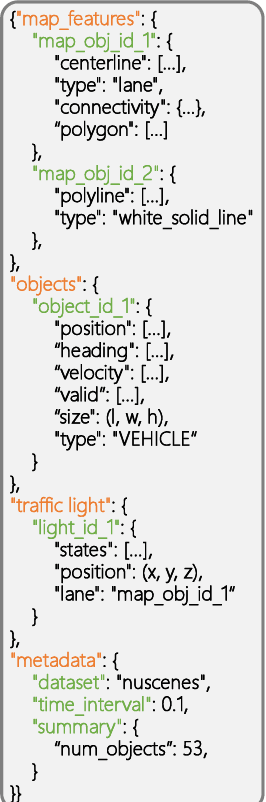
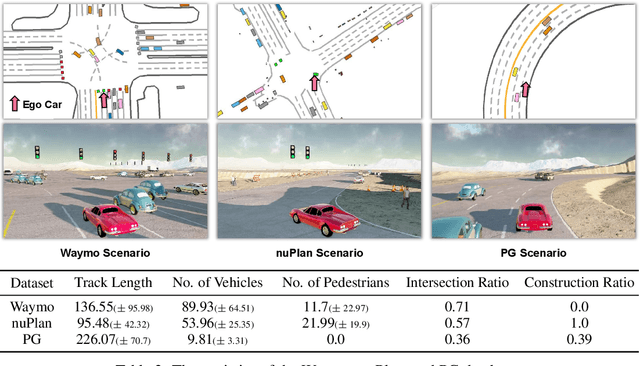
Large-scale driving datasets such as Waymo Open Dataset and nuScenes substantially accelerate autonomous driving research, especially for perception tasks such as 3D detection and trajectory forecasting. Since the driving logs in these datasets contain HD maps and detailed object annotations which accurately reflect the real-world complexity of traffic behaviors, we can harvest a massive number of complex traffic scenarios and recreate their digital twins in simulation. Compared to the hand-crafted scenarios often used in existing simulators, data-driven scenarios collected from the real world can facilitate many research opportunities in machine learning and autonomous driving. In this work, we present ScenarioNet, an open-source platform for large-scale traffic scenario modeling and simulation. ScenarioNet defines a unified scenario description format and collects a large-scale repository of real-world traffic scenarios from the heterogeneous data in various driving datasets including Waymo, nuScenes, Lyft L5, and nuPlan datasets. These scenarios can be further replayed and interacted with in multiple views from Bird-Eye-View layout to realistic 3D rendering in MetaDrive simulator. This provides a benchmark for evaluating the safety of autonomous driving stacks in simulation before their real-world deployment. We further demonstrate the strengths of ScenarioNet on large-scale scenario generation, imitation learning, and reinforcement learning in both single-agent and multi-agent settings. Code, demo videos, and website are available at https://metadriverse.github.io/scenarionet.