 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniTraj: A Unified Framework for Scalable Vehicle Trajectory Prediction
Mar 27, 2024Vehicle trajectory prediction has increasingly relied on data-driven solutions, but their ability to scale to different data domains and the impact of larger dataset sizes on their generalization remain under-explored. While these questions can be studied by employing multiple datasets, it is challenging due to several discrepancies, e.g., in data formats, map resolution, and semantic annotation types. To address these challenges, we introduce UniTraj, a comprehensive framework that unifies various datasets, models, and evaluation criteria, presenting new opportunities for the vehicle trajectory prediction field. In particular, using UniTraj, we conduct extensive experiments and find that model performance significantly drops when transferred to other datasets. However, enlarging data size and diversity can substantially improve performance, leading to a new state-of-the-art result for the nuScenes dataset. We provide insights into dataset characteristics to explain these findings. The code can be found here: https://github.com/vita-epfl/UniTraj
Certified Human Trajectory Prediction
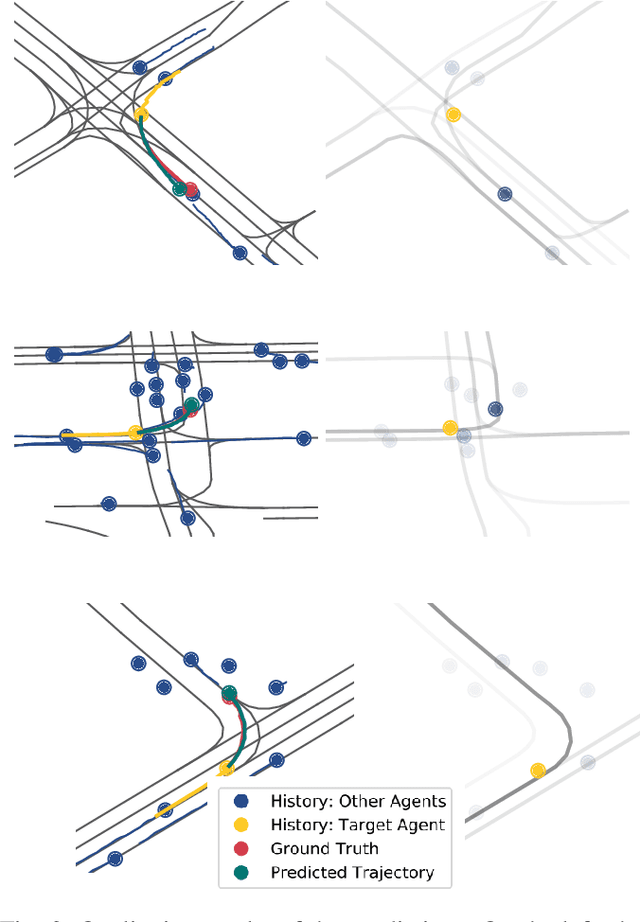
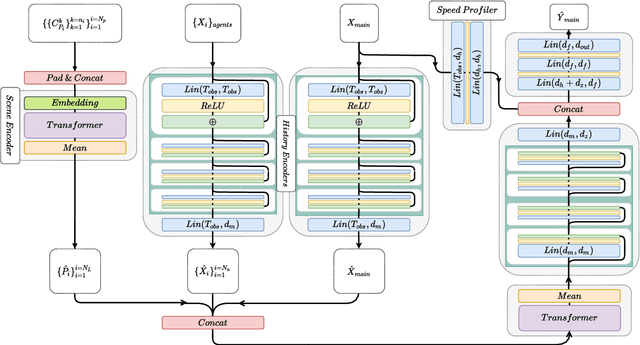
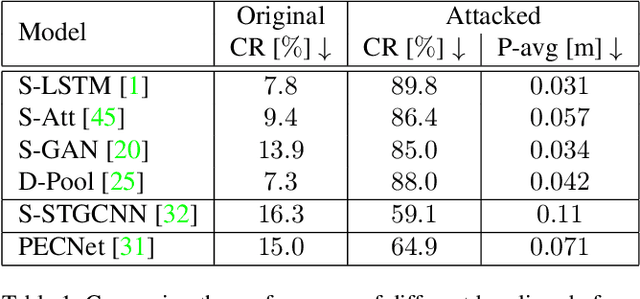
Mar 20, 2024Trajectory prediction plays an essential role in autonomous vehicles. While numerous strategies have been developed to enhance the robustness of trajectory prediction models, these methods are predominantly heuristic and do not offer guaranteed robustness against adversarial attacks and noisy observations. In this work, we propose a certification approach tailored for the task of trajectory prediction. To this end, we address the inherent challenges associated with trajectory prediction, including unbounded outputs, and mutli-modality, resulting in a model that provides guaranteed robustness. Furthermore, we integrate a denoiser into our method to further improve the performance. Through comprehensive evaluations, we demonstrate the effectiveness of the proposed technique across various baselines and using standard trajectory prediction datasets. The code will be made available online: https://s-attack.github.io/
Causal Imitative Model for Autonomous Driving
Dec 07, 2021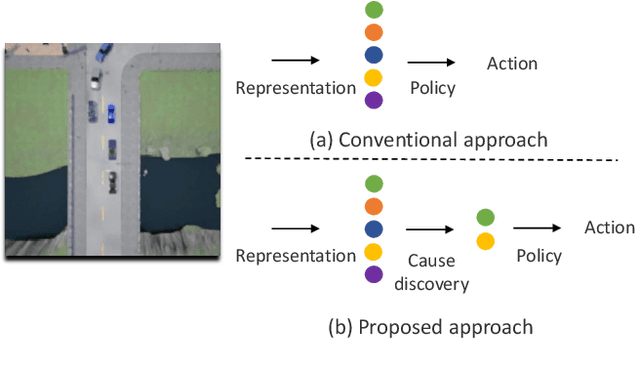
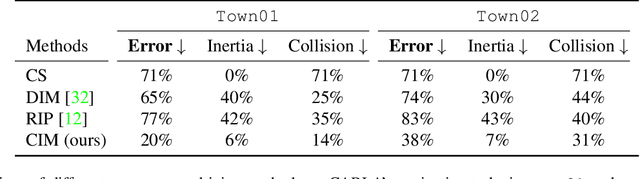
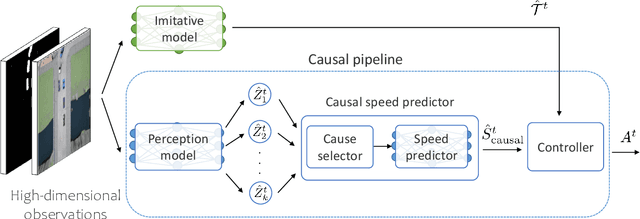
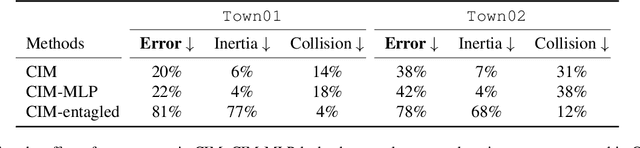
Imitation learning is a powerful approach for learning autonomous driving policy by leveraging data from expert driver demonstrations. However, driving policies trained via imitation learning that neglect the causal structure of expert demonstrations yield two undesirable behaviors: inertia and collision. In this paper, we propose Causal Imitative Model (CIM) to address inertia and collision problems. CIM explicitly discovers the causal model and utilizes it to train the policy. Specifically, CIM disentangles the input to a set of latent variables, selects the causal variables, and determines the next position by leveraging the selected variables. Our experiments show that our method outperforms previous work in terms of inertia and collision rates. Moreover, thanks to exploiting the causal structure, CIM shrinks the input dimension to only two, hence, can adapt to new environments in a few-shot setting. Code is available at https://github.com/vita-epfl/CIM.
Vehicle trajectory prediction works, but not everywhere
Dec 07, 2021


Vehicle trajectory prediction is nowadays a fundamental pillar of self-driving cars. Both the industry and research communities have acknowledged the need for such a pillar by running public benchmarks. While state-of-the-art methods are impressive, i.e., they have no off-road prediction, their generalization to cities outside of the benchmark is unknown. In this work, we show that those methods do not generalize to new scenes. We present a novel method that automatically generates realistic scenes that cause state-of-the-art models go off-road. We frame the problem through the lens of adversarial scene generation. We promote a simple yet effective generative model based on atomic scene generation functions along with physical constraints. Our experiments show that more than $60\%$ of the existing scenes from the current benchmarks can be modified in a way to make prediction methods fail (predicting off-road). We further show that (i) the generated scenes are realistic since they do exist in the real world, and (ii) can be used to make existing models robust by 30-40%. Code is available at https://s-attack.github.io/.
SVG-Net: An SVG-based Trajectory Prediction Model
Oct 11, 2021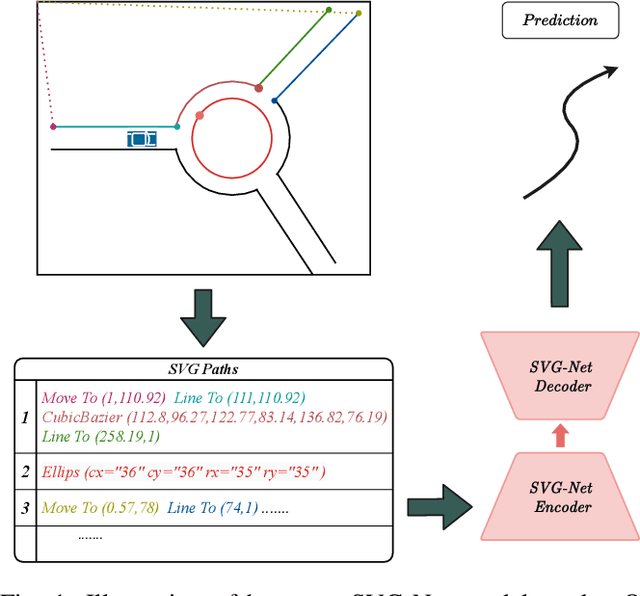
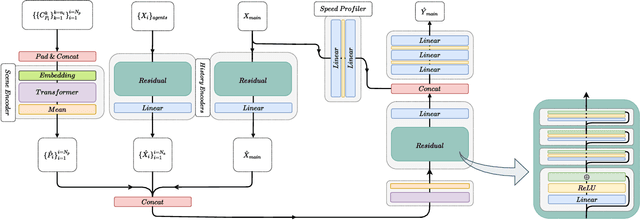
Anticipating motions of vehicles in a scene is an essential problem for safe autonomous driving systems. To this end, the comprehension of the scene's infrastructure is often the main clue for predicting future trajectories. Most of the proposed approaches represent the scene with a rasterized format and some of the more recent approaches leverage custom vectorized formats. In contrast, we propose representing the scene's information by employing Scalable Vector Graphics (SVG). SVG is a well-established format that matches the problem of trajectory prediction better than rasterized formats while being more general than arbitrary vectorized formats. SVG has the potential to provide the convenience and generality of raster-based solutions if coupled with a powerful tool such as CNNs, for which we introduce SVG-Net. SVG-Net is a Transformer-based Neural Network that can effectively capture the scene's information from SVG inputs. Thanks to the self-attention mechanism in its Transformers, SVG-Net can also adequately apprehend relations amongst the scene and the agents. We demonstrate SVG-Net's effectiveness by evaluating its performance on the publicly available Argoverse forecasting dataset. Finally, we illustrate how, by using SVG, one can benefit from datasets and advancements in other research fronts that also utilize the same input format. Our code is available at https://vita-epfl.github.io/SVGNet/.
Are socially-aware trajectory prediction models really socially-aware?
Aug 24, 2021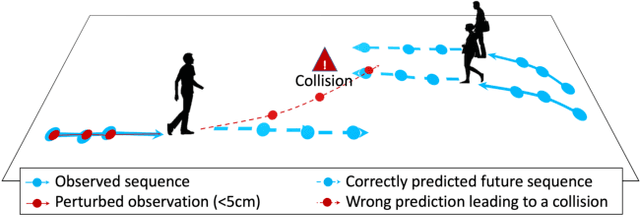
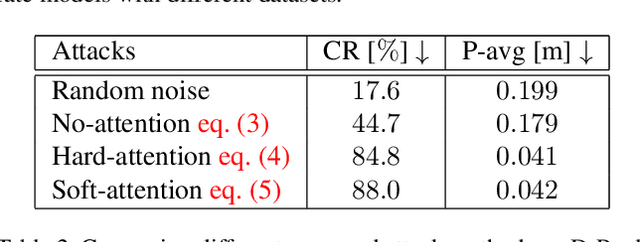

Our field has recently witnessed an arms race of neural network-based trajectory predictors. While these predictors are at the core of many applications such as autonomous navigation or pedestrian flow simulations, their adversarial robustness has not been carefully studied. In this paper, we introduce a socially-attended attack to assess the social understanding of prediction models in terms of collision avoidance. An attack is a small yet carefully-crafted perturbations to fail predictors. Technically, we define collision as a failure mode of the output, and propose hard- and soft-attention mechanisms to guide our attack. Thanks to our attack, we shed light on the limitations of the current models in terms of their social understanding. We demonstrate the strengths of our method on the recent trajectory prediction models. Finally, we show that our attack can be employed to increase the social understanding of state-of-the-art models. The code is available online: https://s-attack.github.io/
Injecting Knowledge in Data-driven Vehicle Trajectory Predictors
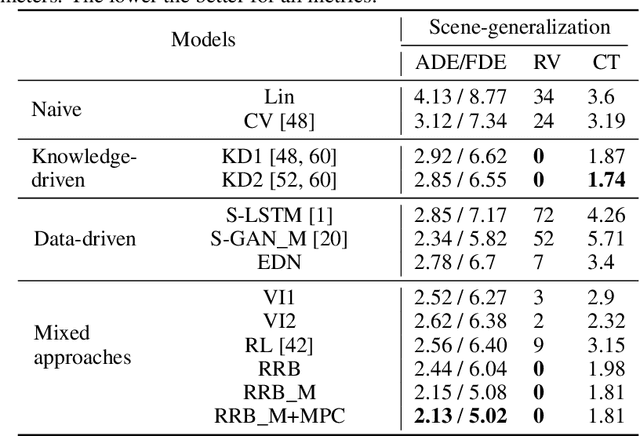
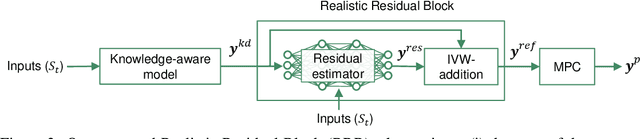
Mar 08, 2021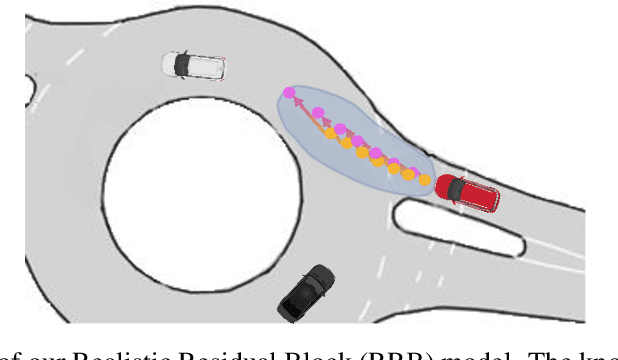
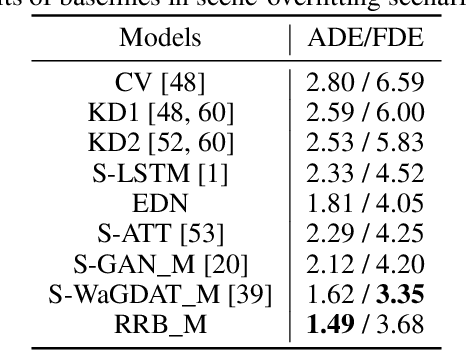
Vehicle trajectory prediction tasks have been commonly tackled from two distinct perspectives: either with knowledge-driven methods or more recently with data-driven ones. On the one hand, we can explicitly implement domain-knowledge or physical priors such as anticipating that vehicles will follow the middle of the roads. While this perspective leads to feasible outputs, it has limited performance due to the difficulty to hand-craft complex interactions in urban environments. On the other hand, recent works use data-driven approaches which can learn complex interactions from the data leading to superior performance. However, generalization, \textit{i.e.}, having accurate predictions on unseen data, is an issue leading to unrealistic outputs. In this paper, we propose to learn a "Realistic Residual Block" (RRB), which effectively connects these two perspectives. Our RRB takes any off-the-shelf knowledge-driven model and finds the required residuals to add to the knowledge-aware trajectory. Our proposed method outputs realistic predictions by confining the residual range and taking into account its uncertainty. We also constrain our output with Model Predictive Control (MPC) to satisfy kinematic constraints. Using a publicly available dataset, we show that our method outperforms previous works in terms of accuracy and generalization to new scenes. We will release our code and data split here: https://github.com/vita-epfl/RRB.