 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutomatic High-quality Verilog Assertion Generation through Subtask-Focused Fine-Tuned LLMs and Iterative Prompting
Nov 23, 2024



Formal Property Verification (FPV), using SystemVerilog Assertions (SVA), is crucial for ensuring the completeness of design with respect to the specification. However, writing SVA is a laborious task and has a steep learning curve. In this work, we present a large language model (LLM) -based flow to automatically generate high-quality SVA from the design specification documents, named \ToolName. We introduce a novel sub-task-focused fine-tuning approach that effectively addresses functionally incorrect assertions produced by baseline LLMs, leading to a remarkable 7.3-fold increase in the number of functionally correct assertions. Recognizing the prevalence of syntax and semantic errors, we also developed an iterative refinement method that enhances the LLM's initial outputs by systematically re-prompting it to correct identified issues. This process is further strengthened by a custom compiler that generates meaningful error messages, guiding the LLM towards improved accuracy. The experiments demonstrate a 26\% increase in the number of assertions free from syntax errors using this approach, showcasing its potential to streamline the FPV process.
ZOBNN: Zero-Overhead Dependable Design of Binary Neural Networks with Deliberately Quantized Parameters
Jul 06, 2024



Low-precision weights and activations in deep neural networks (DNNs) outperform their full-precision counterparts in terms of hardware efficiency. When implemented with low-precision operations, specifically in the extreme case where network parameters are binarized (i.e. BNNs), the two most frequently mentioned benefits of quantization are reduced memory consumption and a faster inference process. In this paper, we introduce a third advantage of very low-precision neural networks: improved fault-tolerance attribute. We investigate the impact of memory faults on state-of-the-art binary neural networks (BNNs) through comprehensive analysis. Despite the inclusion of floating-point parameters in BNN architectures to improve accuracy, our findings reveal that BNNs are highly sensitive to deviations in these parameters caused by memory faults. In light of this crucial finding, we propose a technique to improve BNN dependability by restricting the range of float parameters through a novel deliberately uniform quantization. The introduced quantization technique results in a reduction in the proportion of floating-point parameters utilized in the BNN, without incurring any additional computational overheads during the inference stage. The extensive experimental fault simulation on the proposed BNN architecture (i.e. ZOBNN) reveal a remarkable 5X enhancement in robustness compared to conventional floating-point DNN. Notably, this improvement is achieved without incurring any computational overhead. Crucially, this enhancement comes without computational overhead. \ToolName~excels in critical edge applications characterized by limited computational resources, prioritizing both dependability and real-time performance.
BDFA: A Blind Data Adversarial Bit-flip Attack on Deep Neural Networks
Jan 07, 2022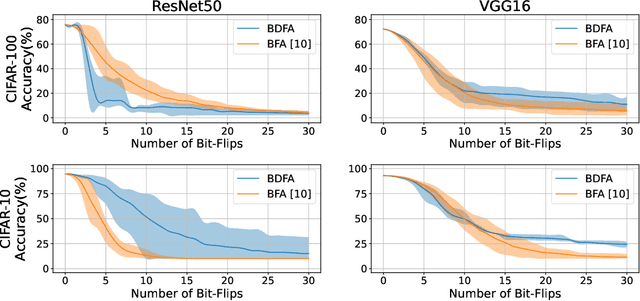
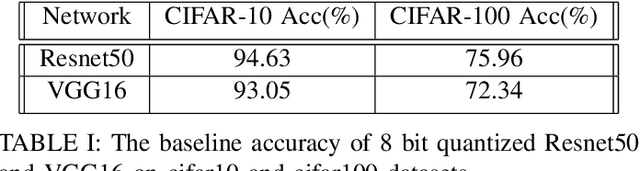
Adversarial bit-flip attack (BFA) on Neural Network weights can result in catastrophic accuracy degradation by flipping a very small number of bits. A major drawback of prior bit flip attack techniques is their reliance on test data. This is frequently not possible for applications that contain sensitive or proprietary data. In this paper, we propose Blind Data Adversarial Bit-flip Attack (BDFA), a novel technique to enable BFA without any access to the training or testing data. This is achieved by optimizing for a synthetic dataset, which is engineered to match the statistics of batch normalization across different layers of the network and the targeted label. Experimental results show that BDFA could decrease the accuracy of ResNet50 significantly from 75.96\% to 13.94\% with only 4 bits flips.
Vehicle trajectory prediction works, but not everywhere
Dec 07, 2021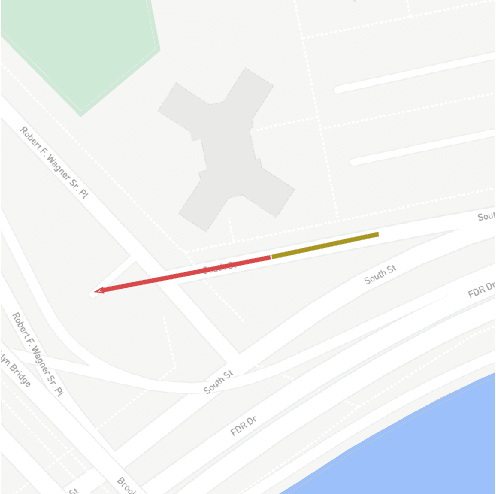

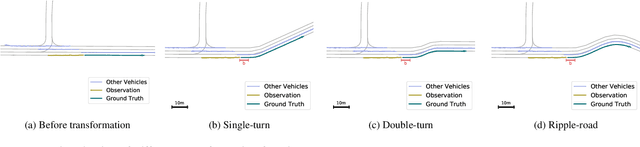

Vehicle trajectory prediction is nowadays a fundamental pillar of self-driving cars. Both the industry and research communities have acknowledged the need for such a pillar by running public benchmarks. While state-of-the-art methods are impressive, i.e., they have no off-road prediction, their generalization to cities outside of the benchmark is unknown. In this work, we show that those methods do not generalize to new scenes. We present a novel method that automatically generates realistic scenes that cause state-of-the-art models go off-road. We frame the problem through the lens of adversarial scene generation. We promote a simple yet effective generative model based on atomic scene generation functions along with physical constraints. Our experiments show that more than $60\%$ of the existing scenes from the current benchmarks can be modified in a way to make prediction methods fail (predicting off-road). We further show that (i) the generated scenes are realistic since they do exist in the real world, and (ii) can be used to make existing models robust by 30-40%. Code is available at https://s-attack.github.io/.