 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePost-LayerNorm Is Back: Stable, ExpressivE, and Deep
Jan 27, 2026Large language model (LLM) scaling is hitting a wall. Widening models yields diminishing returns, and extending context length does not improve fundamental expressivity. In contrast, depth scaling offers theoretically superior expressivity, yet current Transformer architectures struggle to train reliably at extreme depths. We revisit the Post-LayerNorm (Post-LN) formulation, whose instability at scale caused its replacement by Pre-LN in modern LLMs. We show that the central failure mode of Post-LN arises from the ResNet-style residual pathway, which introduces gradient vanishing in deep networks. We present Keel, a Post-LN Transformer that replaces this residual path with a Highway-style connection. This modification preserves the gradient flow through the residual branch, preventing signal vanishing from the top layers to the bottom. Unlike prior methods, Keel enables stable training at extreme depths without requiring specialized initialization or complex optimization tricks. Keel trains robustly at depths exceeding 1000 layers and consistently improves perplexity and depth-scaling characteristics over Pre-LN. These findings indicate that Post-LN, when paired with a Highway-style connection, provides a simple and effective foundation for building deeply scalable LLMs, opening the possibility for future infinite-depth architectures.
The World is Not Mono: Enabling Spatial Understanding in Large Audio-Language Models
Jan 06, 2026Existing large audio-language models perceive the world as "mono" -- a single stream of audio that ignores the critical spatial dimension ("where") required for universal acoustic scene analysis. To bridge this gap, we first introduce a hierarchical framework for Auditory Scene Analysis (ASA). Guided by this framework, we introduce a system that enables models like Qwen2-Audio to understand and reason about the complex acoustic world. Our framework achieves this through three core contributions: First, we build a large-scale, synthesized binaural audio dataset to provide the rich spatial cues. Second, we design a hybrid feature projector, which leverages parallel semantic and spatial encoders to extract decoupled representations. These distinct streams are integrated via a dense fusion mechanism, ensuring the model receives a holistic view of the acoustic scene. Finally, we employ a progressive training curriculum, advancing from supervised fine-tuning (SFT) to reinforcement learning via Group Relative Policy Optimization (GRPO), to explicitly evolve the model's capabilities towards reasoning. On our comprehensive benchmark, the model demonstrates comparatively strong capability for spatial understanding. By enabling this spatial perception, our work provides a clear pathway for leveraging the powerful reasoning abilities of large models towards holistic acoustic scene analysis, advancing from "mono" semantic recognition to spatial intelligence.
In-N-On: Scaling Egocentric Manipulation with in-the-wild and on-task Data
Nov 19, 2025Egocentric videos are a valuable and scalable data source to learn manipulation policies. However, due to significant data heterogeneity, most existing approaches utilize human data for simple pre-training, which does not unlock its full potential. This paper first provides a scalable recipe for collecting and using egocentric data by categorizing human data into two categories: in-the-wild and on-task alongside with systematic analysis on how to use the data. We first curate a dataset, PHSD, which contains over 1,000 hours of diverse in-the-wild egocentric data and over 20 hours of on-task data directly aligned to the target manipulation tasks. This enables learning a large egocentric language-conditioned flow matching policy, Human0. With domain adaptation techniques, Human0 minimizes the gap between humans and humanoids. Empirically, we show Human0 achieves several novel properties from scaling human data, including language following of instructions from only human data, few-shot learning, and improved robustness using on-task data. Project website: https://xiongyicai.github.io/In-N-On/
HMC: Learning Heterogeneous Meta-Control for Contact-Rich Loco-Manipulation
Nov 18, 2025



Learning from real-world robot demonstrations holds promise for interacting with complex real-world environments. However, the complexity and variability of interaction dynamics often cause purely positional controllers to struggle with contacts or varying payloads. To address this, we propose a Heterogeneous Meta-Control (HMC) framework for Loco-Manipulation that adaptively stitches multiple control modalities: position, impedance, and hybrid force-position. We first introduce an interface, HMC-Controller, for blending actions from different control profiles continuously in the torque space. HMC-Controller facilitates both teleoperation and policy deployment. Then, to learn a robust force-aware policy, we propose HMC-Policy to unify different controllers into a heterogeneous architecture. We adopt a mixture-of-experts style routing to learn from large-scale position-only data and fine-grained force-aware demonstrations. Experiments on a real humanoid robot show over 50% relative improvement vs. baselines on challenging tasks such as compliant table wiping and drawer opening, demonstrating the efficacy of HMC.
From Power to Precision: Learning Fine-grained Dexterity for Multi-fingered Robotic Hands
Nov 17, 2025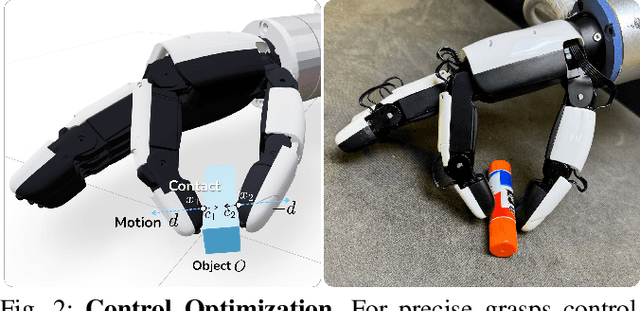

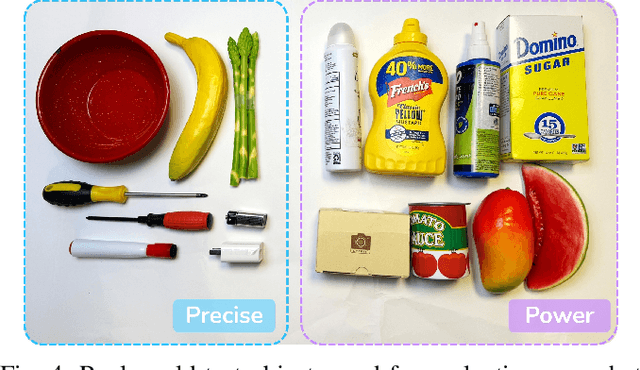
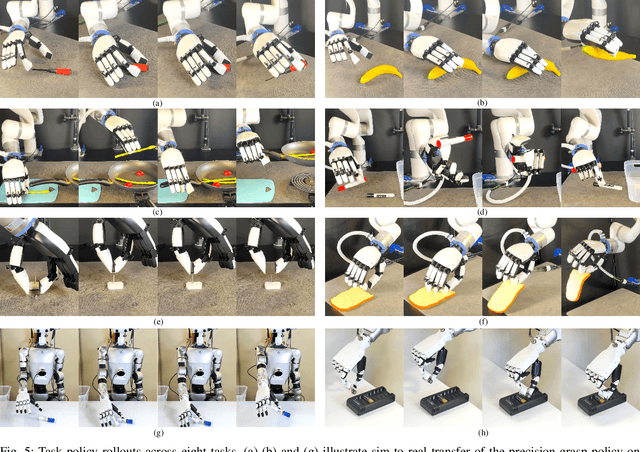
Human grasps can be roughly categorized into two types: power grasps and precision grasps. Precision grasping enables tool use and is believed to have influenced human evolution. Today's multi-fingered robotic hands are effective in power grasps, but for tasks requiring precision, parallel grippers are still more widely adopted. This contrast highlights a key limitation in current robotic hand design: the difficulty of achieving both stable power grasps and precise, fine-grained manipulation within a single, versatile system. In this work, we bridge this gap by jointly optimizing the control and hardware design of a multi-fingered dexterous hand, enabling both power and precision manipulation. Rather than redesigning the entire hand, we introduce a lightweight fingertip geometry modification, represent it as a contact plane, and jointly optimize its parameters along with the corresponding control. Our control strategy dynamically switches between power and precision manipulation and simplifies precision control into parallel thumb-index motions, which proves robust for sim-to-real transfer. On the design side, we leverage large-scale simulation to optimize the fingertip geometry using a differentiable neural-physics surrogate model. We validate our approach through extensive experiments in both sim-to-real and real-to-real settings. Our method achieves an 82.5% zero-shot success rate on unseen objects in sim-to-real precision grasping, and a 93.3% success rate in challenging real-world tasks involving bread pinching. These results demonstrate that our co-design framework can significantly enhance the fine-grained manipulation ability of multi-fingered hands without reducing their ability for power grasps. Our project page is at https://jianglongye.com/power-to-precision
Artificial Hippocampus Networks for Efficient Long-Context Modeling
Oct 08, 2025Long-sequence modeling faces a fundamental trade-off between the efficiency of compressive fixed-size memory in RNN-like models and the fidelity of lossless growing memory in attention-based Transformers. Inspired by the Multi-Store Model in cognitive science, we introduce a memory framework of artificial neural networks. Our method maintains a sliding window of the Transformer's KV cache as lossless short-term memory, while a learnable module termed Artificial Hippocampus Network (AHN) recurrently compresses out-of-window information into a fixed-size compact long-term memory. To validate this framework, we instantiate AHNs using modern RNN-like architectures, including Mamba2, DeltaNet, and Gated DeltaNet. Extensive experiments on long-context benchmarks LV-Eval and InfiniteBench demonstrate that AHN-augmented models consistently outperform sliding window baselines and achieve performance comparable or even superior to full-attention models, while substantially reducing computational and memory requirements. For instance, augmenting the Qwen2.5-3B-Instruct with AHNs reduces inference FLOPs by 40.5% and memory cache by 74.0%, while improving its average score on LV-Eval (128k sequence length) from 4.41 to 5.88. Code is available at: https://github.com/ByteDance-Seed/AHN.
Facet: highly efficient E(3)-equivariant networks for interatomic potentials
Sep 10, 2025Computational materials discovery is limited by the high cost of first-principles calculations. Machine learning (ML) potentials that predict energies from crystal structures are promising, but existing methods face computational bottlenecks. Steerable graph neural networks (GNNs) encode geometry with spherical harmonics, respecting atomic symmetries -- permutation, rotation, and translation -- for physically realistic predictions. Yet maintaining equivariance is difficult: activation functions must be modified, and each layer must handle multiple data types for different harmonic orders. We present Facet, a GNN architecture for efficient ML potentials, developed through systematic analysis of steerable GNNs. Our innovations include replacing expensive multi-layer perceptrons (MLPs) for interatomic distances with splines, which match performance while cutting computational and memory demands. We also introduce a general-purpose equivariant layer that mixes node information via spherical grid projection followed by standard MLPs -- faster than tensor products and more expressive than linear or gate layers. On the MPTrj dataset, Facet matches leading models with far fewer parameters and under 10% of their training compute. On a crystal relaxation task, it runs twice as fast as MACE models. We further show SevenNet-0's parameters can be reduced by over 25% with no accuracy loss. These techniques enable more than 10x faster training of large-scale foundation models for ML potentials, potentially reshaping computational materials discovery.
SASST: Leveraging Syntax-Aware Chunking and LLMs for Simultaneous Speech Translation
Aug 11, 2025This work proposes a grammar-based chunking strategy that segments input streams into semantically complete units by parsing dependency relations (e.g., noun phrase boundaries, verb-object structures) and punctuation features. The method ensures chunk coherence and minimizes semantic fragmentation. Building on this mechanism, we present SASST (Syntax-Aware Simultaneous Speech Translation), an end-to-end framework integrating frozen Whisper encoder and decoder-only LLM. The unified architecture dynamically outputs translation tokens or <WAIT> symbols to jointly optimize translation timing and content, with target-side reordering addressing word-order divergence. Experiments on CoVoST2 multilingual corpus En-{De, Zh, Ja} demonstrate significant translation quality improvements across languages and validate the effectiveness of syntactic structures in LLM-driven SimulST systems.
Polymorphism Crystal Structure Prediction with Adaptive Space Group Diversity Control
Jun 12, 2025Crystalline materials can form different structural arrangements (i.e. polymorphs) with the same chemical composition, exhibiting distinct physical properties depending on how they were synthesized or the conditions under which they operate. For example, carbon can exist as graphite (soft, conductive) or diamond (hard, insulating). Computational methods that can predict these polymorphs are vital in materials science, which help understand stability relationships, guide synthesis efforts, and discover new materials with desired properties without extensive trial-and-error experimentation. However, effective crystal structure prediction (CSP) algorithms for inorganic polymorph structures remain limited. We propose ParetoCSP2, a multi-objective genetic algorithm for polymorphism CSP that incorporates an adaptive space group diversity control technique, preventing over-representation of any single space group in the population guided by a neural network interatomic potential. Using an improved population initialization method and performing iterative structure relaxation, ParetoCSP2 not only alleviates premature convergence but also achieves improved convergence speed. Our results show that ParetoCSP2 achieves excellent performance in polymorphism prediction, including a nearly perfect space group and structural similarity accuracy for formulas with two polymorphs but with the same number of unit cell atoms. Evaluated on a benchmark dataset, it outperforms baseline algorithms by factors of 2.46-8.62 for these accuracies and improves by 44.8\%-87.04\% across key performance metrics for regular CSP. Our source code is freely available at https://github.com/usccolumbia/ParetoCSP2.
Vision Matters: Simple Visual Perturbations Can Boost Multimodal Math Reasoning
Jun 11, 2025Despite the rapid progress of multimodal large language models (MLLMs), they have largely overlooked the importance of visual processing. In a simple yet revealing experiment, we interestingly find that language-only models, when provided with image captions, can achieve comparable or even better performance than MLLMs that consume raw visual inputs. This suggests that current MLLMs may generate accurate visual descriptions but fail to effectively integrate them during reasoning. Motivated by this, we propose a simple visual perturbation framework that enhances perceptual robustness without requiring algorithmic modifications or additional training data. Our approach introduces three targeted perturbations: distractor concatenation, dominance-preserving mixup, and random rotation, that can be easily integrated into existing post-training pipelines including SFT, DPO, and GRPO. Through extensive experiments across multiple datasets, we demonstrate consistent improvements in mathematical reasoning performance, with gains comparable to those achieved through algorithmic changes. Additionally, we achieve competitive performance among open-source 7B RL-tuned models by training Qwen2.5-VL-7B with visual perturbation. Through comprehensive ablation studies, we analyze the effectiveness of different perturbation strategies, revealing that each perturbation type contributes uniquely to different aspects of visual reasoning. Our findings highlight the critical role of visual perturbation in multimodal mathematical reasoning: better reasoning begins with better seeing. Our code is available at https://github.com/YutingLi0606/Vision-Matters.