 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGuiding a Diffusion Transformer with the Internal Dynamics of Itself
Dec 30, 2025The diffusion model presents a powerful ability to capture the entire (conditional) data distribution. However, due to the lack of sufficient training and data to learn to cover low-probability areas, the model will be penalized for failing to generate high-quality images corresponding to these areas. To achieve better generation quality, guidance strategies such as classifier free guidance (CFG) can guide the samples to the high-probability areas during the sampling stage. However, the standard CFG often leads to over-simplified or distorted samples. On the other hand, the alternative line of guiding diffusion model with its bad version is limited by carefully designed degradation strategies, extra training and additional sampling steps. In this paper, we proposed a simple yet effective strategy Internal Guidance (IG), which introduces an auxiliary supervision on the intermediate layer during training process and extrapolates the intermediate and deep layer's outputs to obtain generative results during sampling process. This simple strategy yields significant improvements in both training efficiency and generation quality on various baselines. On ImageNet 256x256, SiT-XL/2+IG achieves FID=5.31 and FID=1.75 at 80 and 800 epochs. More impressively, LightningDiT-XL/1+IG achieves FID=1.34 which achieves a large margin between all of these methods. Combined with CFG, LightningDiT-XL/1+IG achieves the current state-of-the-art FID of 1.19.
Inductive Gradient Adjustment For Spectral Bias In Implicit Neural Representations
Oct 17, 2024



Implicit Neural Representations (INRs), as a versatile representation paradigm, have achieved success in various computer vision tasks. Due to the spectral bias of the vanilla multi-layer perceptrons (MLPs), existing methods focus on designing MLPs with sophisticated architectures or repurposing training techniques for highly accurate INRs. In this paper, we delve into the linear dynamics model of MLPs and theoretically identify the empirical Neural Tangent Kernel (eNTK) matrix as a reliable link between spectral bias and training dynamics. Based on eNTK matrix, we propose a practical inductive gradient adjustment method, which could purposefully improve the spectral bias via inductive generalization of eNTK-based gradient transformation matrix. We evaluate our method on different INRs tasks with various INR architectures and compare to existing training techniques. The superior representation performance clearly validates the advantage of our proposed method. Armed with our gradient adjustment method, better INRs with more enhanced texture details and sharpened edges can be learned from data by tailored improvements on spectral bias.
The RoboDrive Challenge: Drive Anytime Anywhere in Any Condition
May 14, 2024



In the realm of autonomous driving, robust perception under out-of-distribution conditions is paramount for the safe deployment of vehicles. Challenges such as adverse weather, sensor malfunctions, and environmental unpredictability can severely impact the performance of autonomous systems. The 2024 RoboDrive Challenge was crafted to propel the development of driving perception technologies that can withstand and adapt to these real-world variabilities. Focusing on four pivotal tasks -- BEV detection, map segmentation, semantic occupancy prediction, and multi-view depth estimation -- the competition laid down a gauntlet to innovate and enhance system resilience against typical and atypical disturbances. This year's challenge consisted of five distinct tracks and attracted 140 registered teams from 93 institutes across 11 countries, resulting in nearly one thousand submissions evaluated through our servers. The competition culminated in 15 top-performing solutions, which introduced a range of innovative approaches including advanced data augmentation, multi-sensor fusion, self-supervised learning for error correction, and new algorithmic strategies to enhance sensor robustness. These contributions significantly advanced the state of the art, particularly in handling sensor inconsistencies and environmental variability. Participants, through collaborative efforts, pushed the boundaries of current technologies, showcasing their potential in real-world scenarios. Extensive evaluations and analyses provided insights into the effectiveness of these solutions, highlighting key trends and successful strategies for improving the resilience of driving perception systems. This challenge has set a new benchmark in the field, providing a rich repository of techniques expected to guide future research in this field.
Understanding the Robustness of 3D Object Detection with Bird's-Eye-View Representations in Autonomous Driving
Mar 30, 20233D object detection is an essential perception task in autonomous driving to understand the environments. The Bird's-Eye-View (BEV) representations have significantly improved the performance of 3D detectors with camera inputs on popular benchmarks. However, there still lacks a systematic understanding of the robustness of these vision-dependent BEV models, which is closely related to the safety of autonomous driving systems. In this paper, we evaluate the natural and adversarial robustness of various representative models under extensive settings, to fully understand their behaviors influenced by explicit BEV features compared with those without BEV. In addition to the classic settings, we propose a 3D consistent patch attack by applying adversarial patches in the 3D space to guarantee the spatiotemporal consistency, which is more realistic for the scenario of autonomous driving. With substantial experiments, we draw several findings: 1) BEV models tend to be more stable than previous methods under different natural conditions and common corruptions due to the expressive spatial representations; 2) BEV models are more vulnerable to adversarial noises, mainly caused by the redundant BEV features; 3) Camera-LiDAR fusion models have superior performance under different settings with multi-modal inputs, but BEV fusion model is still vulnerable to adversarial noises of both point cloud and image. These findings alert the safety issue in the applications of BEV detectors and could facilitate the development of more robust models.
Classification of lung nodules in CT images based on Wasserstein distance in differential geometry
Jun 30, 2018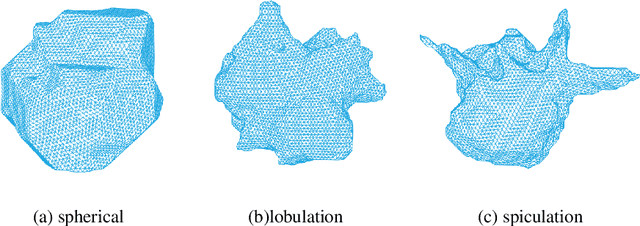
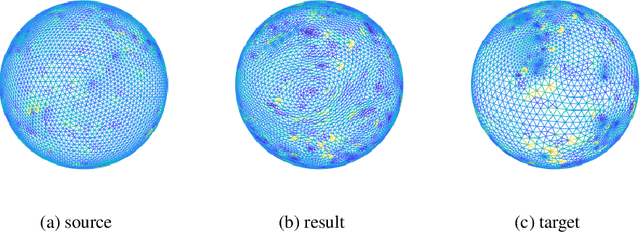
Lung nodules are commonly detected in screening for patients with a risk for lung cancer. Though the status of large nodules can be easily diagnosed by fine needle biopsy or bronchoscopy, small nodules are often difficult to classify on computed tomography (CT). Recent works have shown that shape analysis of lung nodules can be used to differentiate benign lesions from malignant ones, though existing methods are limited in their sensitivity and specificity. In this work we introduced a new 3D shape analysis within the framework of differential geometry to calculate the Wasserstein distance between benign and malignant lung nodules to derive an accurate classification scheme. The Wasserstein distance between the nodules is calculated based on our new spherical optimal mass transport, this new algorithm works directly on sphere by using spherical metric, which is much more accurate and efficient than previous methods. In the process of deformation, the area-distortion factor gives a probability measure on the unit sphere, which forms the Wasserstein space. From known cases of benign and malignant lung nodules, we can calculate a unique optimal mass transport map between their correspondingly deformed Wasserstein spaces. This transportation cost defines the Wasserstein distance between them and can be used to classify new lung nodules into either the benign or malignant class. To the best of our knowledge, this is the first work that utilizes Wasserstein distance for lung nodule classification. The advantages of Wasserstein distance are it is invariant under rigid motions and scalings, thus it intrinsically measures shape distance even when the underlying shapes are of high complexity, making it well suited to classify lung nodules as they have different sizes, orientations, and appearances.