 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHOIGS: Human-Object Interaction Gaussian Splatting
Apr 05, 2026Reconstructing dynamic scenes with complex human-object interactions is a fundamental challenge in computer vision and graphics. Existing Gaussian Splatting methods either rely on human pose priors while neglecting dynamic objects, or approximate all motions within a single field, limiting their ability to capture interaction-rich dynamics. To address this gap, we propose Human-Object Interaction Gaussian Splatting (HOIGS), which explicitly models interaction-induced deformation between humans and objects through a cross-attention-based HOI module. Distinct deformation baselines are employed to extract features: HexPlane for humans and Cubic Hermite Spline (CHS) for objects. By integrating these heterogeneous features, HOIGS effectively captures interdependent motions and improves deformation estimation in scenarios involving occlusion, contact, and object manipulation. Comprehensive experiments on multiple datasets demonstrate that our method consistently outperforms state-of-the-art human-centric and 4D Gaussian approaches, highlighting the importance of explicitly modeling human-object interactions for high-fidelity reconstruction.
Coherent Human-Scene Reconstruction from Multi-Person Multi-View Video in a Single Pass
Mar 13, 2026Recent advances in 3D foundation models have led to growing interest in reconstructing humans and their surrounding environments. However, most existing approaches focus on monocular inputs, and extending them to multi-view settings requires additional overhead modules or preprocessed data. To this end, we present CHROMM, a unified framework that jointly estimates cameras, scene point clouds, and human meshes from multi-person multi-view videos without relying on external modules or preprocessing. We integrate strong geometric and human priors from Pi3X and Multi-HMR into a single trainable neural network architecture, and introduce a scale adjustment module to solve the scale discrepancy between humans and the scene. We also introduce a multi-view fusion strategy to aggregate per-view estimates into a single representation at test-time. Finally, we propose a geometry-based multi-person association method, which is more robust than appearance-based approaches. Experiments on EMDB, RICH, EgoHumans, and EgoExo4D show that CHROMM achieves competitive performance in global human motion and multi-view pose estimation while running over 8x faster than prior optimization-based multi-view approaches. Project page: https://nstar1125.github.io/chromm.
SeaCache: Spectral-Evolution-Aware Cache for Accelerating Diffusion Models
Feb 22, 2026Diffusion models are a strong backbone for visual generation, but their inherently sequential denoising process leads to slow inference. Previous methods accelerate sampling by caching and reusing intermediate outputs based on feature distances between adjacent timesteps. However, existing caching strategies typically rely on raw feature differences that entangle content and noise. This design overlooks spectral evolution, where low-frequency structure appears early and high-frequency detail is refined later. We introduce Spectral-Evolution-Aware Cache (SeaCache), a training-free cache schedule that bases reuse decisions on a spectrally aligned representation. Through theoretical and empirical analysis, we derive a Spectral-Evolution-Aware (SEA) filter that preserves content-relevant components while suppressing noise. Employing SEA-filtered input features to estimate redundancy leads to dynamic schedules that adapt to content while respecting the spectral priors underlying the diffusion model. Extensive experiments on diverse visual generative models and the baselines show that SeaCache achieves state-of-the-art latency-quality trade-offs.
Humans as a Calibration Pattern: Dynamic 3D Scene Reconstruction from Unsynchronized and Uncalibrated Videos
Dec 26, 2024



Recent works on dynamic neural field reconstruction assume input from synchronized multi-view videos with known poses. These input constraints are often unmet in real-world setups, making the approach impractical. We demonstrate that unsynchronized videos with unknown poses can generate dynamic neural fields if the videos capture human motion. Humans are one of the most common dynamic subjects whose poses can be estimated using state-of-the-art methods. While noisy, the estimated human shape and pose parameters provide a decent initialization for the highly non-convex and under-constrained problem of training a consistent dynamic neural representation. Given the sequences of pose and shape of humans, we estimate the time offsets between videos, followed by camera pose estimations by analyzing 3D joint locations. Then, we train dynamic NeRF employing multiresolution rids while simultaneously refining both time offsets and camera poses. The setup still involves optimizing many parameters, therefore, we introduce a robust progressive learning strategy to stabilize the process. Experiments show that our approach achieves accurate spatiotemporal calibration and high-quality scene reconstruction in challenging conditions.
CoCoGaussian: Leveraging Circle of Confusion for Gaussian Splatting from Defocused Images
Dec 20, 2024



3D Gaussian Splatting (3DGS) has attracted significant attention for its high-quality novel view rendering, inspiring research to address real-world challenges. While conventional methods depend on sharp images for accurate scene reconstruction, real-world scenarios are often affected by defocus blur due to finite depth of field, making it essential to account for realistic 3D scene representation. In this study, we propose CoCoGaussian, a Circle of Confusion-aware Gaussian Splatting that enables precise 3D scene representation using only defocused images. CoCoGaussian addresses the challenge of defocus blur by modeling the Circle of Confusion (CoC) through a physically grounded approach based on the principles of photographic defocus. Exploiting 3D Gaussians, we compute the CoC diameter from depth and learnable aperture information, generating multiple Gaussians to precisely capture the CoC shape. Furthermore, we introduce a learnable scaling factor to enhance robustness and provide more flexibility in handling unreliable depth in scenes with reflective or refractive surfaces. Experiments on both synthetic and real-world datasets demonstrate that CoCoGaussian achieves state-of-the-art performance across multiple benchmarks.
Regularizing Dynamic Radiance Fields with Kinematic Fields
Jul 19, 2024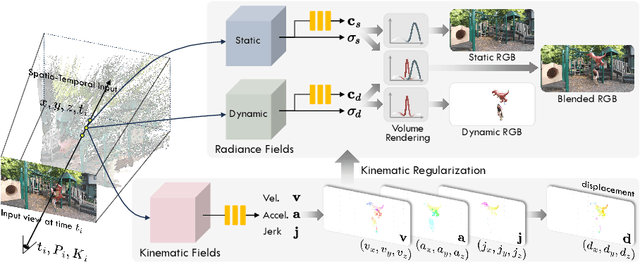
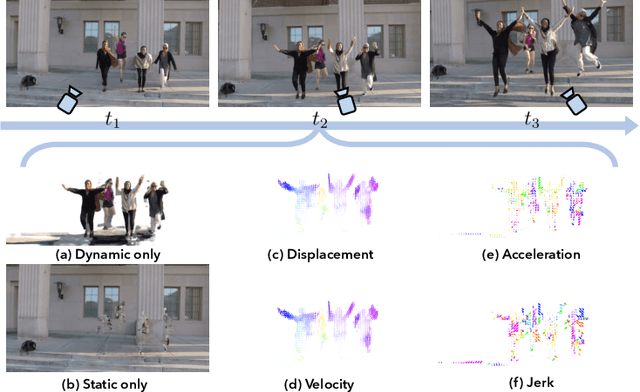
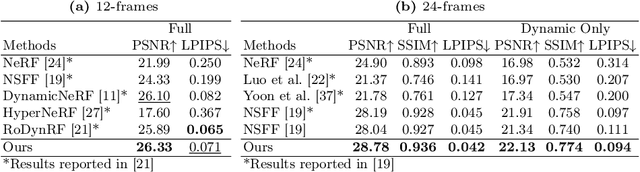
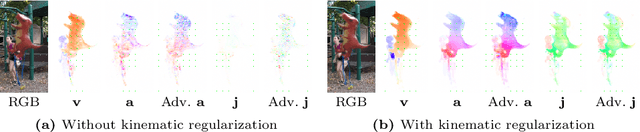
This paper presents a novel approach for reconstructing dynamic radiance fields from monocular videos. We integrate kinematics with dynamic radiance fields, bridging the gap between the sparse nature of monocular videos and the real-world physics. Our method introduces the kinematic field, capturing motion through kinematic quantities: velocity, acceleration, and jerk. The kinematic field is jointly learned with the dynamic radiance field by minimizing the photometric loss without motion ground truth. We further augment our method with physics-driven regularizers grounded in kinematics. We propose physics-driven regularizers that ensure the physical validity of predicted kinematic quantities, including advective acceleration and jerk. Additionally, we control the motion trajectory based on rigidity equations formed with the predicted kinematic quantities. In experiments, our method outperforms the state-of-the-arts by capturing physical motion patterns within challenging real-world monocular videos.
Out of Sight, Out of Mind: A Source-View-Wise Feature Aggregation for Multi-View Image-Based Rendering
Jun 10, 2022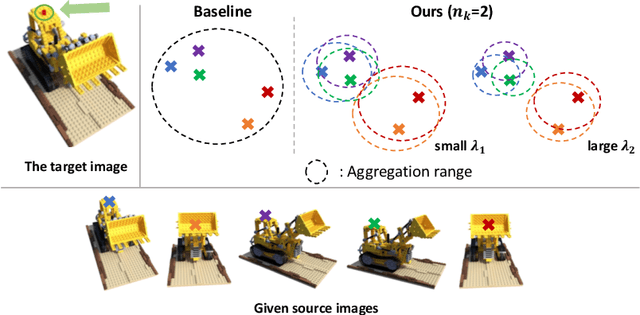
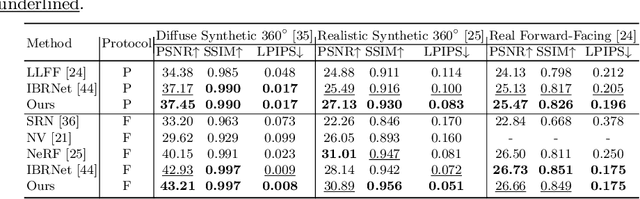
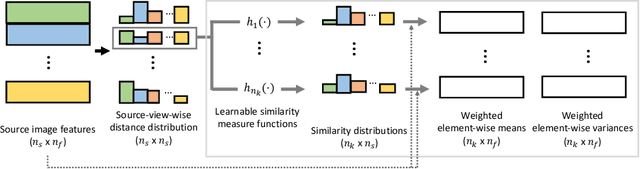

To estimate the volume density and color of a 3D point in the multi-view image-based rendering, a common approach is to inspect the consensus existence among the given source image features, which is one of the informative cues for the estimation procedure. To this end, most of the previous methods utilize equally-weighted aggregation features. However, this could make it hard to check the consensus existence when some outliers, which frequently occur by occlusions, are included in the source image feature set. In this paper, we propose a novel source-view-wise feature aggregation method, which facilitates us to find out the consensus in a robust way by leveraging local structures in the feature set. We first calculate the source-view-wise distance distribution for each source feature for the proposed aggregation. After that, the distance distribution is converted to several similarity distributions with the proposed learnable similarity mapping functions. Finally, for each element in the feature set, the aggregation features are extracted by calculating the weighted means and variances, where the weights are derived from the similarity distributions. In experiments, we validate the proposed method on various benchmark datasets, including synthetic and real image scenes. The experimental results demonstrate that incorporating the proposed features improves the performance by a large margin, resulting in the state-of-the-art performance.
Self-Supervised Depth Estimation with Isometric-Self-Sample-Based Learning
May 20, 2022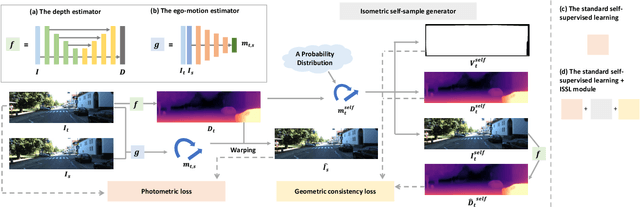
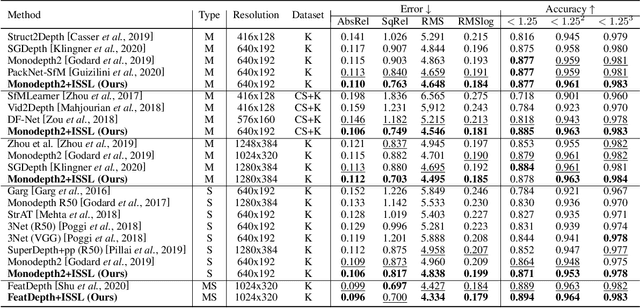
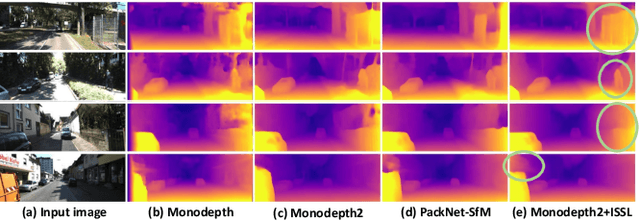
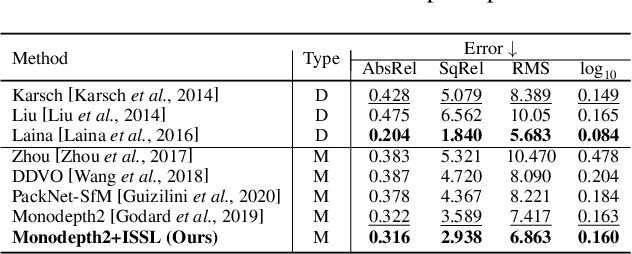
Managing the dynamic regions in the photometric loss formulation has been a main issue for handling the self-supervised depth estimation problem. Most previous methods have alleviated this issue by removing the dynamic regions in the photometric loss formulation based on the masks estimated from another module, making it difficult to fully utilize the training images. In this paper, to handle this problem, we propose an isometric self-sample-based learning (ISSL) method to fully utilize the training images in a simple yet effective way. The proposed method provides additional supervision during training using self-generated images that comply with pure static scene assumption. Specifically, the isometric self-sample generator synthesizes self-samples for each training image by applying random rigid transformations on the estimated depth. Thus both the generated self-samples and the corresponding training image always follow the static scene assumption. We show that plugging our ISSL module into several existing models consistently improves the performance by a large margin. In addition, it also boosts the depth accuracy over different types of scene, i.e., outdoor scenes (KITTI and Make3D) and indoor scene (NYUv2), validating its high effectiveness.
Interactive Text2Pickup Network for Natural Language based Human-Robot Collaboration
May 28, 2018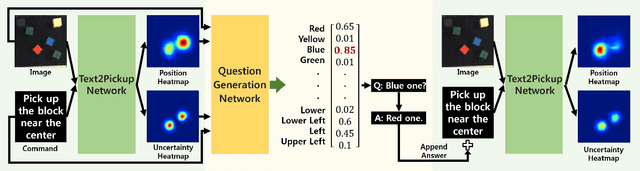
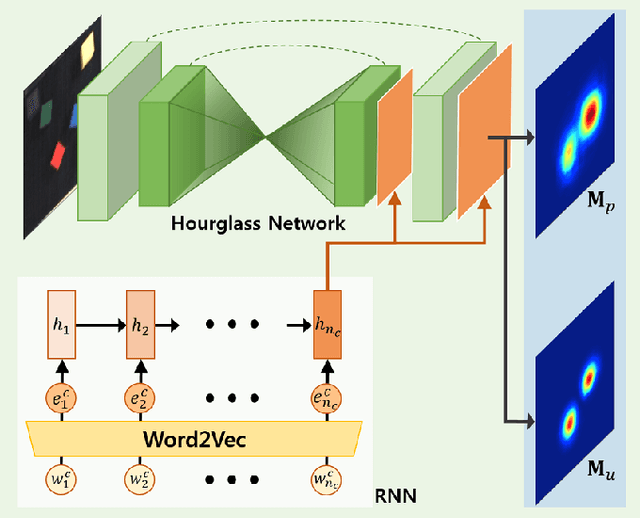
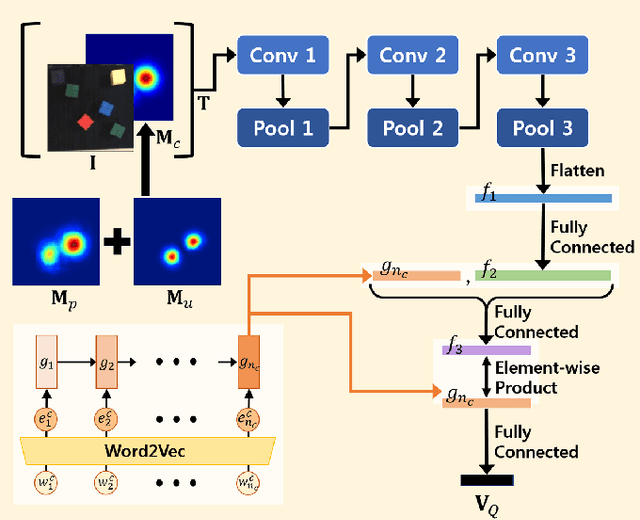
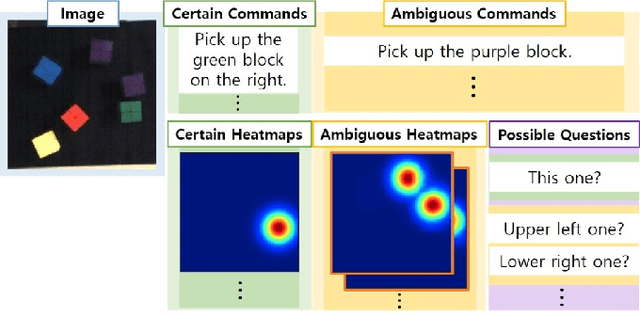
In this paper, we propose the Interactive Text2Pickup (IT2P) network for human-robot collaboration which enables an effective interaction with a human user despite the ambiguity in user's commands. We focus on the task where a robot is expected to pick up an object instructed by a human, and to interact with the human when the given instruction is vague. The proposed network understands the command from the human user and estimates the position of the desired object first. To handle the inherent ambiguity in human language commands, a suitable question which can resolve the ambiguity is generated. The user's answer to the question is combined with the initial command and given back to the network, resulting in more accurate estimation. The experiment results show that given unambiguous commands, the proposed method can estimate the position of the requested object with an accuracy of 98.49% based on our test dataset. Given ambiguous language commands, we show that the accuracy of the pick up task increases by 1.94 times after incorporating the information obtained from the interaction.
Deep Pose Consensus Networks
Mar 22, 2018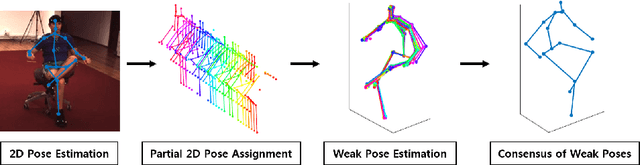
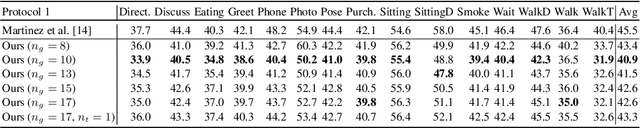
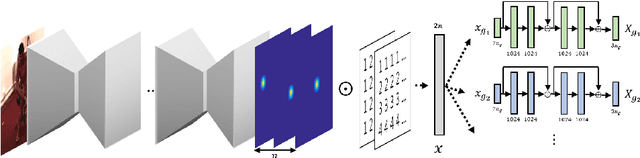
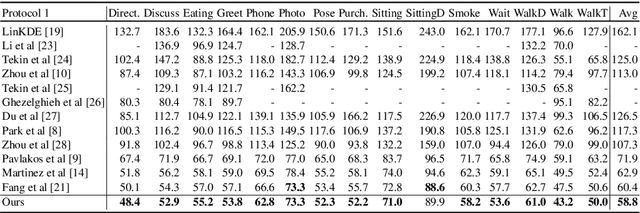
In this paper, we address the problem of estimating a 3D human pose from a single image, which is important but difficult to solve due to many reasons, such as self-occlusions, wild appearance changes, and inherent ambiguities of 3D estimation from a 2D cue. These difficulties make the problem ill-posed, which have become requiring increasingly complex estimators to enhance the performance. On the other hand, most existing methods try to handle this problem based on a single complex estimator, which might not be good solutions. In this paper, to resolve this issue, we propose a multiple-partial-hypothesis-based framework for the problem of estimating 3D human pose from a single image, which can be fine-tuned in an end-to-end fashion. We first select several joint groups from a human joint model using the proposed sampling scheme, and estimate the 3D poses of each joint group separately based on deep neural networks. After that, they are aggregated to obtain the final 3D poses using the proposed robust optimization formula. The overall procedure can be fine-tuned in an end-to-end fashion, resulting in better performance. In the experiments, the proposed framework shows the state-of-the-art performances on popular benchmark data sets, namely Human3.6M and HumanEva, which demonstrate the effectiveness of the proposed framework.