 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSatFusion: A Unified Framework for Enhancing Satellite IoT Images via Multi-Temporal and Multi-Source Data Fusion
Oct 09, 2025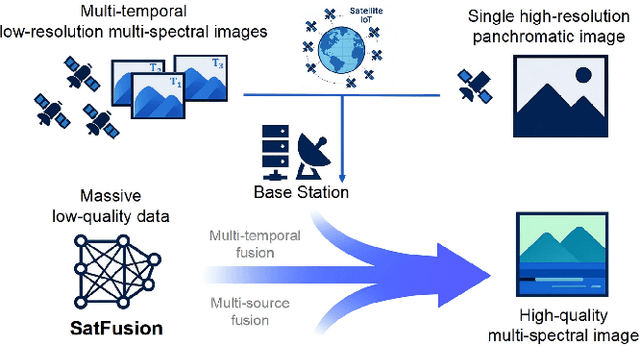
With the rapid advancement of the digital society, the proliferation of satellites in the Satellite Internet of Things (Sat-IoT) has led to the continuous accumulation of large-scale multi-temporal and multi-source images across diverse application scenarios. However, existing methods fail to fully exploit the complementary information embedded in both temporal and source dimensions. For example, Multi-Image Super-Resolution (MISR) enhances reconstruction quality by leveraging temporal complementarity across multiple observations, yet the limited fine-grained texture details in input images constrain its performance. Conversely, pansharpening integrates multi-source images by injecting high-frequency spatial information from panchromatic data, but typically relies on pre-interpolated low-resolution inputs and assumes noise-free alignment, making it highly sensitive to noise and misregistration. To address these issues, we propose SatFusion: A Unified Framework for Enhancing Satellite IoT Images via Multi-Temporal and Multi-Source Data Fusion. Specifically, SatFusion first employs a Multi-Temporal Image Fusion (MTIF) module to achieve deep feature alignment with the panchromatic image. Then, a Multi-Source Image Fusion (MSIF) module injects fine-grained texture information from the panchromatic data. Finally, a Fusion Composition module adaptively integrates the complementary advantages of both modalities while dynamically refining spectral consistency, supervised by a weighted combination of multiple loss functions. Extensive experiments on the WorldStrat, WV3, QB, and GF2 datasets demonstrate that SatFusion significantly improves fusion quality, robustness under challenging conditions, and generalizability to real-world Sat-IoT scenarios. The code is available at: https://github.com/dllgyufei/SatFusion.git.
Facilitate Collaboration between Large Language Model and Task-specific Model for Time Series Anomaly Detection
Jan 10, 2025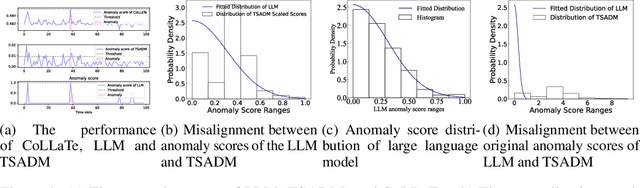
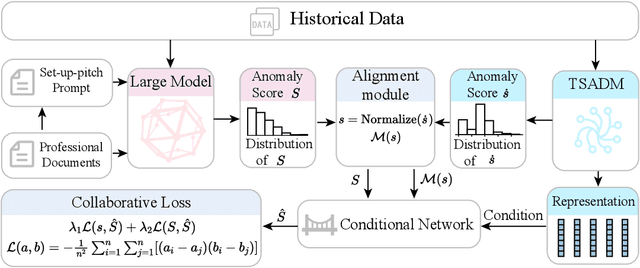
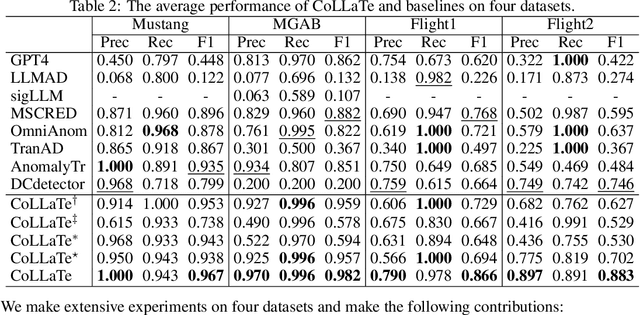
In anomaly detection, methods based on large language models (LLMs) can incorporate expert knowledge, while task-specific smaller models excel at extracting normal patterns and detecting value fluctuations. Inspired by the human nervous system, where the brain stores expert knowledge and the peripheral nervous system and spinal cord handle specific tasks like withdrawal and knee-jerk reflexes, we propose CoLLaTe, a framework designed to facilitate collaboration between LLMs and task-specific models, leveraging the strengths of both. In this work, we first formulate the collaboration process and identify two key challenges in the collaboration between LLMs and task-specific models: (1) the misalignment between the expression domains of LLMs and smaller models, and (2) error accumulation arising from the predictions of both models. To address these challenges, we introduce two key components in CoLLaTe: the alignment module and the collaborative loss function. Through theoretical analysis and experimental validation, we demonstrate that these components effectively mitigate the identified challenges and achieve better performance than LLM based methods and task-specific smaller model.
Cluster-Wide Task Slowdown Detection in Cloud System
Aug 08, 2024



Slow task detection is a critical problem in cloud operation and maintenance since it is highly related to user experience and can bring substantial liquidated damages. Most anomaly detection methods detect it from a single-task aspect. However, considering millions of concurrent tasks in large-scale cloud computing clusters, it becomes impractical and inefficient. Moreover, single-task slowdowns are very common and do not necessarily indicate a malfunction of a cluster due to its violent fluctuation nature in a virtual environment. Thus, we shift our attention to cluster-wide task slowdowns by utilizing the duration time distribution of tasks across a cluster, so that the computation complexity is not relevant to the number of tasks. The task duration time distribution often exhibits compound periodicity and local exceptional fluctuations over time. Though transformer-based methods are one of the most powerful methods to capture these time series normal variation patterns, we empirically find and theoretically explain the flaw of the standard attention mechanism in reconstructing subperiods with low amplitude when dealing with compound periodicity. To tackle these challenges, we propose SORN (i.e., Skimming Off subperiods in descending amplitude order and Reconstructing Non-slowing fluctuation), which consists of a Skimming Attention mechanism to reconstruct the compound periodicity and a Neural Optimal Transport module to distinguish cluster-wide slowdowns from other exceptional fluctuations. Furthermore, since anomalies in the training set are inevitable in a practical scenario, we propose a picky loss function, which adaptively assigns higher weights to reliable time slots in the training set. Extensive experiments demonstrate that SORN outperforms state-of-the-art methods on multiple real-world industrial datasets.
MACE: A Multi-pattern Accommodated and Efficient Anomaly Detection Method in the Frequency Domain
Nov 26, 2023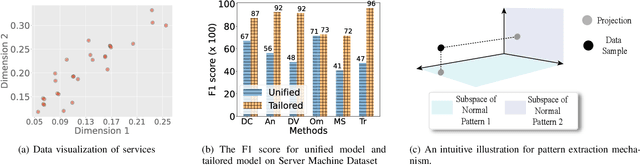
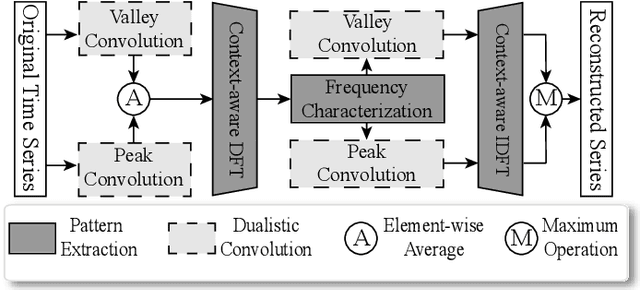
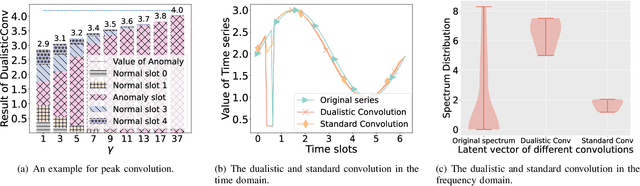
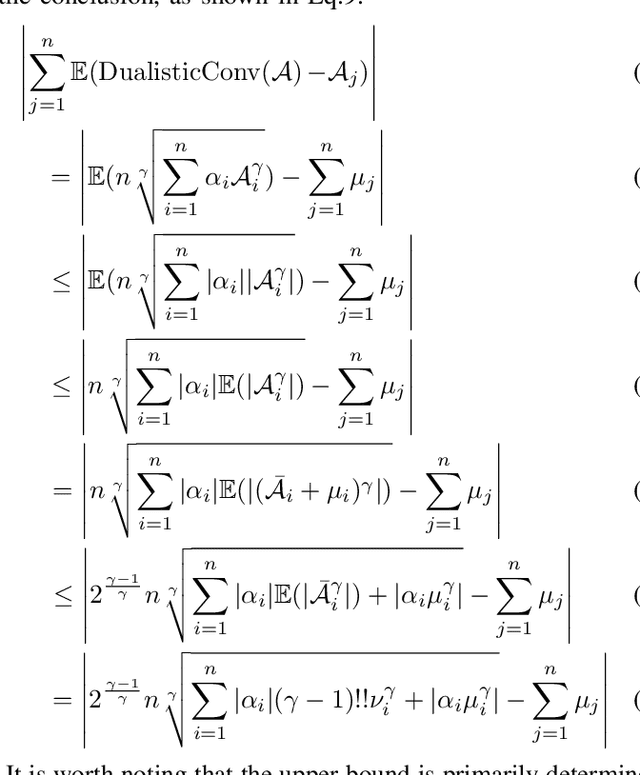
Anomaly detection significantly enhances the robustness of cloud systems. While neural network-based methods have recently demonstrated strong advantages, they encounter practical challenges in cloud environments: the contradiction between the impracticality of maintaining a unique model for each service and the limited ability of dealing with diverse normal patterns by a unified model, as well as issues with handling heavy traffic in real time and short-term anomaly detection sensitivity. Thus, we propose MACE, a Multi-pattern Accommodated and efficient Anomaly detection method in the frequency domain for time series anomaly detection. There are three novel characteristics of it: (i) a pattern extraction mechanism excelling at handling diverse normal patterns, which enables the model to identify anomalies by examining the correlation between the data sample and its service normal pattern, instead of solely focusing on the data sample itself; (ii) a dualistic convolution mechanism that amplifies short-term anomalies in the time domain and hinders the reconstruction of anomalies in the frequency domain, which enlarges the reconstruction error disparity between anomaly and normality and facilitates anomaly detection; (iii) leveraging the sparsity and parallelism of frequency domain to enhance model efficiency. We theoretically and experimentally prove that using a strategically selected subset of Fourier bases can not only reduce computational overhead but is also profit to distinguish anomalies, compared to using the complete spectrum. Moreover, extensive experiments demonstrate MACE's effectiveness in handling diverse normal patterns with a unified model and it achieves state-of-the-art performance with high efficiency. \end{abstract}
LARA: A Light and Anti-overfitting Retraining Approach for Unsupervised Anomaly Detection
Oct 09, 2023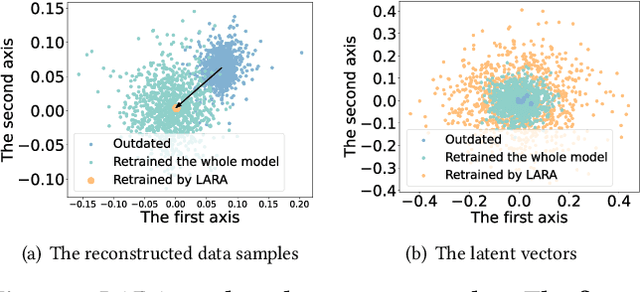
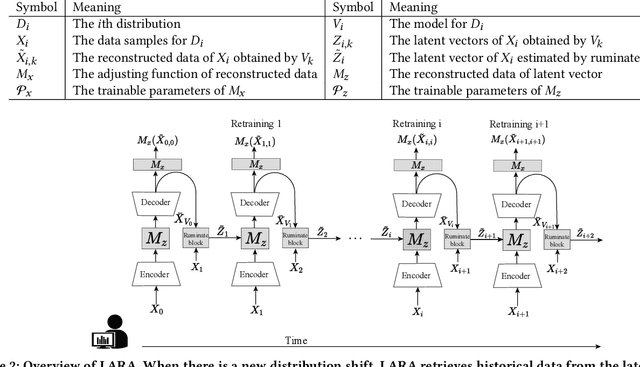
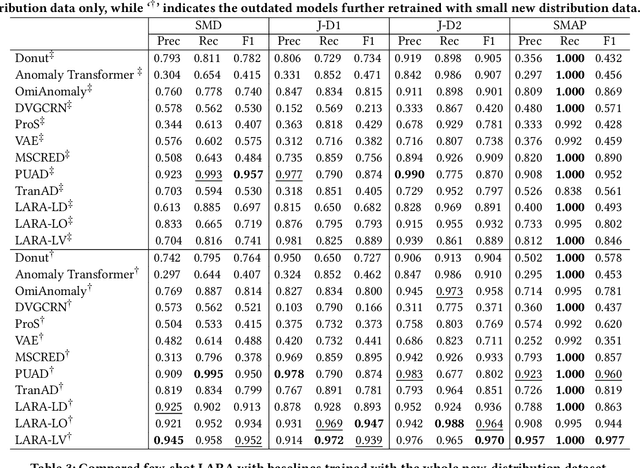
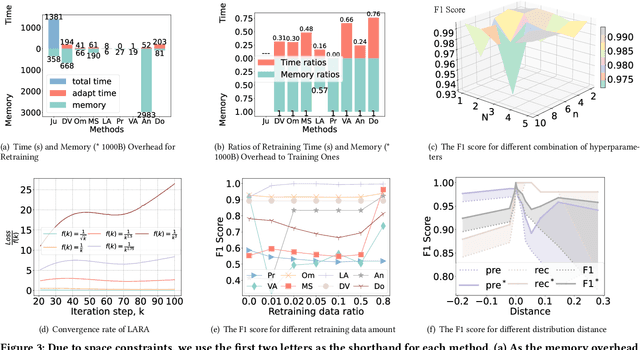
Most of current anomaly detection models assume that the normal pattern remains same all the time. However, the normal patterns of Web services change dramatically and frequently. The model trained on old-distribution data is outdated after such changes. Retraining the whole model every time is expensive. Besides, at the beginning of normal pattern changes, there is not enough observation data from the new distribution. Retraining a large neural network model with limited data is vulnerable to overfitting. Thus, we propose a Light and Anti-overfitting Retraining Approach (LARA) for deep variational auto-encoder based time series anomaly detection methods (VAEs). This work aims to make three novel contributions: 1) the retraining process is formulated as a convex problem and can converge at a fast rate as well as prevent overfitting; 2) designing a ruminate block, which leverages the historical data without the need to store them; 3) mathematically proving that when fine-tuning the latent vector and reconstructed data, the linear formations can achieve the least adjusting errors between the ground truths and the fine-tuned ones. Moreover, we have performed many experiments to verify that retraining LARA with even 43 time slots of data from new distribution can result in its competitive F1 Score in comparison with the state-of-the-art anomaly detection models trained with sufficient data. Besides, we verify its light overhead.
Resisting Backdoor Attacks in Federated Learning via Bidirectional Elections and Individual Perspective
Sep 28, 2023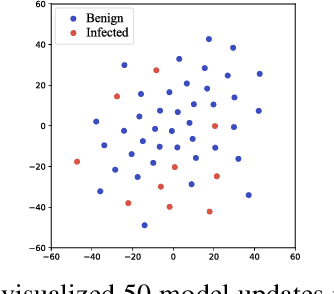
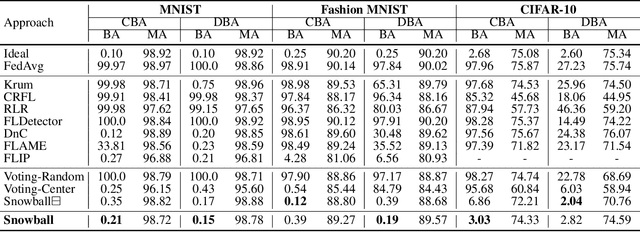
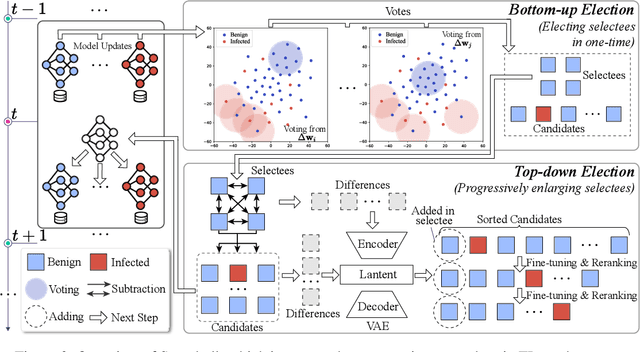
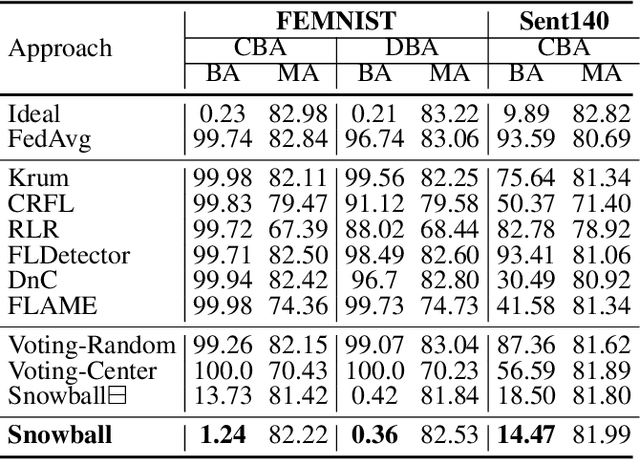
Existing approaches defend against backdoor attacks in federated learning (FL) mainly through a) mitigating the impact of infected models, or b) excluding infected models. The former negatively impacts model accuracy, while the latter usually relies on globally clear boundaries between benign and infected model updates. However, model updates are easy to be mixed and scattered throughout in reality due to the diverse distributions of local data. This work focuses on excluding infected models in FL. Unlike previous perspectives from a global view, we propose Snowball, a novel anti-backdoor FL framework through bidirectional elections from an individual perspective inspired by one principle deduced by us and two principles in FL and deep learning. It is characterized by a) bottom-up election, where each candidate model update votes to several peer ones such that a few model updates are elected as selectees for aggregation; and b) top-down election, where selectees progressively enlarge themselves through picking up from the candidates. We compare Snowball with state-of-the-art defenses to backdoor attacks in FL on five real-world datasets, demonstrating its superior resistance to backdoor attacks and slight impact on the accuracy of the global model.
LCE-Calib: Automatic LiDAR-Frame/Event Camera Extrinsic Calibration With A Globally Optimal Solution
Mar 17, 2023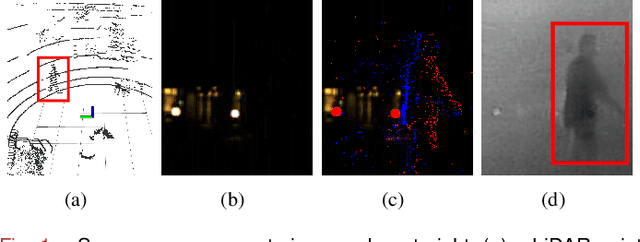
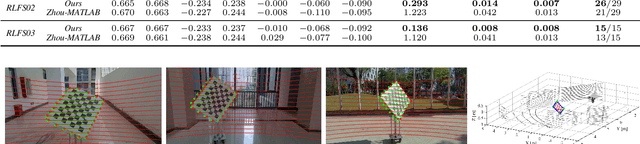
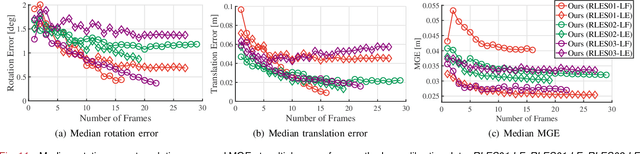
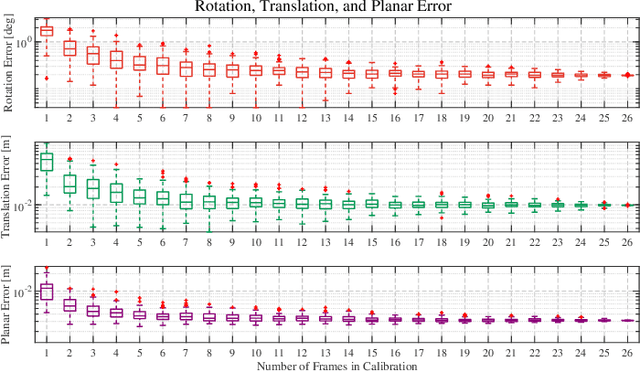
The combination of LiDARs and cameras enables a mobile robot to perceive environments with multi-modal data, becoming a key factor in achieving robust perception. Traditional frame cameras are sensitive to changing illumination conditions, motivating us to introduce novel event cameras to make LiDAR-camera fusion more complete and robust. However, to jointly exploit these sensors, the challenging extrinsic calibration problem should be addressed. This paper proposes an automatic checkerboard-based approach to calibrate extrinsics between a LiDAR and a frame/event camera, where four contributions are presented. Firstly, we present an automatic feature extraction and checkerboard tracking method from LiDAR's point clouds. Secondly, we reconstruct realistic frame images from event streams, applying traditional corner detectors to event cameras. Thirdly, we propose an initialization-refinement procedure to estimate extrinsics using point-to-plane and point-to-line constraints in a coarse-to-fine manner. Fourthly, we introduce a unified and globally optimal solution to address two optimization problems in calibration. Our approach has been validated with extensive experiments on 19 simulated and real-world datasets and outperforms the state-of-the-art.
MMFN: Multi-Modal-Fusion-Net for End-to-End Driving
Jul 01, 2022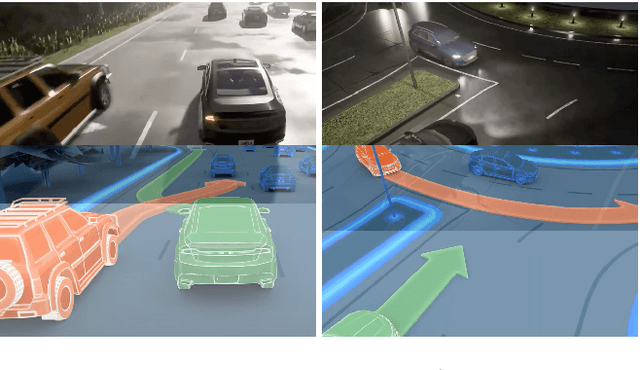
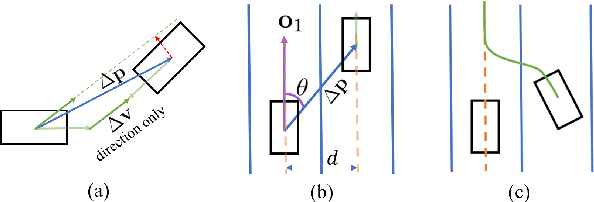
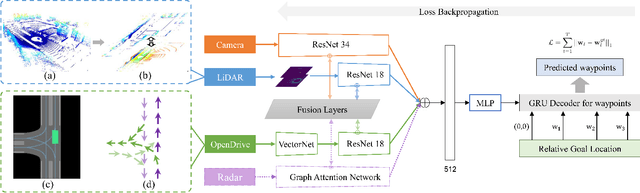
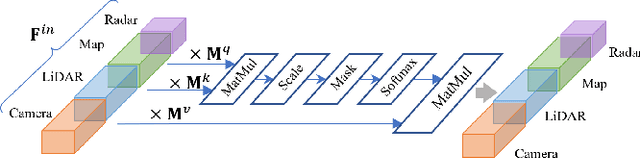
Inspired by the fact that humans use diverse sensory organs to perceive the world, sensors with different modalities are deployed in end-to-end driving to obtain the global context of the 3D scene. In previous works, camera and LiDAR inputs are fused through transformers for better driving performance. These inputs are normally further interpreted as high-level map information to assist navigation tasks. Nevertheless, extracting useful information from the complex map input is challenging, for redundant information may mislead the agent and negatively affect driving performance. We propose a novel approach to efficiently extract features from vectorized High-Definition (HD) maps and utilize them in the end-to-end driving tasks. In addition, we design a new expert to further enhance the model performance by considering multi-road rules. Experimental results prove that both of the proposed improvements enable our agent to achieve superior performance compared with other methods.