 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROD: RGB-Only Fast and Efficient Off-road Freespace Detection
Aug 12, 2025



Off-road freespace detection is more challenging than on-road scenarios because of the blurred boundaries of traversable areas. Previous state-of-the-art (SOTA) methods employ multi-modal fusion of RGB images and LiDAR data. However, due to the significant increase in inference time when calculating surface normal maps from LiDAR data, multi-modal methods are not suitable for real-time applications, particularly in real-world scenarios where higher FPS is required compared to slow navigation. This paper presents a novel RGB-only approach for off-road freespace detection, named ROD, eliminating the reliance on LiDAR data and its computational demands. Specifically, we utilize a pre-trained Vision Transformer (ViT) to extract rich features from RGB images. Additionally, we design a lightweight yet efficient decoder, which together improve both precision and inference speed. ROD establishes a new SOTA on ORFD and RELLIS-3D datasets, as well as an inference speed of 50 FPS, significantly outperforming prior models.
Joint Knowledge and Power Management for Secure Semantic Communication Networks
Apr 21, 2025Recently, semantic communication (SemCom) has shown its great superiorities in resource savings and information exchanges. However, while its unique background knowledge guarantees accurate semantic reasoning and recovery, semantic information security-related concerns are introduced at the same time. Since the potential eavesdroppers may have the same background knowledge to accurately decrypt the private semantic information transmitted between legal SemCom users, this makes the knowledge management in SemCom networks rather challenging in joint consideration with the power control. To this end, this paper focuses on jointly addressing three core issues of power allocation, knowledge base caching (KBC), and device-to-device (D2D) user pairing (DUP) in secure SemCom networks. We first develop a novel performance metric, namely semantic secrecy throughput (SST), to quantify the information security level that can be achieved at each pair of D2D SemCom users. Next, an SST maximization problem is formulated subject to secure SemCom-related delay and reliability constraints. Afterward, we propose a security-aware resource management solution using the Lagrange primal-dual method and a two-stage method. Simulation results demonstrate our proposed solution nearly doubles the SST performance and realizes less than half of the queuing delay performance compared to different benchmarks.
WildOcc: A Benchmark for Off-Road 3D Semantic Occupancy Prediction
Oct 21, 20243D semantic occupancy prediction is an essential part of autonomous driving, focusing on capturing the geometric details of scenes. Off-road environments are rich in geometric information, therefore it is suitable for 3D semantic occupancy prediction tasks to reconstruct such scenes. However, most of researches concentrate on on-road environments, and few methods are designed for off-road 3D semantic occupancy prediction due to the lack of relevant datasets and benchmarks. In response to this gap, we introduce WildOcc, to our knowledge, the first benchmark to provide dense occupancy annotations for off-road 3D semantic occupancy prediction tasks. A ground truth generation pipeline is proposed in this paper, which employs a coarse-to-fine reconstruction to achieve a more realistic result. Moreover, we introduce a multi-modal 3D semantic occupancy prediction framework, which fuses spatio-temporal information from multi-frame images and point clouds at voxel level. In addition, a cross-modality distillation function is introduced, which transfers geometric knowledge from point clouds to image features.
Autonomous Driving in Unstructured Environments: How Far Have We Come?
Oct 10, 2024
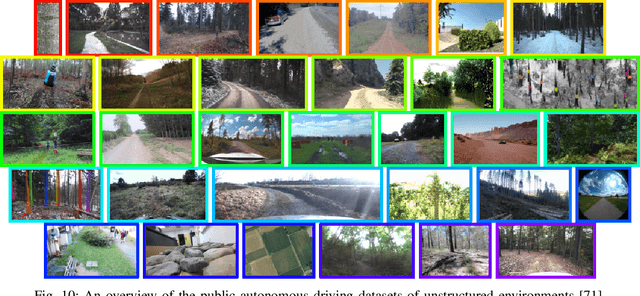
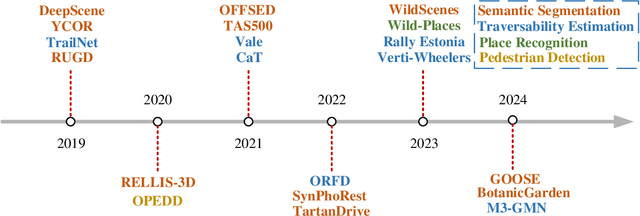
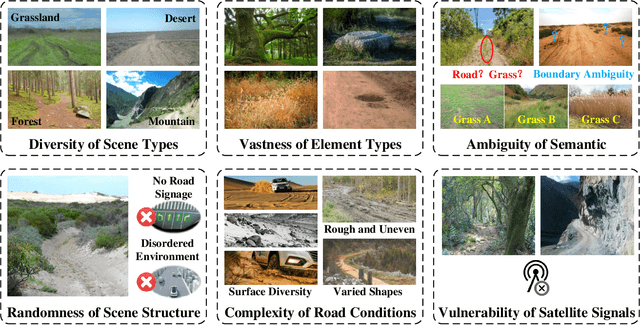
Research on autonomous driving in unstructured outdoor environments is less advanced than in structured urban settings due to challenges like environmental diversities and scene complexity. These environments-such as rural areas and rugged terrains-pose unique obstacles that are not common in structured urban areas. Despite these difficulties, autonomous driving in unstructured outdoor environments is crucial for applications in agriculture, mining, and military operations. Our survey reviews over 250 papers for autonomous driving in unstructured outdoor environments, covering offline mapping, pose estimation, environmental perception, path planning, end-to-end autonomous driving, datasets, and relevant challenges. We also discuss emerging trends and future research directions. This review aims to consolidate knowledge and encourage further research for autonomous driving in unstructured environments. To support ongoing work, we maintain an active repository with up-to-date literature and open-source projects at: https://github.com/chaytonmin/Survey-Autonomous-Driving-in-Unstructured-Environments.
Proto-OOD: Enhancing OOD Object Detection with Prototype Feature Similarity
Sep 09, 2024
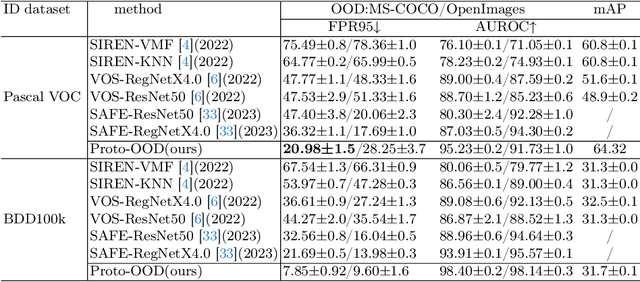
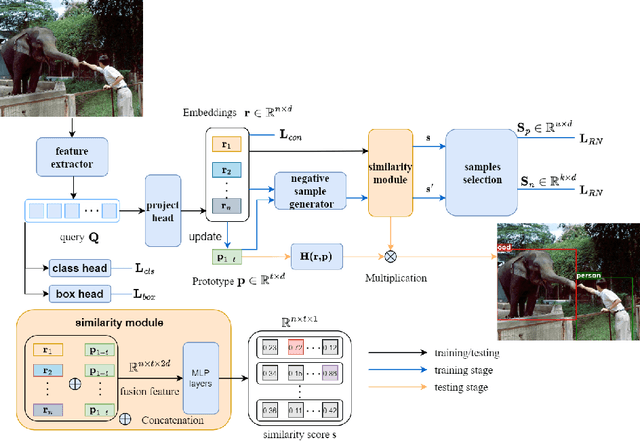
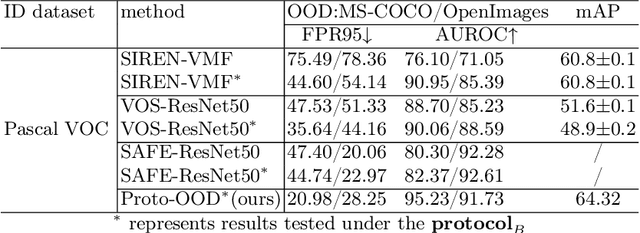
The limited training samples for object detectors commonly result in low accuracy out-of-distribution (OOD) object detection. We have observed that feature vectors of the same class tend to cluster tightly in feature space, whereas those of different classes are more scattered. This insight motivates us to leverage feature similarity for OOD detection. Drawing on the concept of prototypes prevalent in few-shot learning, we introduce a novel network architecture, Proto-OOD, designed for this purpose. Proto-OOD enhances prototype representativeness through contrastive loss and identifies OOD data by assessing the similarity between input features and prototypes. It employs a negative embedding generator to create negative embedding, which are then used to train the similarity module. Proto-OOD achieves significantly lower FPR95 in MS-COCO dataset and higher mAP for Pascal VOC dataset, when utilizing Pascal VOC as ID dataset and MS-COCO as OOD dataset. Additionally, we identify limitations in existing evaluation metrics and propose an enhanced evaluation protocol.
TeFF: Tracking-enhanced Forgetting-free Few-shot 3D LiDAR Semantic Segmentation
Aug 28, 2024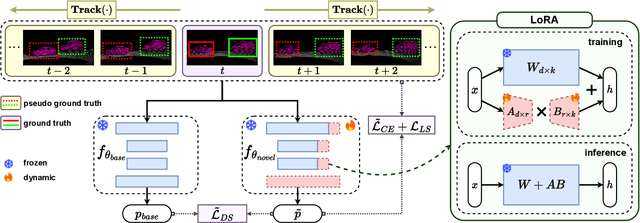
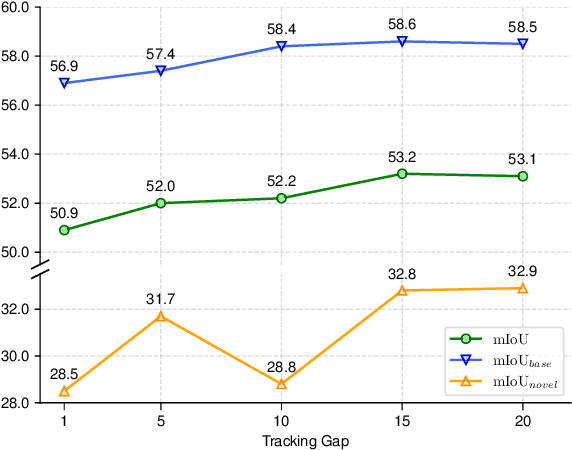
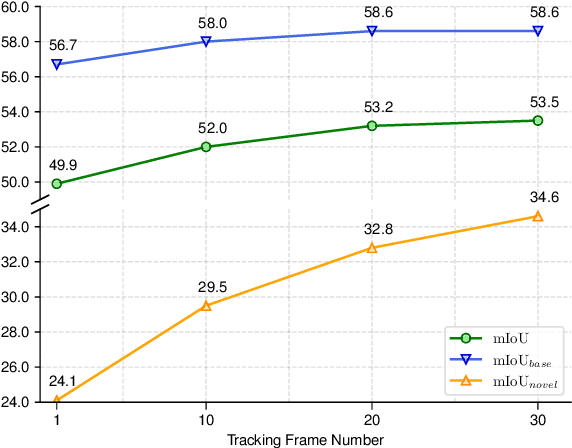
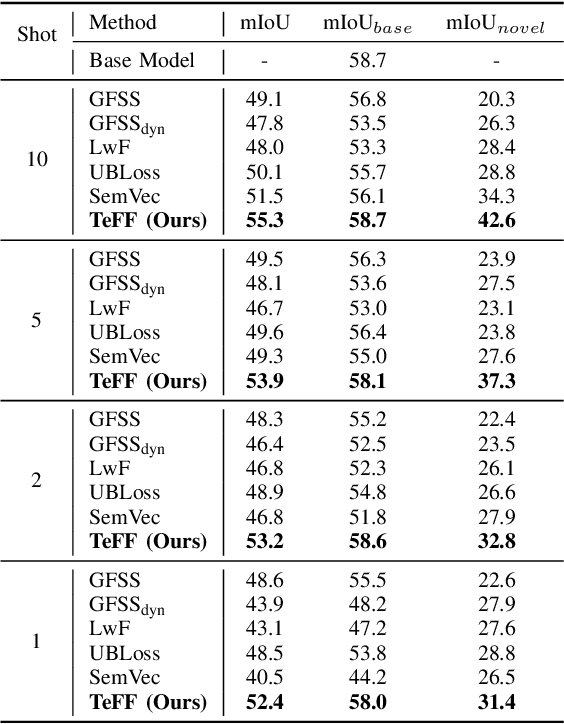
In autonomous driving, 3D LiDAR plays a crucial role in understanding the vehicle's surroundings. However, the newly emerged, unannotated objects presents few-shot learning problem for semantic segmentation. This paper addresses the limitations of current few-shot semantic segmentation by exploiting the temporal continuity of LiDAR data. Employing a tracking model to generate pseudo-ground-truths from a sequence of LiDAR frames, our method significantly augments the dataset, enhancing the model's ability to learn on novel classes. However, this approach introduces a data imbalance biased to novel data that presents a new challenge of catastrophic forgetting. To mitigate this, we incorporate LoRA, a technique that reduces the number of trainable parameters, thereby preserving the model's performance on base classes while improving its adaptability to novel classes. This work represents a significant step forward in few-shot 3D LiDAR semantic segmentation for autonomous driving. Our code is available at https://github.com/junbao-zhou/Track-no-forgetting.
PID: Physics-Informed Diffusion Model for Infrared Image Generation
Jul 12, 2024



Infrared imaging technology has gained significant attention for its reliable sensing ability in low visibility conditions, prompting many studies to convert the abundant RGB images to infrared images. However, most existing image translation methods treat infrared images as a stylistic variation, neglecting the underlying physical laws, which limits their practical application. To address these issues, we propose a Physics-Informed Diffusion (PID) model for translating RGB images to infrared images that adhere to physical laws. Our method leverages the iterative optimization of the diffusion model and incorporates strong physical constraints based on prior knowledge of infrared laws during training. This approach enhances the similarity between translated infrared images and the real infrared domain without increasing extra training parameters. Experimental results demonstrate that PID significantly outperforms existing state-of-the-art methods. Our code is available at https://github.com/fangyuanmao/PID.