 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUNIV: Unified Foundation Model for Infrared and Visible Modalities
Sep 19, 2025The demand for joint RGB-visible and infrared perception is growing rapidly, particularly to achieve robust performance under diverse weather conditions. Although pre-trained models for RGB-visible and infrared data excel in their respective domains, they often underperform in multimodal scenarios, such as autonomous vehicles equipped with both sensors. To address this challenge, we propose a biologically inspired UNified foundation model for Infrared and Visible modalities (UNIV), featuring two key innovations. First, we introduce Patch-wise Cross-modality Contrastive Learning (PCCL), an attention-guided distillation framework that mimics retinal horizontal cells' lateral inhibition, which enables effective cross-modal feature alignment while remaining compatible with any transformer-based architecture. Second, our dual-knowledge preservation mechanism emulates the retina's bipolar cell signal routing - combining LoRA adapters (2% added parameters) with synchronous distillation to prevent catastrophic forgetting, thereby replicating the retina's photopic (cone-driven) and scotopic (rod-driven) functionality. To support cross-modal learning, we introduce the MVIP dataset, the most comprehensive visible-infrared benchmark to date. It contains 98,992 precisely aligned image pairs spanning diverse scenarios. Extensive experiments demonstrate UNIV's superior performance on infrared tasks (+1.7 mIoU in semantic segmentation and +0.7 mAP in object detection) while maintaining 99%+ of the baseline performance on visible RGB tasks. Our code is available at https://github.com/fangyuanmao/UNIV.
Omni-Effects: Unified and Spatially-Controllable Visual Effects Generation
Aug 12, 2025Visual effects (VFX) are essential visual enhancements fundamental to modern cinematic production. Although video generation models offer cost-efficient solutions for VFX production, current methods are constrained by per-effect LoRA training, which limits generation to single effects. This fundamental limitation impedes applications that require spatially controllable composite effects, i.e., the concurrent generation of multiple effects at designated locations. However, integrating diverse effects into a unified framework faces major challenges: interference from effect variations and spatial uncontrollability during multi-VFX joint training. To tackle these challenges, we propose Omni-Effects, a first unified framework capable of generating prompt-guided effects and spatially controllable composite effects. The core of our framework comprises two key innovations: (1) LoRA-based Mixture of Experts (LoRA-MoE), which employs a group of expert LoRAs, integrating diverse effects within a unified model while effectively mitigating cross-task interference. (2) Spatial-Aware Prompt (SAP) incorporates spatial mask information into the text token, enabling precise spatial control. Furthermore, we introduce an Independent-Information Flow (IIF) module integrated within the SAP, isolating the control signals corresponding to individual effects to prevent any unwanted blending. To facilitate this research, we construct a comprehensive VFX dataset Omni-VFX via a novel data collection pipeline combining image editing and First-Last Frame-to-Video (FLF2V) synthesis, and introduce a dedicated VFX evaluation framework for validating model performance. Extensive experiments demonstrate that Omni-Effects achieves precise spatial control and diverse effect generation, enabling users to specify both the category and location of desired effects.
Autonomous Driving in Unstructured Environments: How Far Have We Come?
Oct 10, 2024
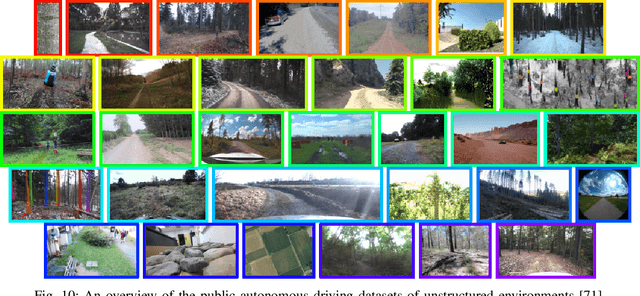
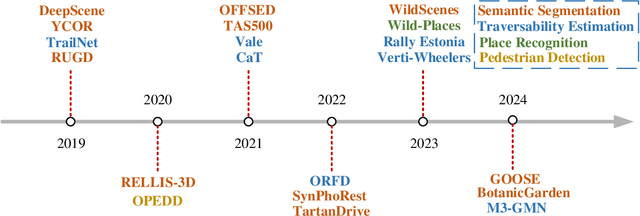
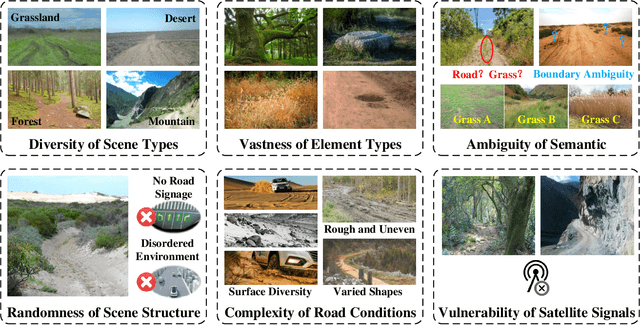
Research on autonomous driving in unstructured outdoor environments is less advanced than in structured urban settings due to challenges like environmental diversities and scene complexity. These environments-such as rural areas and rugged terrains-pose unique obstacles that are not common in structured urban areas. Despite these difficulties, autonomous driving in unstructured outdoor environments is crucial for applications in agriculture, mining, and military operations. Our survey reviews over 250 papers for autonomous driving in unstructured outdoor environments, covering offline mapping, pose estimation, environmental perception, path planning, end-to-end autonomous driving, datasets, and relevant challenges. We also discuss emerging trends and future research directions. This review aims to consolidate knowledge and encourage further research for autonomous driving in unstructured environments. To support ongoing work, we maintain an active repository with up-to-date literature and open-source projects at: https://github.com/chaytonmin/Survey-Autonomous-Driving-in-Unstructured-Environments.
PID: Physics-Informed Diffusion Model for Infrared Image Generation
Jul 12, 2024



Infrared imaging technology has gained significant attention for its reliable sensing ability in low visibility conditions, prompting many studies to convert the abundant RGB images to infrared images. However, most existing image translation methods treat infrared images as a stylistic variation, neglecting the underlying physical laws, which limits their practical application. To address these issues, we propose a Physics-Informed Diffusion (PID) model for translating RGB images to infrared images that adhere to physical laws. Our method leverages the iterative optimization of the diffusion model and incorporates strong physical constraints based on prior knowledge of infrared laws during training. This approach enhances the similarity between translated infrared images and the real infrared domain without increasing extra training parameters. Experimental results demonstrate that PID significantly outperforms existing state-of-the-art methods. Our code is available at https://github.com/fangyuanmao/PID.