 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWildOcc: A Benchmark for Off-Road 3D Semantic Occupancy Prediction
Oct 21, 20243D semantic occupancy prediction is an essential part of autonomous driving, focusing on capturing the geometric details of scenes. Off-road environments are rich in geometric information, therefore it is suitable for 3D semantic occupancy prediction tasks to reconstruct such scenes. However, most of researches concentrate on on-road environments, and few methods are designed for off-road 3D semantic occupancy prediction due to the lack of relevant datasets and benchmarks. In response to this gap, we introduce WildOcc, to our knowledge, the first benchmark to provide dense occupancy annotations for off-road 3D semantic occupancy prediction tasks. A ground truth generation pipeline is proposed in this paper, which employs a coarse-to-fine reconstruction to achieve a more realistic result. Moreover, we introduce a multi-modal 3D semantic occupancy prediction framework, which fuses spatio-temporal information from multi-frame images and point clouds at voxel level. In addition, a cross-modality distillation function is introduced, which transfers geometric knowledge from point clouds to image features.
Autonomous Driving in Unstructured Environments: How Far Have We Come?
Oct 10, 2024
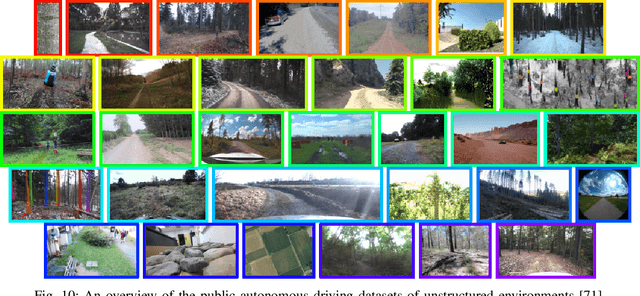
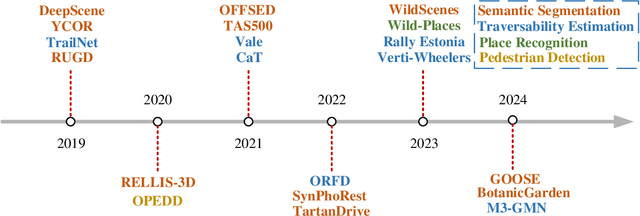
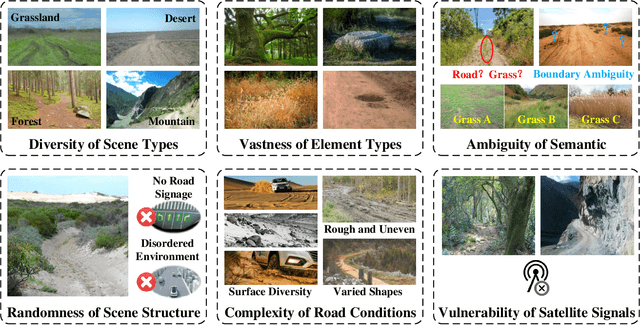
Research on autonomous driving in unstructured outdoor environments is less advanced than in structured urban settings due to challenges like environmental diversities and scene complexity. These environments-such as rural areas and rugged terrains-pose unique obstacles that are not common in structured urban areas. Despite these difficulties, autonomous driving in unstructured outdoor environments is crucial for applications in agriculture, mining, and military operations. Our survey reviews over 250 papers for autonomous driving in unstructured outdoor environments, covering offline mapping, pose estimation, environmental perception, path planning, end-to-end autonomous driving, datasets, and relevant challenges. We also discuss emerging trends and future research directions. This review aims to consolidate knowledge and encourage further research for autonomous driving in unstructured environments. To support ongoing work, we maintain an active repository with up-to-date literature and open-source projects at: https://github.com/chaytonmin/Survey-Autonomous-Driving-in-Unstructured-Environments.