 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBetter Later Than Sooner: Neuro-Symbolic Knowledge Graph Construction via Ontology-grounded Post-extraction Correction
May 27, 2026Question answering (QA) is a core challenge in AI, particularly for complex queries requiring multi-hop reasoning across documents, or symbolic operations like aggregation or exhaustive listing. Retrieval-augmented generation has become the dominant approach to QA, with recent graph-based variants addressing part of these issues by organizing knowledge to better support compositional questions. However, most textual graph-based RAG methods still lack the structure needed for symbolic operations useful to answer complex questions reliably. This motivates symbolic graph-based approaches, which extract knowledge graphs (KGs) whose relations are logic predicates that enable SQL-like querying. Yet these pipelines typically use LLMs for KG extraction, which can introduce consistency issues, where extracted facts may violate commonsense ontology constraints. We propose a neuro-symbolic framework for ontology-grounded KG construction combining open-domain extraction, embedding-based canonicalization of types and predicates, and targeted LLM-based correction of ontology violations. By deferring corrections to a post-extraction stage, our method avoids repeated LLM calls, substantially reducing token usage while improving KG consistency and preserving downstream QA quality. Finally, we show that the extracted KGs are well suited for symbolic querying by measuring the occurrence of SPARQL graph patterns.
Query Symbolically or Retrieve Semantically? A Dataset and Method for Semi-Structured Question Answering
May 26, 2026Retrieval-Augmented Generation (RAG) systems for question answering typically retrieve evidence by semantic similarity between the query and document chunks. While effective for unstructured text, this approach is less reliable on semi-structured corpora where answering may require exact filtering, aggregation, or exhaustive retrieval over structured attributes across multiple documents. Symbolic approaches support such operations, but they are often brittle on noisy natural-language corpora. We address this gap with DualGraph, a RAG framework that represents documents through two complementary views: a Textual Knowledge Graph for semantic retrieval and a Symbolic Knowledge Graph for symbolic querying over typed subject--predicate--object triples. Building on these two components, we provide multiple strategies for selecting or combining semantic and symbolic evidence.We also introduce SpecsQA, a benchmark from a commercial shopping website with semi-structured product documents and manually curated questions spanning open-ended and specification-oriented retrieval. Experiments show that DualGraph consistently outperforms state-of-the-art dense-retrieval, GraphRAG, symbolic, and table-oriented baselines across question types.Code and data are available at https://github.com/corneliocristina/DualGraphRAG.
Hierarchical Planning for Complex Tasks with Knowledge Graph-RAG and Symbolic Verification
Apr 06, 2025Large Language Models (LLMs) have shown promise as robotic planners but often struggle with long-horizon and complex tasks, especially in specialized environments requiring external knowledge. While hierarchical planning and Retrieval-Augmented Generation (RAG) address some of these challenges, they remain insufficient on their own and a deeper integration is required for achieving more reliable systems. To this end, we propose a neuro-symbolic approach that enhances LLMs-based planners with Knowledge Graph-based RAG for hierarchical plan generation. This method decomposes complex tasks into manageable subtasks, further expanded into executable atomic action sequences. To ensure formal correctness and proper decomposition, we integrate a Symbolic Validator, which also functions as a failure detector by aligning expected and observed world states. Our evaluation against baseline methods demonstrates the consistent significant advantages of integrating hierarchical planning, symbolic verification, and RAG across tasks of varying complexity and different LLMs. Additionally, our experimental setup and novel metrics not only validate our approach for complex planning but also serve as a tool for assessing LLMs' reasoning and compositional capabilities.
Recover: A Neuro-Symbolic Framework for Failure Detection and Recovery
Mar 31, 2024Recognizing failures during task execution and implementing recovery procedures is challenging in robotics. Traditional approaches rely on the availability of extensive data or a tight set of constraints, while more recent approaches leverage large language models (LLMs) to verify task steps and replan accordingly. However, these methods often operate offline, necessitating scene resets and incurring in high costs. This paper introduces Recover, a neuro-symbolic framework for online failure identification and recovery. By integrating ontologies, logical rules, and LLM-based planners, Recover exploits symbolic information to enhance the ability of LLMs to generate recovery plans and also to decrease the associated costs. In order to demonstrate the capabilities of our method in a simulated kitchen environment, we introduce OntoThor, an ontology describing the AI2Thor simulator setting. Empirical evaluation shows that OntoThor's logical rules accurately detect all failures in the analyzed tasks, and that Recover considerably outperforms, for both failure detection and recovery, a baseline method reliant solely on LLMs.
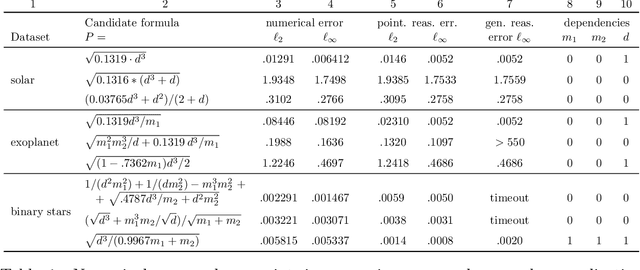
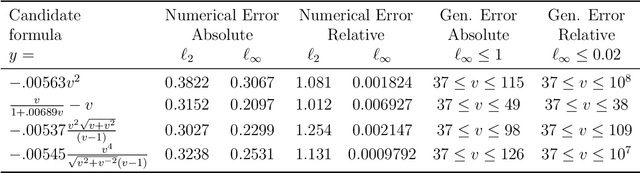
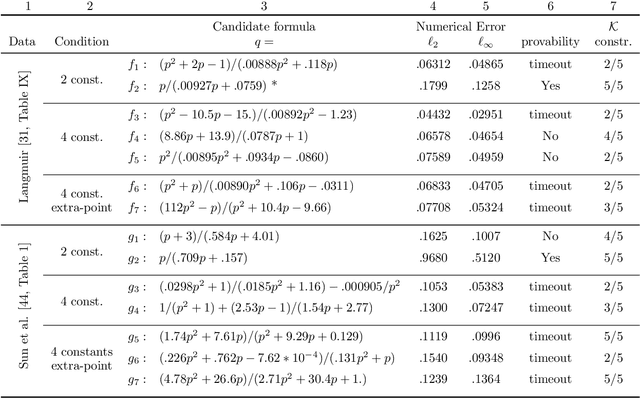
AI Hilbert: From Data and Background Knowledge to Automated Scientific Discovery
Aug 18, 2023The discovery of scientific formulae that parsimoniously explain natural phenomena and align with existing background theory is a key goal in science. Historically, scientists have derived natural laws by manipulating equations based on existing knowledge, forming new equations, and verifying them experimentally. In recent years, data-driven scientific discovery has emerged as a viable competitor in settings with large amounts of experimental data. Unfortunately, data-driven methods often fail to discover valid laws when data is noisy or scarce. Accordingly, recent works combine regression and reasoning to eliminate formulae inconsistent with background theory. However, the problem of searching over the space of formulae consistent with background theory to find one that fits the data best is not well solved. We propose a solution to this problem when all axioms and scientific laws are expressible via polynomial equalities and inequalities and argue that our approach is widely applicable. We further model notions of minimal complexity using binary variables and logical constraints, solve polynomial optimization problems via mixed-integer linear or semidefinite optimization, and automatically prove the validity of our scientific discoveries via Positivestellensatz certificates. Remarkably, the optimization techniques leveraged in this paper allow our approach to run in polynomial time with fully correct background theory, or non-deterministic polynomial (NP) time with partially correct background theory. We experimentally demonstrate that some famous scientific laws, including Kepler's Third Law of Planetary Motion, the Hagen-Poiseuille Equation, and the Radiated Gravitational Wave Power equation, can be automatically derived from sets of partially correct background axioms.
Bayesian Experimental Design for Symbolic Discovery
Nov 29, 2022This study concerns the formulation and application of Bayesian optimal experimental design to symbolic discovery, which is the inference from observational data of predictive models taking general functional forms. We apply constrained first-order methods to optimize an appropriate selection criterion, using Hamiltonian Monte Carlo to sample from the prior. A step for computing the predictive distribution, involving convolution, is computed via either numerical integration, or via fast transform methods.
Integration of Data and Theory for Accelerated Derivable Symbolic Discovery
Sep 03, 2021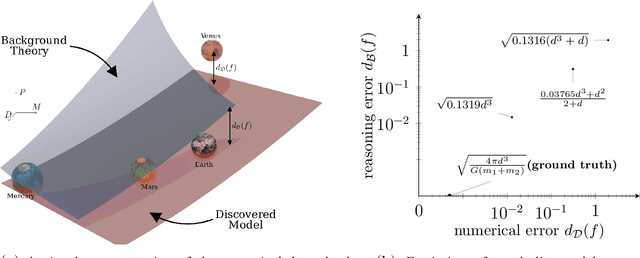
Scientists have long aimed to discover meaningful equations which accurately describe data. Machine learning algorithms automate construction of accurate data-driven models, but ensuring that these are consistent with existing knowledge is a challenge. We developed a methodology combining automated theorem proving with symbolic regression, enabling principled derivations of laws of nature. We demonstrate this for Kepler's third law, Einstein's relativistic time dilation, and Langmuir's theory of adsorption, in each case, automatically connecting experimental data with background theory. The combination of logical reasoning with machine learning provides generalizable insights into key aspects of the natural phenomena.
Learning to Guide a Saturation-Based Theorem Prover
Jun 07, 2021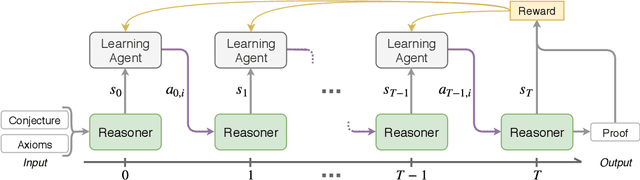
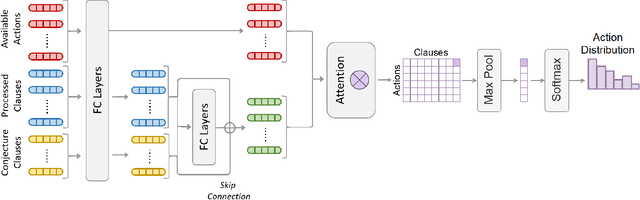
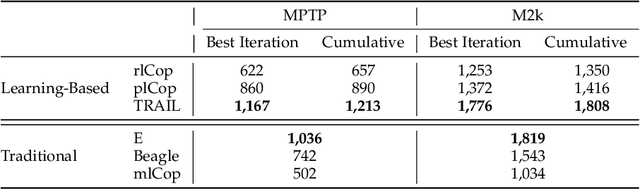
Traditional automated theorem provers have relied on manually tuned heuristics to guide how they perform proof search. Recently, however, there has been a surge of interest in the design of learning mechanisms that can be integrated into theorem provers to improve their performance automatically. In this work, we introduce TRAIL, a deep learning-based approach to theorem proving that characterizes core elements of saturation-based theorem proving within a neural framework. TRAIL leverages (a) an effective graph neural network for representing logical formulas, (b) a novel neural representation of the state of a saturation-based theorem prover in terms of processed clauses and available actions, and (c) a novel representation of the inference selection process as an attention-based action policy. We show through a systematic analysis that these components allow TRAIL to significantly outperform previous reinforcement learning-based theorem provers on two standard benchmark datasets (up to 36% more theorems proved). In addition, to the best of our knowledge, TRAIL is the first reinforcement learning-based approach to exceed the performance of a state-of-the-art traditional theorem prover on a standard theorem proving benchmark (solving up to 17% more problems).
Question Answering over Knowledge Bases by Leveraging Semantic Parsing and Neuro-Symbolic Reasoning
Dec 03, 2020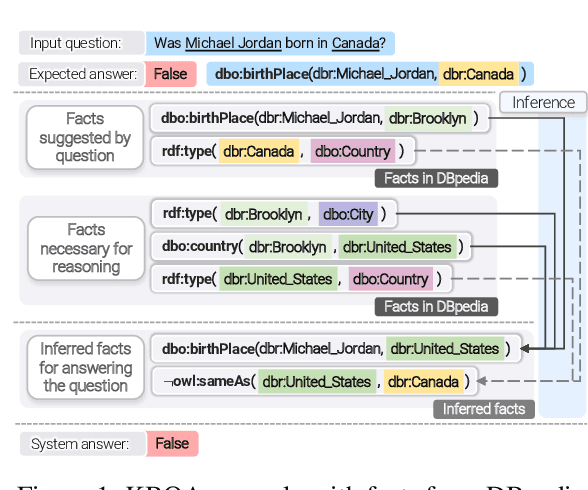
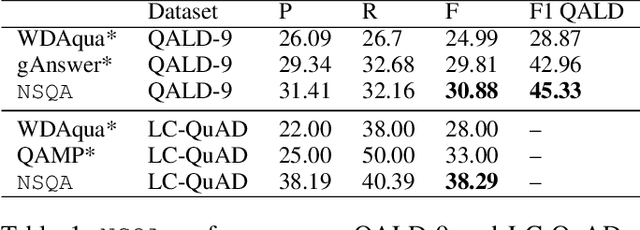
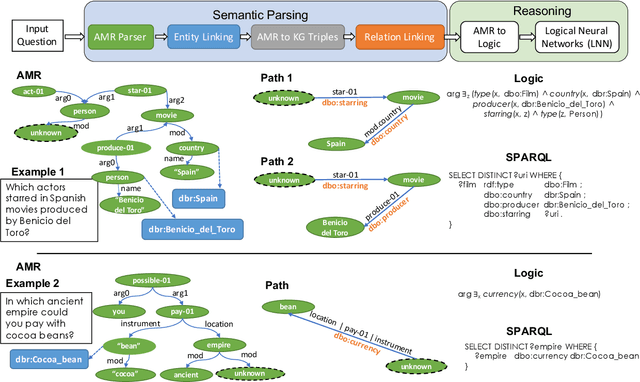
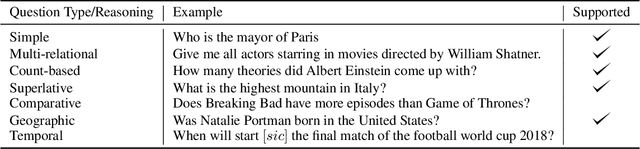
Knowledge base question answering (KBQA) is an important task in Natural Language Processing. Existing approaches face significant challenges including complex question understanding, necessity for reasoning, and lack of large training datasets. In this work, we propose a semantic parsing and reasoning-based Neuro-Symbolic Question Answering(NSQA) system, that leverages (1) Abstract Meaning Representation (AMR) parses for task-independent question under-standing; (2) a novel path-based approach to transform AMR parses into candidate logical queries that are aligned to the KB; (3) a neuro-symbolic reasoner called Logical Neural Net-work (LNN) that executes logical queries and reasons over KB facts to provide an answer; (4) system of systems approach,which integrates multiple, reusable modules that are trained specifically for their individual tasks (e.g. semantic parsing,entity linking, and relationship linking) and do not require end-to-end training data. NSQA achieves state-of-the-art performance on QALD-9 and LC-QuAD 1.0. NSQA's novelty lies in its modular neuro-symbolic architecture and its task-general approach to interpreting natural language questions.
Symbolic Regression using Mixed-Integer Nonlinear Optimization
Jun 11, 2020
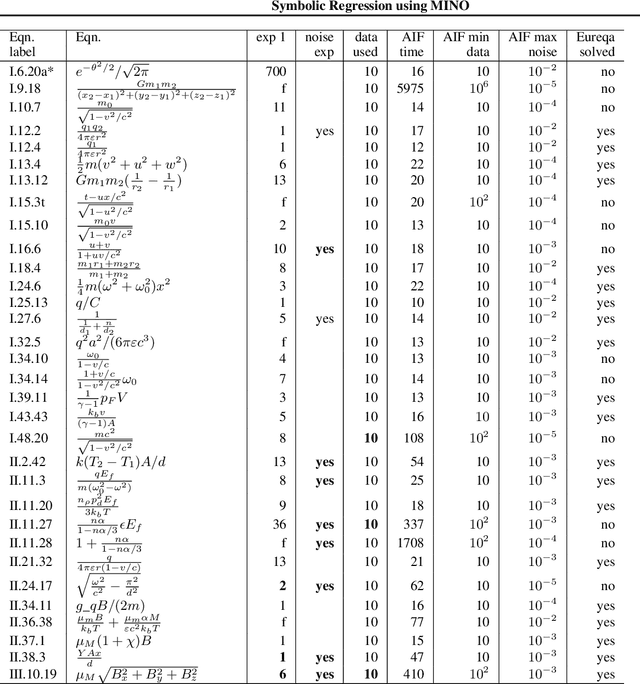
The Symbolic Regression (SR) problem, where the goal is to find a regression function that does not have a pre-specified form but is any function that can be composed of a list of operators, is a hard problem in machine learning, both theoretically and computationally. Genetic programming based methods, that heuristically search over a very large space of functions, are the most commonly used methods to tackle SR problems. An alternative mathematical programming approach, proposed in the last decade, is to express the optimal symbolic expression as the solution of a system of nonlinear equations over continuous and discrete variables that minimizes a certain objective, and to solve this system via a global solver for mixed-integer nonlinear programming problems. Algorithms based on the latter approach are often very slow. We propose a hybrid algorithm that combines mixed-integer nonlinear optimization with explicit enumeration and incorporates constraints from dimensional analysis. We show that our algorithm is competitive, for some synthetic data sets, with a state-of-the-art SR software and a recent physics-inspired method called AI Feynman.