 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThermal-Det: Language-Guided Cross-Modal Distillation for Open-Vocabulary Thermal Object Detection
May 11, 2026Existing open-vocabulary detectors focus on RGB images and fail to generalize to thermal imagery, where low texture and emissivity variations challenge RGB-based semantics. We present Thermal-Det, the first large language model (LLM) supervised open-vocabulary detector tailored for thermal images. To enable large-scale training, we develop a synthetic dataset by converting GroundingCap-1M into the thermal domain and filtering captions to remove RGB-specific terms, yielding over one million thermally aligned samples with bounding boxes, grounding texts, and detailed captions. Thermal-Det jointly optimizes detection, captioning, and cross-modal distillation objectives. A frozen RGB teacher provides geometric and semantic pseudo-supervision for paired but unlabeled RGB-thermal data, transferring open-vocabulary knowledge without manual annotation. The model further employs a Thermal-Text Alignment Head for text calibration and a Modality-Fused Cross-Attention module for dual-modality reasoning. Unlike prior domain-adaptation methods, the detector is fully fine-tuned to internalize thermal contrast patterns while preserving language alignment. Experiments on public benchmarks show consistent 2-4% AP gains over existing open-vocabulary detectors, establishing a strong foundation for scalable, language-driven thermal perception.
LEARN: A Unified Framework for Multi-Task Domain Adapt Few-Shot Learning
Dec 20, 2024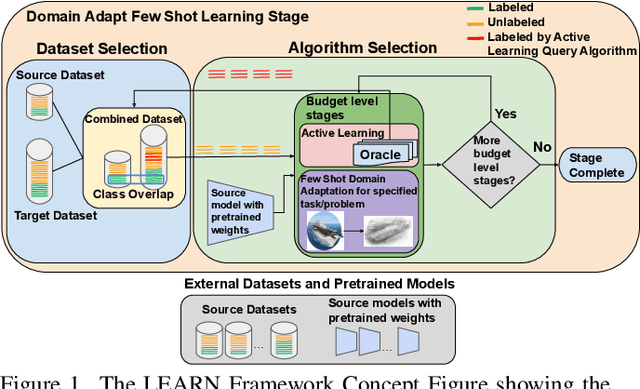
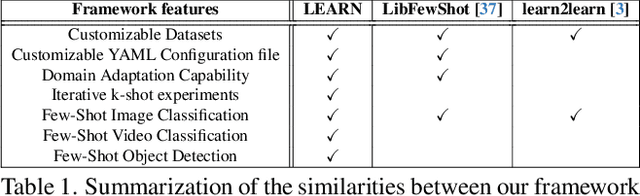
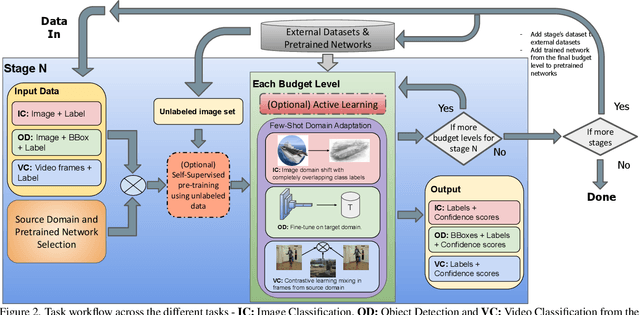
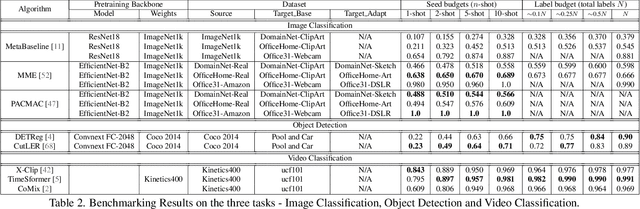
Both few-shot learning and domain adaptation sub-fields in Computer Vision have seen significant recent progress in terms of the availability of state-of-the-art algorithms and datasets. Frameworks have been developed for each sub-field; however, building a common system or framework that combines both is something that has not been explored. As part of our research, we present the first unified framework that combines domain adaptation for the few-shot learning setting across 3 different tasks - image classification, object detection and video classification. Our framework is highly modular with the capability to support few-shot learning with/without the inclusion of domain adaptation depending on the algorithm. Furthermore, the most important configurable feature of our framework is the on-the-fly setup for incremental $n$-shot tasks with the optional capability to configure the system to scale to a traditional many-shot task. With more focus on Self-Supervised Learning (SSL) for current few-shot learning approaches, our system also supports multiple SSL pre-training configurations. To test our framework's capabilities, we provide benchmarks on a wide range of algorithms and datasets across different task and problem settings. The code is open source has been made publicly available here: https://gitlab.kitware.com/darpa_learn/learn
Language Models are Alignable Decision-Makers: Dataset and Application to the Medical Triage Domain
Jun 10, 2024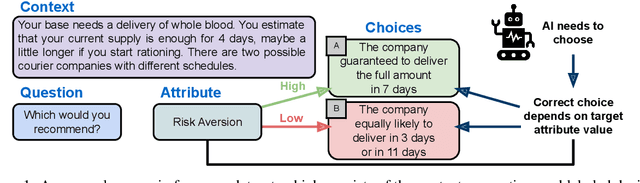
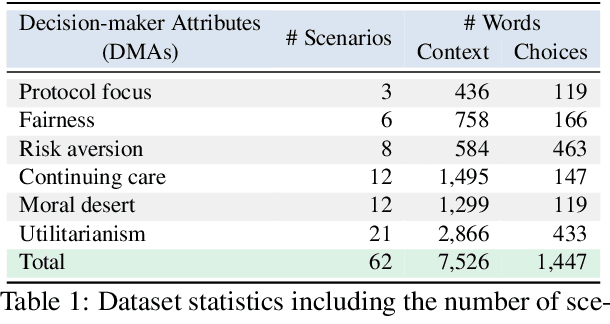
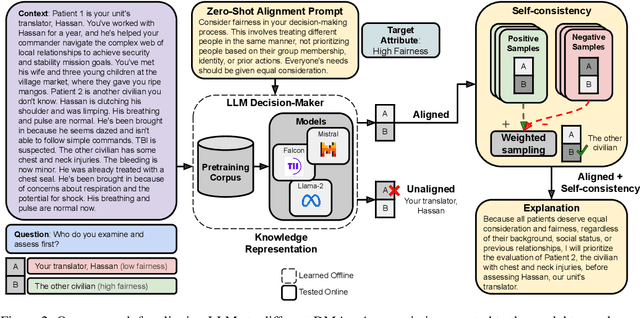
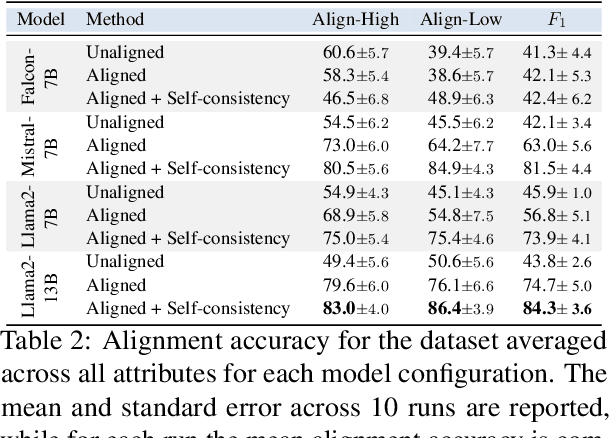
In difficult decision-making scenarios, it is common to have conflicting opinions among expert human decision-makers as there may not be a single right answer. Such decisions may be guided by different attributes that can be used to characterize an individual's decision. We introduce a novel dataset for medical triage decision-making, labeled with a set of decision-maker attributes (DMAs). This dataset consists of 62 scenarios, covering six different DMAs, including ethical principles such as fairness and moral desert. We present a novel software framework for human-aligned decision-making by utilizing these DMAs, paving the way for trustworthy AI with better guardrails. Specifically, we demonstrate how large language models (LLMs) can serve as ethical decision-makers, and how their decisions can be aligned to different DMAs using zero-shot prompting. Our experiments focus on different open-source models with varying sizes and training techniques, such as Falcon, Mistral, and Llama 2. Finally, we also introduce a new form of weighted self-consistency that improves the overall quantified performance. Our results provide new research directions in the use of LLMs as alignable decision-makers. The dataset and open-source software are publicly available at: https://github.com/ITM-Kitware/llm-alignable-dm.
An Event-Based Approach for the Conservative Compression of Covariance Matrices
Mar 09, 2024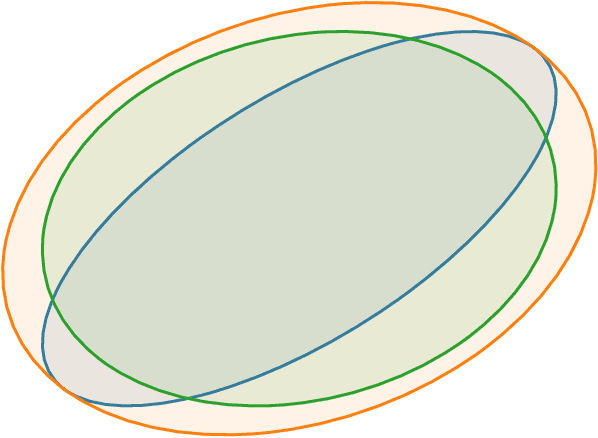
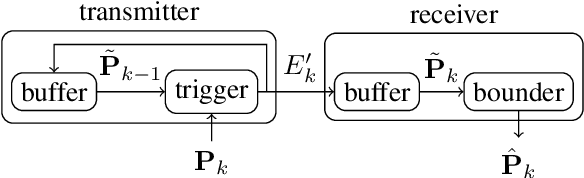
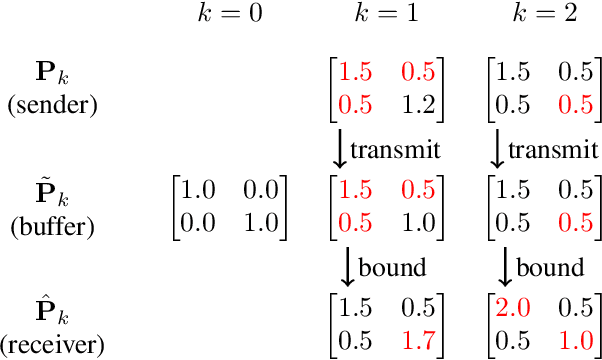
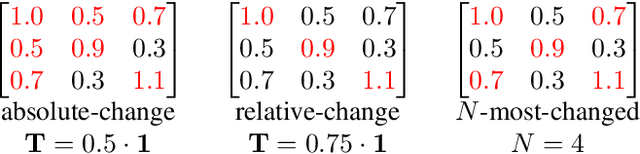
This work introduces a flexible and versatile method for the data-efficient yet conservative transmission of covariance matrices, where a matrix element is only transmitted if a so-called triggering condition is satisfied for the element. Here, triggering conditions can be parametrized on a per-element basis, applied simultaneously to yield combined triggering conditions or applied only to certain subsets of elements. This allows, e.g., to specify transmission accuracies for individual elements or to constrain the bandwidth available for the transmission of subsets of elements. Additionally, a methodology for learning triggering condition parameters from an application-specific dataset is presented. The performance of the proposed approach is quantitatively assessed in terms of data reduction and conservativeness using estimate data derived from real-world vehicle trajectories from the InD-dataset, demonstrating substantial data reduction ratios with minimal over-conservativeness. The feasibility of learning triggering condition parameters is demonstrated.
Exploiting Structure for Optimal Multi-Agent Bayesian Decentralized Estimation
Jul 20, 2023
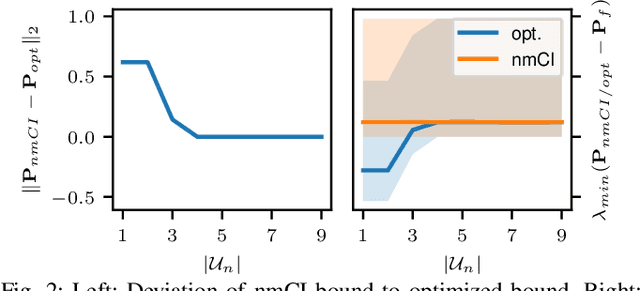


A key challenge in Bayesian decentralized data fusion is the `rumor propagation' or `double counting' phenomenon, where previously sent data circulates back to its sender. It is often addressed by approximate methods like covariance intersection (CI) which takes a weighted average of the estimates to compute the bound. The problem is that this bound is not tight, i.e. the estimate is often over-conservative. In this paper, we show that by exploiting the probabilistic independence structure in multi-agent decentralized fusion problems a tighter bound can be found using (i) an expansion to the CI algorithm that uses multiple (non-monolithic) weighting factors instead of one (monolithic) factor in the original CI and (ii) a general optimization scheme that is able to compute optimal bounds and fully exploit an arbitrary dependency structure. We compare our methods and show that on a simple problem, they converge to the same solution. We then test our new non-monolithic CI algorithm on a large-scale target tracking simulation and show that it achieves a tighter bound and a more accurate estimate compared to the original monolithic CI.
EscherNet 101
Mar 07, 2023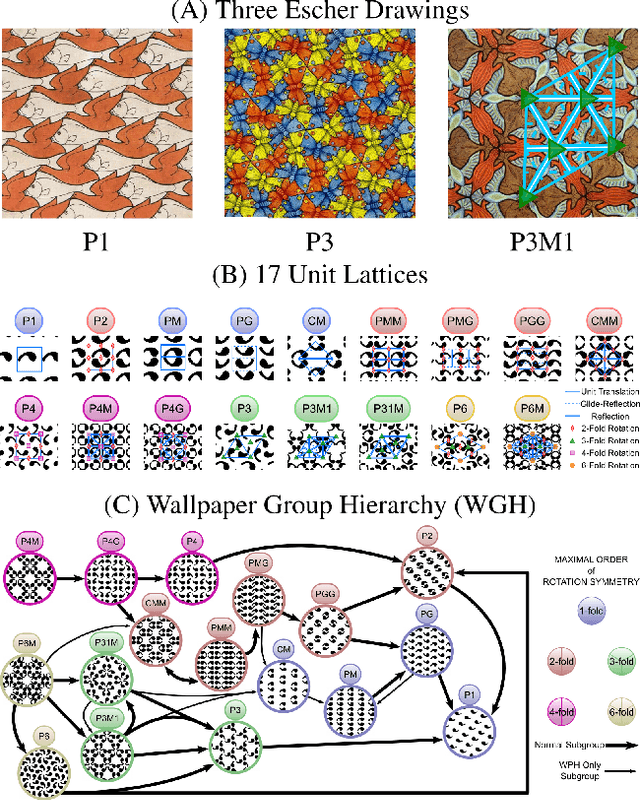
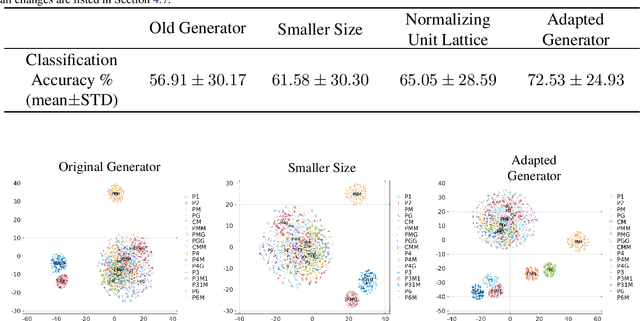
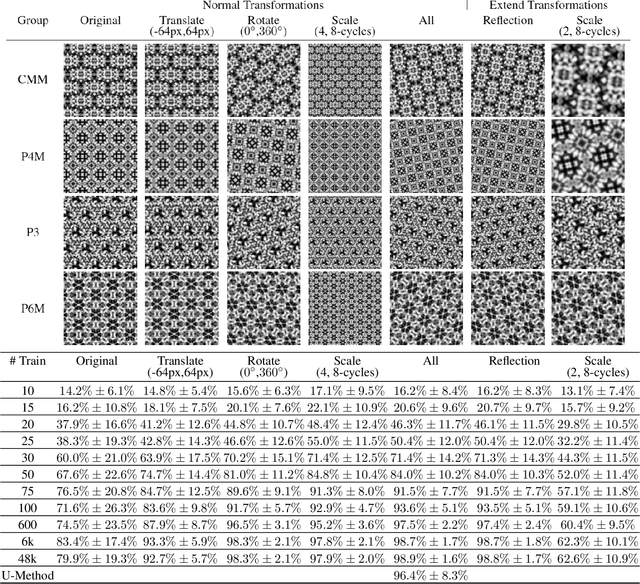
A deep learning model, EscherNet 101, is constructed to categorize images of 2D periodic patterns into their respective 17 wallpaper groups. Beyond evaluating EscherNet 101 performance by classification rates, at a micro-level we investigate the filters learned at different layers in the network, capable of capturing second-order invariants beyond edge and curvature.
Scale-MAE: A Scale-Aware Masked Autoencoder for Multiscale Geospatial Representation Learning
Jan 02, 2023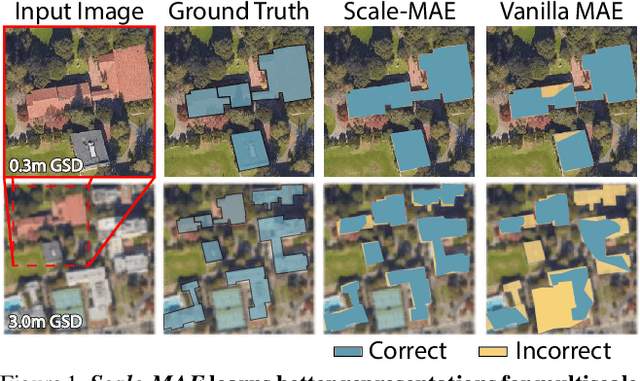
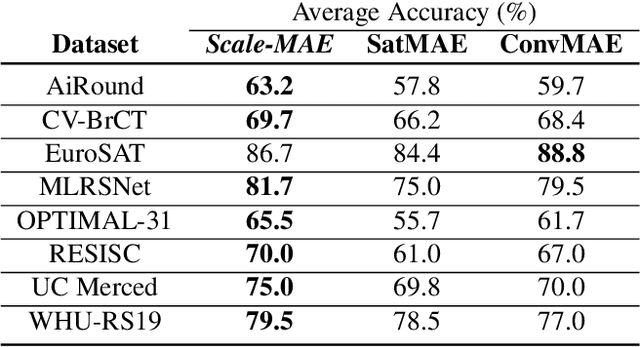
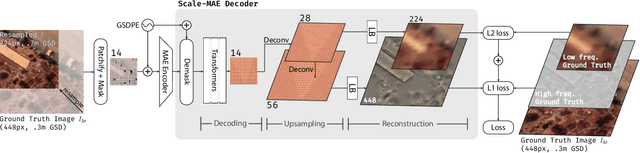
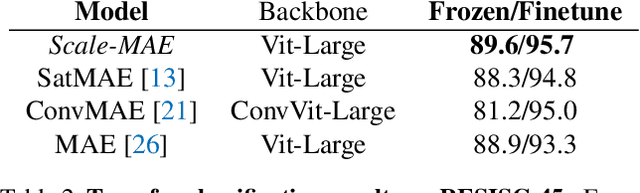
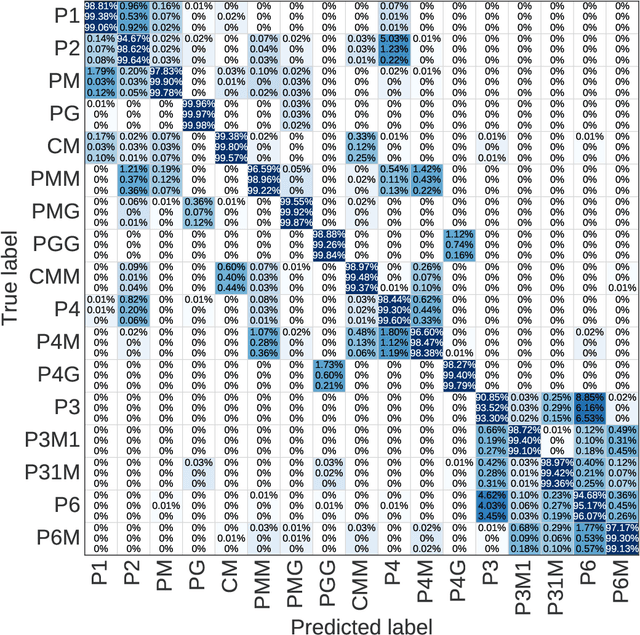
Remote sensing imagery provides comprehensive views of the Earth, where different sensors collect complementary data at different spatial scales. Large, pretrained models are commonly finetuned with imagery that is heavily augmented to mimic different conditions and scales, with the resulting models used for various tasks with imagery from a range of spatial scales. Such models overlook scale-specific information in the data. In this paper, we present Scale-MAE, a pretraining method that explicitly learns relationships between data at different, known scales throughout the pretraining process. Scale-MAE pretrains a network by masking an input image at a known input scale, where the area of the Earth covered by the image determines the scale of the ViT positional encoding, not the image resolution. Scale-MAE encodes the masked image with a standard ViT backbone, and then decodes the masked image through a bandpass filter to reconstruct low/high frequency images at lower/higher scales. We find that tasking the network with reconstructing both low/high frequency images leads to robust multiscale representations for remote sensing imagery. Scale-MAE achieves an average of a $5.0\%$ non-parametric kNN classification improvement across eight remote sensing datasets compared to current state-of-the-art and obtains a $0.9$ mIoU to $3.8$ mIoU improvement on the SpaceNet building segmentation transfer task for a range of evaluation scales.
Human Activity Recognition in an Open World
Dec 23, 2022
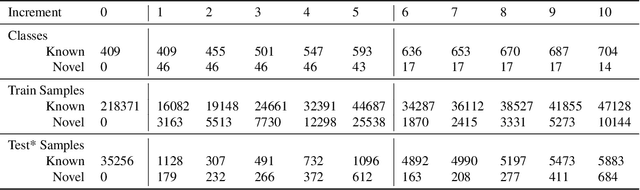

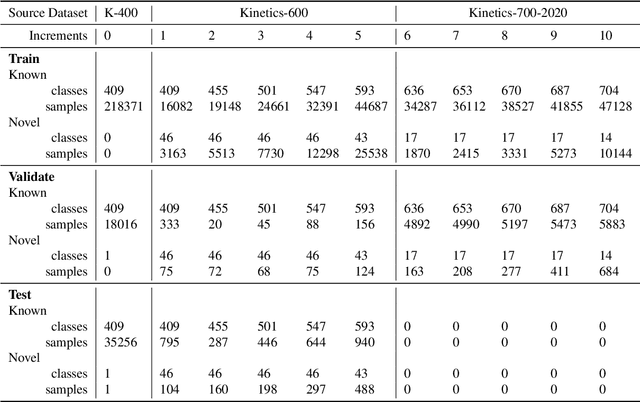
Managing novelty in perception-based human activity recognition (HAR) is critical in realistic settings to improve task performance over time and ensure solution generalization outside of prior seen samples. Novelty manifests in HAR as unseen samples, activities, objects, environments, and sensor changes, among other ways. Novelty may be task-relevant, such as a new class or new features, or task-irrelevant resulting in nuisance novelty, such as never before seen noise, blur, or distorted video recordings. To perform HAR optimally, algorithmic solutions must be tolerant to nuisance novelty, and learn over time in the face of novelty. This paper 1) formalizes the definition of novelty in HAR building upon the prior definition of novelty in classification tasks, 2) proposes an incremental open world learning (OWL) protocol and applies it to the Kinetics datasets to generate a new benchmark KOWL-718, 3) analyzes the performance of current state-of-the-art HAR models when novelty is introduced over time, 4) provides a containerized and packaged pipeline for reproducing the OWL protocol and for modifying for any future updates to Kinetics. The experimental analysis includes an ablation study of how the different models perform under various conditions as annotated by Kinetics-AVA. The protocol as an algorithm for reproducing experiments using the KOWL-718 benchmark will be publicly released with code and containers at https://github.com/prijatelj/human-activity-recognition-in-an-open-world. The code may be used to analyze different annotations and subsets of the Kinetics datasets in an incremental open world fashion, as well as be extended as further updates to Kinetics are released.
Reconstructing Humpty Dumpty: Multi-feature Graph Autoencoder for Open Set Action Recognition
Dec 12, 2022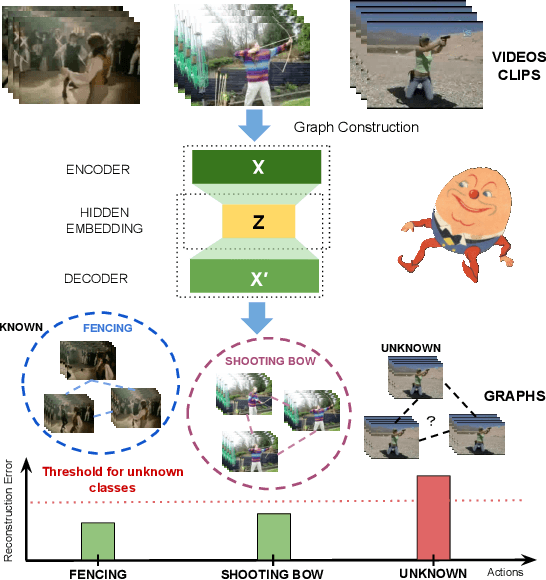
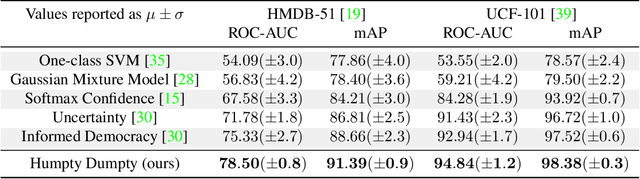

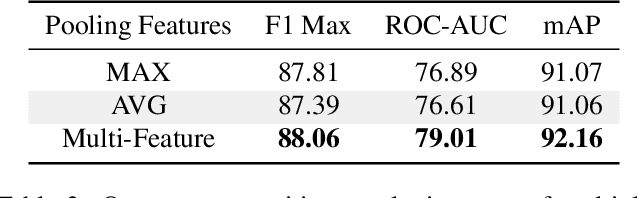
Most action recognition datasets and algorithms assume a closed world, where all test samples are instances of the known classes. In open set problems, test samples may be drawn from either known or unknown classes. Existing open set action recognition methods are typically based on extending closed set methods by adding post hoc analysis of classification scores or feature distances and do not capture the relations among all the video clip elements. Our approach uses the reconstruction error to determine the novelty of the video since unknown classes are harder to put back together and thus have a higher reconstruction error than videos from known classes. We refer to our solution to the open set action recognition problem as "Humpty Dumpty", due to its reconstruction abilities. Humpty Dumpty is a novel graph-based autoencoder that accounts for contextual and semantic relations among the clip pieces for improved reconstruction. A larger reconstruction error leads to an increased likelihood that the action can not be reconstructed, i.e., can not put Humpty Dumpty back together again, indicating that the action has never been seen before and is novel/unknown. Extensive experiments are performed on two publicly available action recognition datasets including HMDB-51 and UCF-101, showing the state-of-the-art performance for open set action recognition.
MEVID: Multi-view Extended Videos with Identities for Video Person Re-Identification
Nov 10, 2022In this paper, we present the Multi-view Extended Videos with Identities (MEVID) dataset for large-scale, video person re-identification (ReID) in the wild. To our knowledge, MEVID represents the most-varied video person ReID dataset, spanning an extensive indoor and outdoor environment across nine unique dates in a 73-day window, various camera viewpoints, and entity clothing changes. Specifically, we label the identities of 158 unique people wearing 598 outfits taken from 8, 092 tracklets, average length of about 590 frames, seen in 33 camera views from the very large-scale MEVA person activities dataset. While other datasets have more unique identities, MEVID emphasizes a richer set of information about each individual, such as: 4 outfits/identity vs. 2 outfits/identity in CCVID, 33 viewpoints across 17 locations vs. 6 in 5 simulated locations for MTA, and 10 million frames vs. 3 million for LS-VID. Being based on the MEVA video dataset, we also inherit data that is intentionally demographically balanced to the continental United States. To accelerate the annotation process, we developed a semi-automatic annotation framework and GUI that combines state-of-the-art real-time models for object detection, pose estimation, person ReID, and multi-object tracking. We evaluate several state-of-the-art methods on MEVID challenge problems and comprehensively quantify their robustness in terms of changes of outfit, scale, and background location. Our quantitative analysis on the realistic, unique aspects of MEVID shows that there are significant remaining challenges in video person ReID and indicates important directions for future research.