 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGaussianGrasper: 3D Language Gaussian Splatting for Open-vocabulary Robotic Grasping
Mar 14, 2024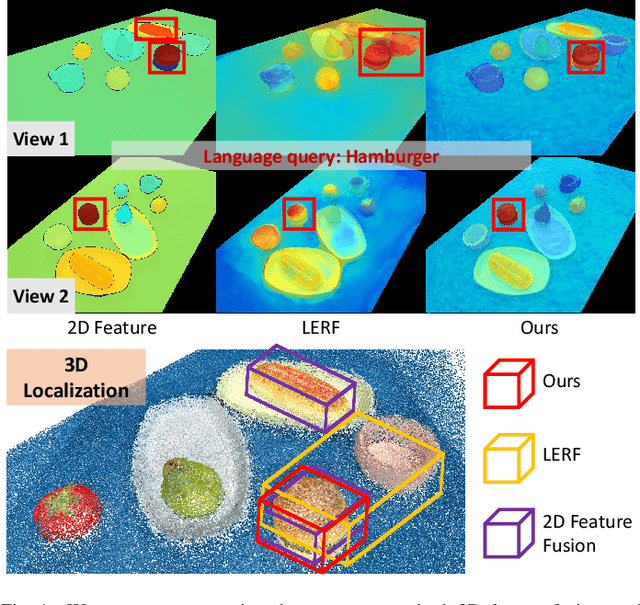
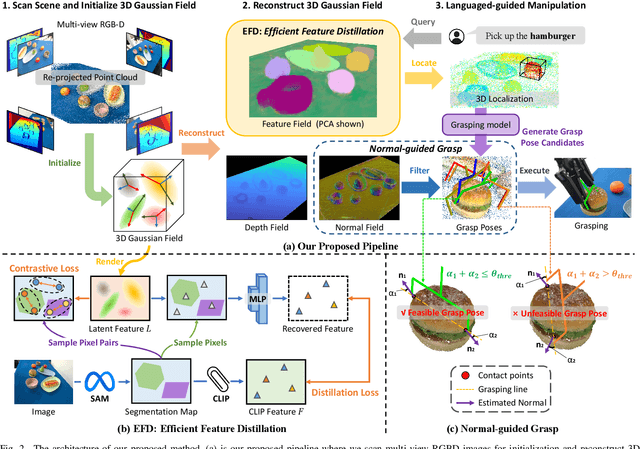
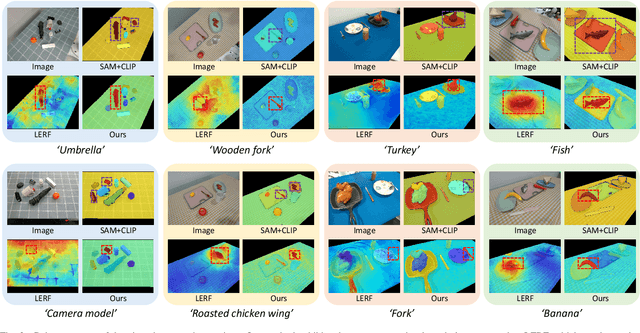
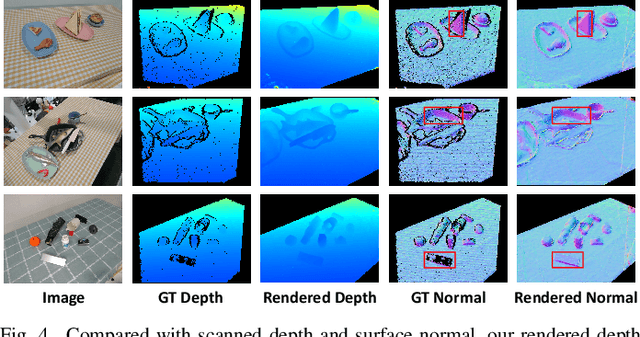
Constructing a 3D scene capable of accommodating open-ended language queries, is a pivotal pursuit, particularly within the domain of robotics. Such technology facilitates robots in executing object manipulations based on human language directives. To tackle this challenge, some research efforts have been dedicated to the development of language-embedded implicit fields. However, implicit fields (e.g. NeRF) encounter limitations due to the necessity of processing a large number of input views for reconstruction, coupled with their inherent inefficiencies in inference. Thus, we present the GaussianGrasper, which utilizes 3D Gaussian Splatting to explicitly represent the scene as a collection of Gaussian primitives. Our approach takes a limited set of RGB-D views and employs a tile-based splatting technique to create a feature field. In particular, we propose an Efficient Feature Distillation (EFD) module that employs contrastive learning to efficiently and accurately distill language embeddings derived from foundational models. With the reconstructed geometry of the Gaussian field, our method enables the pre-trained grasping model to generate collision-free grasp pose candidates. Furthermore, we propose a normal-guided grasp module to select the best grasp pose. Through comprehensive real-world experiments, we demonstrate that GaussianGrasper enables robots to accurately query and grasp objects with language instructions, providing a new solution for language-guided manipulation tasks. Data and codes can be available at https://github.com/MrSecant/GaussianGrasper.
MonoOcc: Digging into Monocular Semantic Occupancy Prediction
Mar 13, 2024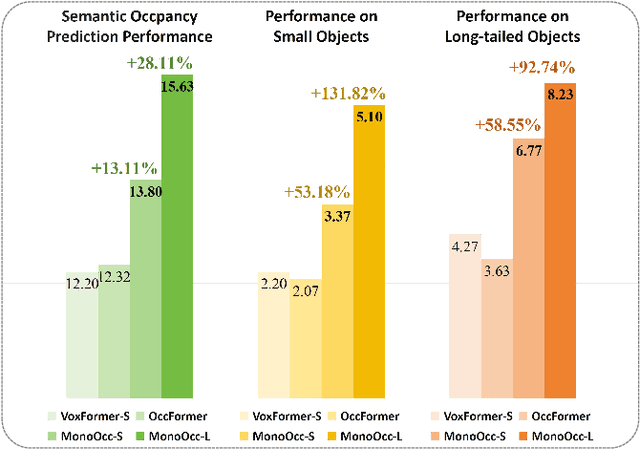
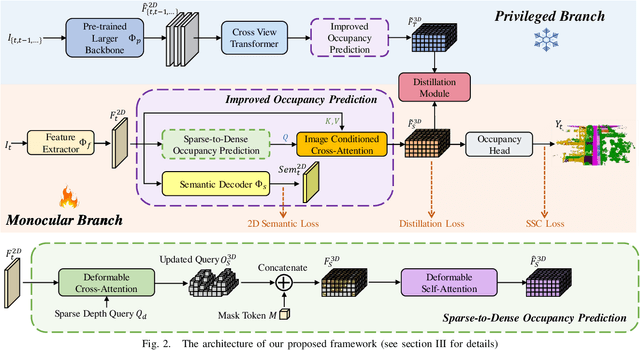
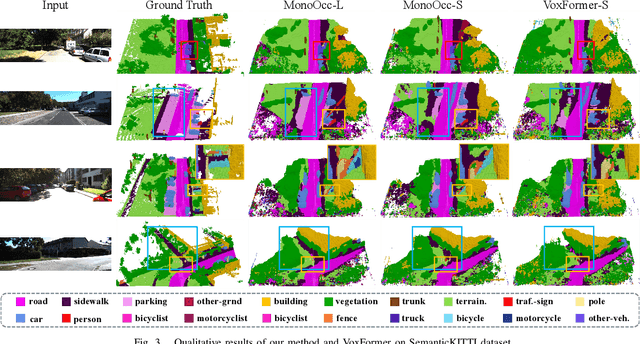
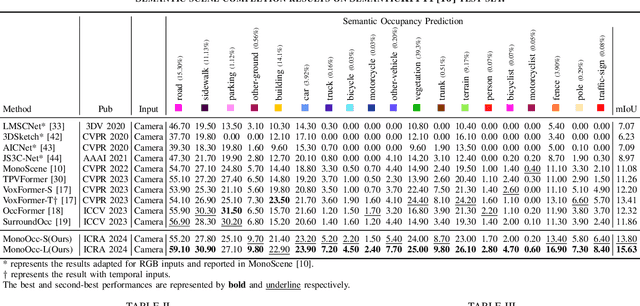
Monocular Semantic Occupancy Prediction aims to infer the complete 3D geometry and semantic information of scenes from only 2D images. It has garnered significant attention, particularly due to its potential to enhance the 3D perception of autonomous vehicles. However, existing methods rely on a complex cascaded framework with relatively limited information to restore 3D scenes, including a dependency on supervision solely on the whole network's output, single-frame input, and the utilization of a small backbone. These challenges, in turn, hinder the optimization of the framework and yield inferior prediction results, particularly concerning smaller and long-tailed objects. To address these issues, we propose MonoOcc. In particular, we (i) improve the monocular occupancy prediction framework by proposing an auxiliary semantic loss as supervision to the shallow layers of the framework and an image-conditioned cross-attention module to refine voxel features with visual clues, and (ii) employ a distillation module that transfers temporal information and richer knowledge from a larger image backbone to the monocular semantic occupancy prediction framework with low cost of hardware. With these advantages, our method yields state-of-the-art performance on the camera-based SemanticKITTI Scene Completion benchmark. Codes and models can be accessed at https://github.com/ucaszyp/MonoOcc
3D Implicit Transporter for Temporally Consistent Keypoint Discovery
Sep 10, 2023



Keypoint-based representation has proven advantageous in various visual and robotic tasks. However, the existing 2D and 3D methods for detecting keypoints mainly rely on geometric consistency to achieve spatial alignment, neglecting temporal consistency. To address this issue, the Transporter method was introduced for 2D data, which reconstructs the target frame from the source frame to incorporate both spatial and temporal information. However, the direct application of the Transporter to 3D point clouds is infeasible due to their structural differences from 2D images. Thus, we propose the first 3D version of the Transporter, which leverages hybrid 3D representation, cross attention, and implicit reconstruction. We apply this new learning system on 3D articulated objects and nonrigid animals (humans and rodents) and show that learned keypoints are spatio-temporally consistent. Additionally, we propose a closed-loop control strategy that utilizes the learned keypoints for 3D object manipulation and demonstrate its superior performance. Codes are available at https://github.com/zhongcl-thu/3D-Implicit-Transporter.
STEPS: Joint Self-supervised Nighttime Image Enhancement and Depth Estimation
Feb 02, 2023Self-supervised depth estimation draws a lot of attention recently as it can promote the 3D sensing capabilities of self-driving vehicles. However, it intrinsically relies upon the photometric consistency assumption, which hardly holds during nighttime. Although various supervised nighttime image enhancement methods have been proposed, their generalization performance in challenging driving scenarios is not satisfactory. To this end, we propose the first method that jointly learns a nighttime image enhancer and a depth estimator, without using ground truth for either task. Our method tightly entangles two self-supervised tasks using a newly proposed uncertain pixel masking strategy. This strategy originates from the observation that nighttime images not only suffer from underexposed regions but also from overexposed regions. By fitting a bridge-shaped curve to the illumination map distribution, both regions are suppressed and two tasks are bridged naturally. We benchmark the method on two established datasets: nuScenes and RobotCar and demonstrate state-of-the-art performance on both of them. Detailed ablations also reveal the mechanism of our proposal. Last but not least, to mitigate the problem of sparse ground truth of existing datasets, we provide a new photo-realistically enhanced nighttime dataset based upon CARLA. It brings meaningful new challenges to the community. Codes, data, and models are available at https://github.com/ucaszyp/STEPS.
SNAKE: Shape-aware Neural 3D Keypoint Field
Jun 03, 2022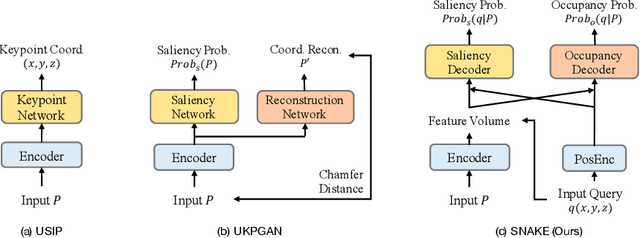
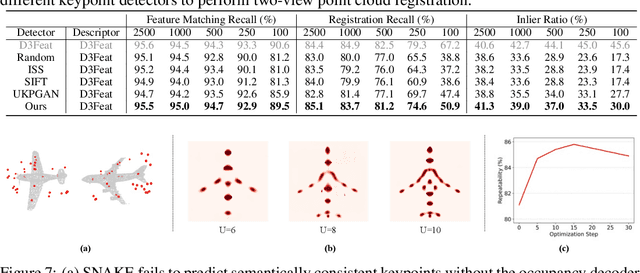
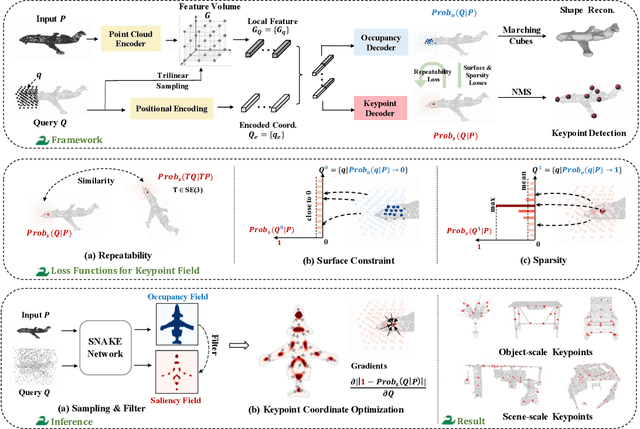
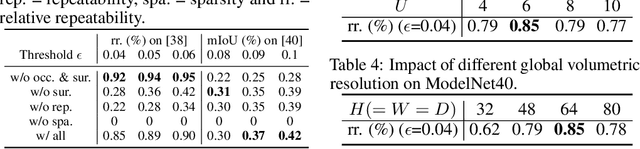
Detecting 3D keypoints from point clouds is important for shape reconstruction, while this work investigates the dual question: can shape reconstruction benefit 3D keypoint detection? Existing methods either seek salient features according to statistics of different orders or learn to predict keypoints that are invariant to transformation. Nevertheless, the idea of incorporating shape reconstruction into 3D keypoint detection is under-explored. We argue that this is restricted by former problem formulations. To this end, a novel unsupervised paradigm named SNAKE is proposed, which is short for shape-aware neural 3D keypoint field. Similar to recent coordinate-based radiance or distance field, our network takes 3D coordinates as inputs and predicts implicit shape indicators and keypoint saliency simultaneously, thus naturally entangling 3D keypoint detection and shape reconstruction. We achieve superior performance on various public benchmarks, including standalone object datasets ModelNet40, KeypointNet, SMPL meshes and scene-level datasets 3DMatch and Redwood. Intrinsic shape awareness brings several advantages as follows. (1) SNAKE generates 3D keypoints consistent with human semantic annotation, even without such supervision. (2) SNAKE outperforms counterparts in terms of repeatability, especially when the input point clouds are down-sampled. (3) the generated keypoints allow accurate geometric registration, notably in a zero-shot setting. Codes are available at https://github.com/zhongcl-thu/SNAKE
Sim2Real Object-Centric Keypoint Detection and Description
Feb 03, 2022


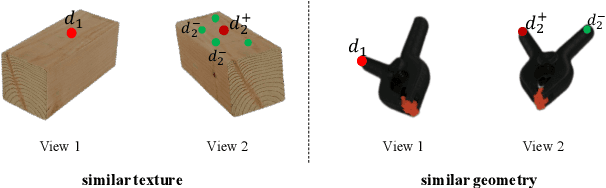
Keypoint detection and description play a central role in computer vision. Most existing methods are in the form of scene-level prediction, without returning the object classes of different keypoints. In this paper, we propose the object-centric formulation, which, beyond the conventional setting, requires further identifying which object each interest point belongs to. With such fine-grained information, our framework enables more downstream potentials, such as object-level matching and pose estimation in a clustered environment. To get around the difficulty of label collection in the real world, we develop a sim2real contrastive learning mechanism that can generalize the model trained in simulation to real-world applications. The novelties of our training method are three-fold: (i) we integrate the uncertainty into the learning framework to improve feature description of hard cases, e.g., less-textured or symmetric patches; (ii) we decouple the object descriptor into two output branches -- intra-object salience and inter-object distinctness, resulting in a better pixel-wise description; (iii) we enforce cross-view semantic consistency for enhanced robustness in representation learning. Comprehensive experiments on image matching and 6D pose estimation verify the encouraging generalization ability of our method from simulation to reality. Particularly for 6D pose estimation, our method significantly outperforms typical unsupervised/sim2real methods, achieving a closer gap with the fully supervised counterpart. Additional results and videos can be found at https://zhongcl-thu.github.io/rock/