 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDe-conflating Preference and Qualification: Constrained Dual-Perspective Reasoning for Job Recommendation with Large Language Models
Feb 03, 2026Professional job recommendation involves a complex bipartite matching process that must reconcile a candidate's subjective preference with an employer's objective qualification. While Large Language Models (LLMs) are well-suited for modeling the rich semantics of resumes and job descriptions, existing paradigms often collapse these two decision dimensions into a single interaction signal, yielding confounded supervision under recruitment-funnel censoring and limiting policy controllability. To address these challenges, We propose JobRec, a generative job recommendation framework for de-conflating preference and qualification via constrained dual-perspective reasoning. JobRec introduces a Unified Semantic Alignment Schema that aligns candidate and job attributes into structured semantic layers, and a Two-Stage Cooperative Training Strategy that learns decoupled experts to separately infer preference and qualification. Building on these experts, a Lagrangian-based Policy Alignment module optimizes recommendations under explicit eligibility requirements, enabling controllable trade-offs. To mitigate data scarcity, we construct a synthetic dataset refined by experts. Experiments show that JobRec consistently outperforms strong baselines and provides improved controllability for strategy-aware professional matching.
NLP for Social Good: A Survey of Challenges, Opportunities, and Responsible Deployment
May 28, 2025



Recent advancements in large language models (LLMs) have unlocked unprecedented possibilities across a range of applications. However, as a community, we believe that the field of Natural Language Processing (NLP) has a growing need to approach deployment with greater intentionality and responsibility. In alignment with the broader vision of AI for Social Good (Toma\v{s}ev et al., 2020), this paper examines the role of NLP in addressing pressing societal challenges. Through a cross-disciplinary analysis of social goals and emerging risks, we highlight promising research directions and outline challenges that must be addressed to ensure responsible and equitable progress in NLP4SG research.
Examining Spanish Counseling with MIDAS: a Motivational Interviewing Dataset in Spanish
Feb 12, 2025



Cultural and language factors significantly influence counseling, but Natural Language Processing research has not yet examined whether the findings of conversational analysis for counseling conducted in English apply to other languages. This paper presents a first step towards this direction. We introduce MIDAS (Motivational Interviewing Dataset in Spanish), a counseling dataset created from public video sources that contains expert annotations for counseling reflections and questions. Using this dataset, we explore language-based differences in counselor behavior in English and Spanish and develop classifiers in monolingual and multilingual settings, demonstrating its applications in counselor behavioral coding tasks.
Real or Robotic? Assessing Whether LLMs Accurately Simulate Qualities of Human Responses in Dialogue
Sep 16, 2024Studying and building datasets for dialogue tasks is both expensive and time-consuming due to the need to recruit, train, and collect data from study participants. In response, much recent work has sought to use large language models (LLMs) to simulate both human-human and human-LLM interactions, as they have been shown to generate convincingly human-like text in many settings. However, to what extent do LLM-based simulations \textit{actually} reflect human dialogues? In this work, we answer this question by generating a large-scale dataset of 100,000 paired LLM-LLM and human-LLM dialogues from the WildChat dataset and quantifying how well the LLM simulations align with their human counterparts. Overall, we find relatively low alignment between simulations and human interactions, demonstrating a systematic divergence along the multiple textual properties, including style and content. Further, in comparisons of English, Chinese, and Russian dialogues, we find that models perform similarly. Our results suggest that LLMs generally perform better when the human themself writes in a way that is more similar to the LLM's own style.
A novel model for layer jamming-based continuum robots
Sep 11, 2023



Continuum robots with variable stiffness have gained wide popularity in the last decade. Layer jamming (LJ) has emerged as a simple and efficient technique to achieve tunable stiffness for continuum robots. Despite its merits, the development of a control-oriented dynamical model tailored for this specific class of robots remains an open problem in the literature. This paper aims to present the first solution, to the best of our knowledge, to close the gap. We propose an energy-based model that is integrated with the LuGre frictional model for LJ-based continuum robots. Then, we take a comprehensive theoretical analysis for this model, focusing on two fundamental characteristics of LJ-based continuum robots: shape locking and adjustable stiffness. To validate the modeling approach and theoretical results, a series of experiments using our \textit{OctRobot-I} continuum robotic platform was conducted. The results show that the proposed model is capable of interpreting and predicting the dynamical behaviors in LJ-based continuum robots.
Simultaneous Position-and-Stiffness Control of Underactuated Antagonistic Tendon-Driven Continuum Robots
Jun 06, 2023Continuum robots have gained widespread popularity due to their inherent compliance and flexibility, particularly their adjustable levels of stiffness for various application scenarios. Despite efforts to dynamic modeling and control synthesis over the past decade, few studies have focused on incorporating stiffness regulation in their feedback control design; however, this is one of the initial motivations to develop continuum robots. This paper aims to address the crucial challenge of controlling both the position and stiffness of a class of highly underactuated continuum robots that are actuated by antagonistic tendons. To this end, the first step involves presenting a high-dimensional rigid-link dynamical model that can analyze the open-loop stiffening of tendon-driven continuum robots. Based on this model, we propose a novel passivity-based position-and-stiffness controller adheres to the non-negative tension constraint. To demonstrate the effectiveness of our approach, we tested the theoretical results on our continuum robot, and the experimental results show the efficacy and precise performance of the proposed methodology.
Globally convergent visual-feature range estimation with biased inertial measurements
Dec 23, 2021
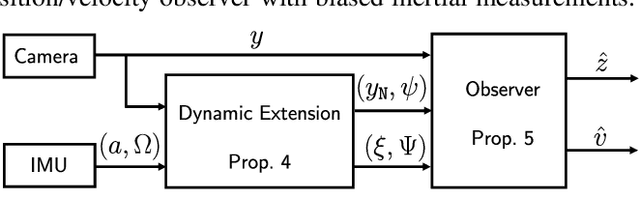

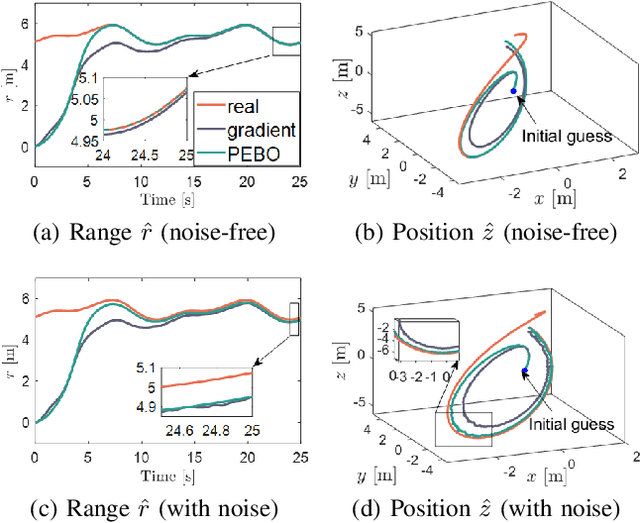
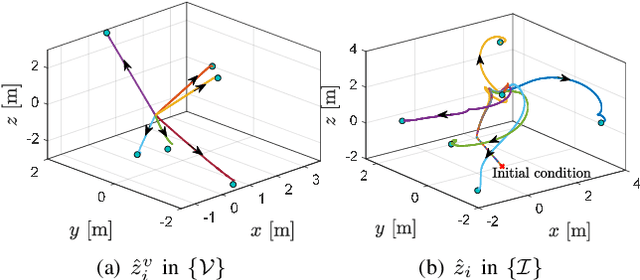
The design of a globally convergent position observer for feature points from visual information is a challenging problem, especially for the case with only inertial measurements and without assumptions of uniform observability, which remained open for a long time. We give a solution to the problem in this paper assuming that only the bearing of a feature point, and biased linear acceleration and rotational velocity of a robot -- all in the body-fixed frame -- are available. Further, in contrast to existing related results, we do not need the value of the gravitational constant either. The proposed approach builds upon the parameter estimation-based observer recently developed in (Ortega et al., Syst. Control. Lett., vol.85, 2015) and its extension to matrix Lie groups in our previous work. Conditions on the robot trajectory under which the observer converges are given, and these are strictly weaker than the standard persistency of excitation and uniform complete observability conditions. Finally, we apply the proposed design to the visual inertial navigation problem. Simulation results are also presented to illustrate our observer design.
Learning Stable Koopman Embeddings
Oct 13, 2021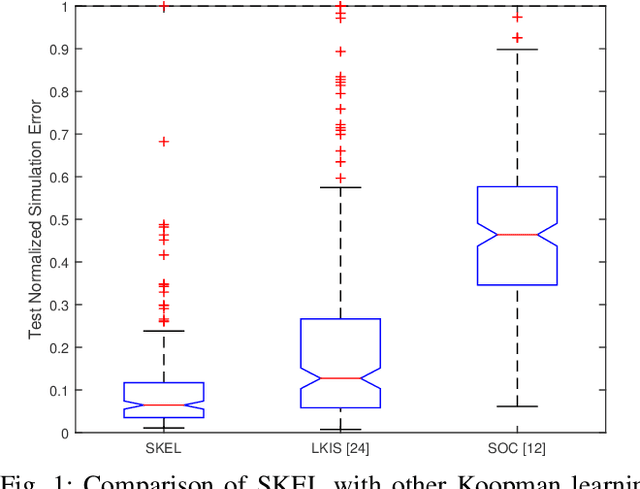
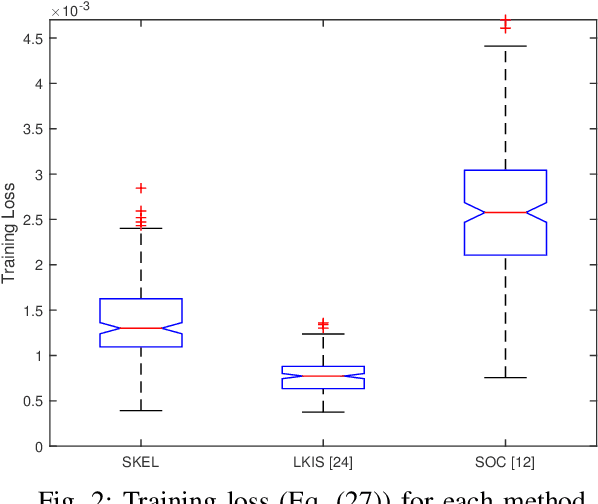
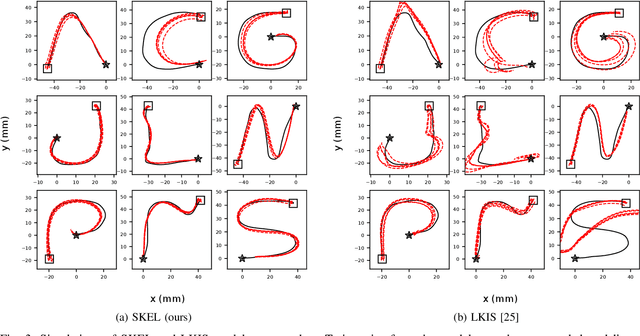
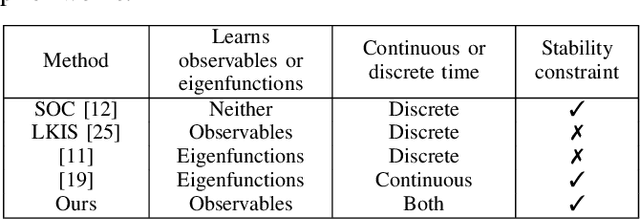
In this paper, we present a new data-driven method for learning stable models of nonlinear systems. Our model lifts the original state space to a higher-dimensional linear manifold using Koopman embeddings. Interestingly, we prove that every discrete-time nonlinear contracting model can be learnt in our framework. Another significant merit of the proposed approach is that it allows for unconstrained optimization over the Koopman embedding and operator jointly while enforcing stability of the model, via a direct parameterization of stable linear systems, greatly simplifying the computations involved. We validate our method on a simulated system and analyze the advantages of our parameterization compared to alternatives.
An almost globally convergent observer for visual SLAM without persistent excitation
Apr 07, 2021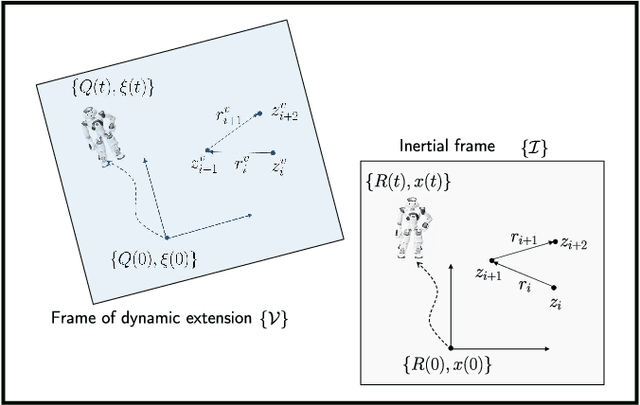
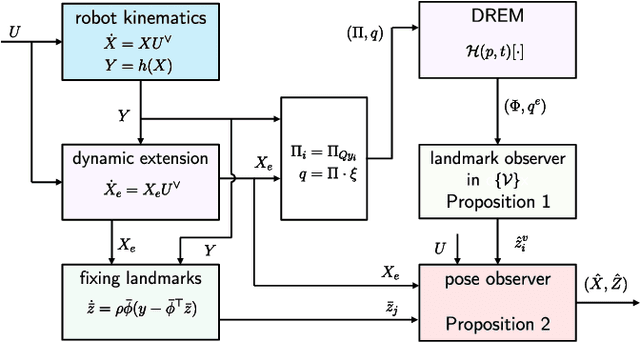
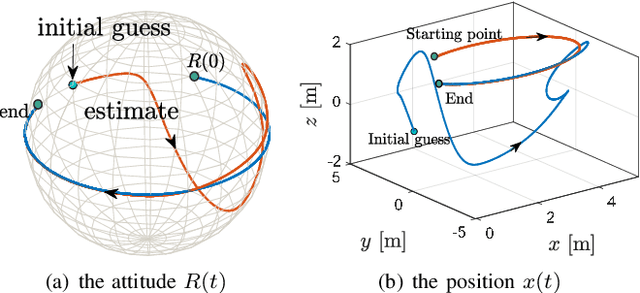
In this paper we propose a novel observer to solve the problem of visual simultaneous localization and mapping, using the information of only the bearing vectors of landmarks observed from a single monocular camera and body-fixed velocities. The system state evolves on the manifold $SE(3)\times \mathbb{R}^{3n}$, on which we design dynamic extensions carefully in order to generate an invariant foliation, such that the problem is reformulated into online parameter identification. Then, following the recently introduced parameter estimation-based observer, we provide a novel and simple solution to address the problem. A notable merit is that the proposed observer guarantees almost global asymptotic stability requiring neither persistent excitation nor uniform complete observability, which, however, are widely adopted in the existing works.