 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn almost globally convergent observer for visual SLAM without persistent excitation
Paper and Code
Apr 07, 2021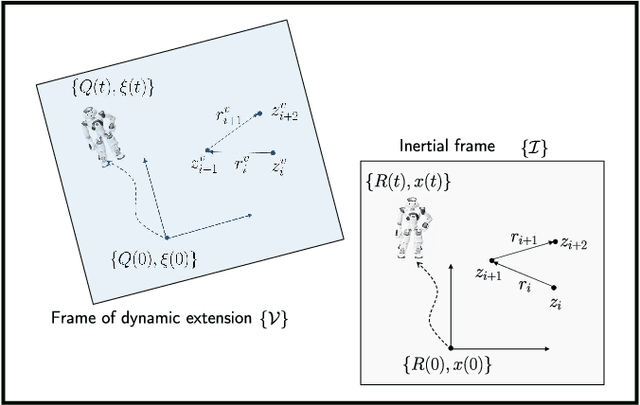
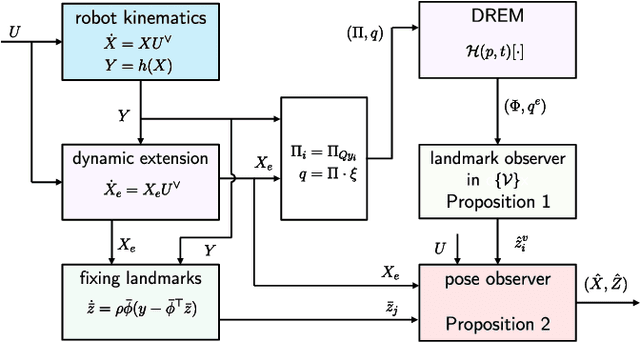
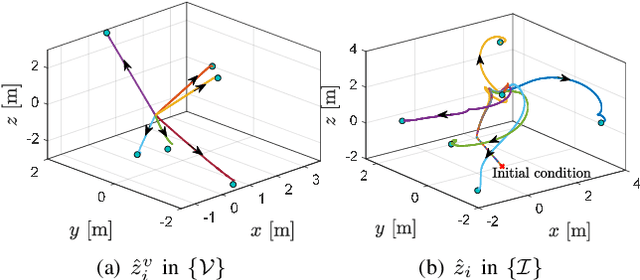
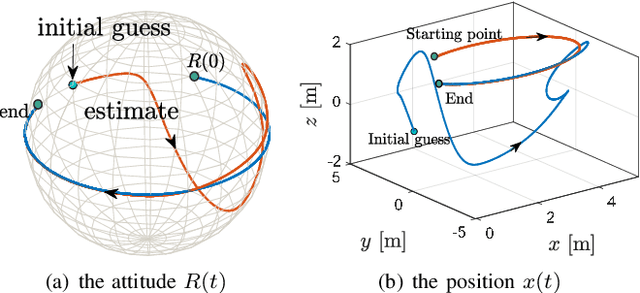
In this paper we propose a novel observer to solve the problem of visual simultaneous localization and mapping, using the information of only the bearing vectors of landmarks observed from a single monocular camera and body-fixed velocities. The system state evolves on the manifold $SE(3)\times \mathbb{R}^{3n}$, on which we design dynamic extensions carefully in order to generate an invariant foliation, such that the problem is reformulated into online parameter identification. Then, following the recently introduced parameter estimation-based observer, we provide a novel and simple solution to address the problem. A notable merit is that the proposed observer guarantees almost global asymptotic stability requiring neither persistent excitation nor uniform complete observability, which, however, are widely adopted in the existing works.