 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Agent Selection and Interaction Network for Image-to-point cloud Registration
Nov 08, 2025Typical detection-free methods for image-to-point cloud registration leverage transformer-based architectures to aggregate cross-modal features and establish correspondences. However, they often struggle under challenging conditions, where noise disrupts similarity computation and leads to incorrect correspondences. Moreover, without dedicated designs, it remains difficult to effectively select informative and correlated representations across modalities, thereby limiting the robustness and accuracy of registration. To address these challenges, we propose a novel cross-modal registration framework composed of two key modules: the Iterative Agents Selection (IAS) module and the Reliable Agents Interaction (RAI) module. IAS enhances structural feature awareness with phase maps and employs reinforcement learning principles to efficiently select reliable agents. RAI then leverages these selected agents to guide cross-modal interactions, effectively reducing mismatches and improving overall robustness. Extensive experiments on the RGB-D Scenes v2 and 7-Scenes benchmarks demonstrate that our method consistently achieves state-of-the-art performance.
CA-I2P: Channel-Adaptive Registration Network with Global Optimal Selection
Jun 26, 2025Detection-free methods typically follow a coarse-to-fine pipeline, extracting image and point cloud features for patch-level matching and refining dense pixel-to-point correspondences. However, differences in feature channel attention between images and point clouds may lead to degraded matching results, ultimately impairing registration accuracy. Furthermore, similar structures in the scene could lead to redundant correspondences in cross-modal matching. To address these issues, we propose Channel Adaptive Adjustment Module (CAA) and Global Optimal Selection Module (GOS). CAA enhances intra-modal features and suppresses cross-modal sensitivity, while GOS replaces local selection with global optimization. Experiments on RGB-D Scenes V2 and 7-Scenes demonstrate the superiority of our method, achieving state-of-the-art performance in image-to-point cloud registration.
EF-3DGS: Event-Aided Free-Trajectory 3D Gaussian Splatting
Oct 20, 2024Scene reconstruction from casually captured videos has wide applications in real-world scenarios. With recent advancements in differentiable rendering techniques, several methods have attempted to simultaneously optimize scene representations (NeRF or 3DGS) and camera poses. Despite recent progress, existing methods relying on traditional camera input tend to fail in high-speed (or equivalently low-frame-rate) scenarios. Event cameras, inspired by biological vision, record pixel-wise intensity changes asynchronously with high temporal resolution, providing valuable scene and motion information in blind inter-frame intervals. In this paper, we introduce the event camera to aid scene construction from a casually captured video for the first time, and propose Event-Aided Free-Trajectory 3DGS, called EF-3DGS, which seamlessly integrates the advantages of event cameras into 3DGS through three key components. First, we leverage the Event Generation Model (EGM) to fuse events and frames, supervising the rendered views observed by the event stream. Second, we adopt the Contrast Maximization (CMax) framework in a piece-wise manner to extract motion information by maximizing the contrast of the Image of Warped Events (IWE), thereby calibrating the estimated poses. Besides, based on the Linear Event Generation Model (LEGM), the brightness information encoded in the IWE is also utilized to constrain the 3DGS in the gradient domain. Third, to mitigate the absence of color information of events, we introduce photometric bundle adjustment (PBA) to ensure view consistency across events and frames.We evaluate our method on the public Tanks and Temples benchmark and a newly collected real-world dataset, RealEv-DAVIS. Our project page is https://lbh666.github.io/ef-3dgs/.
Real-Time 4K Super-Resolution of Compressed AVIF Images. AIS 2024 Challenge Survey
Apr 25, 2024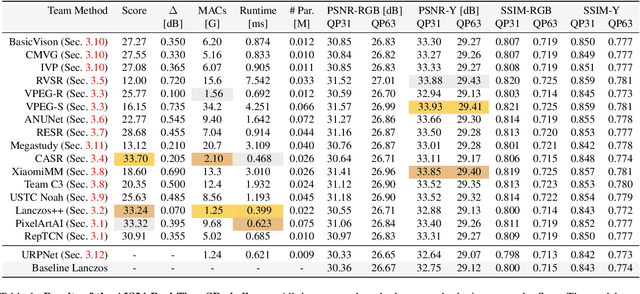
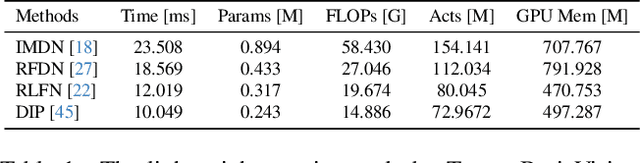
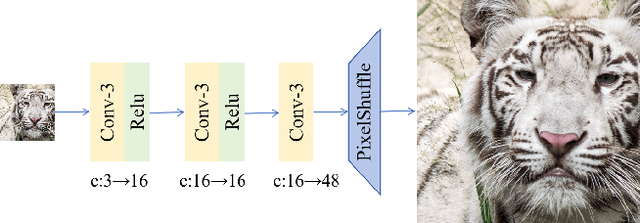
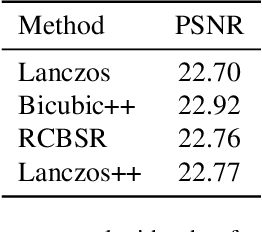
This paper introduces a novel benchmark as part of the AIS 2024 Real-Time Image Super-Resolution (RTSR) Challenge, which aims to upscale compressed images from 540p to 4K resolution (4x factor) in real-time on commercial GPUs. For this, we use a diverse test set containing a variety of 4K images ranging from digital art to gaming and photography. The images are compressed using the modern AVIF codec, instead of JPEG. All the proposed methods improve PSNR fidelity over Lanczos interpolation, and process images under 10ms. Out of the 160 participants, 25 teams submitted their code and models. The solutions present novel designs tailored for memory-efficiency and runtime on edge devices. This survey describes the best solutions for real-time SR of compressed high-resolution images.
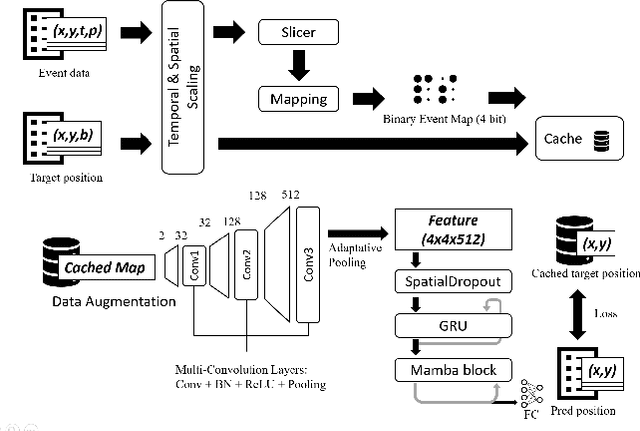
MambaPupil: Bidirectional Selective Recurrent model for Event-based Eye tracking
Apr 18, 2024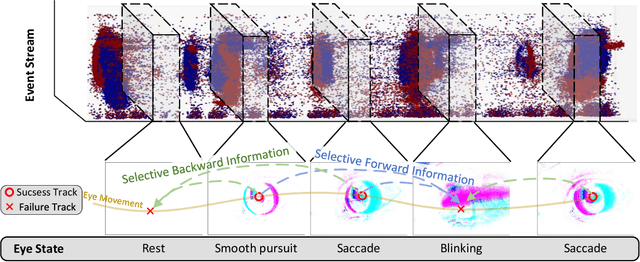
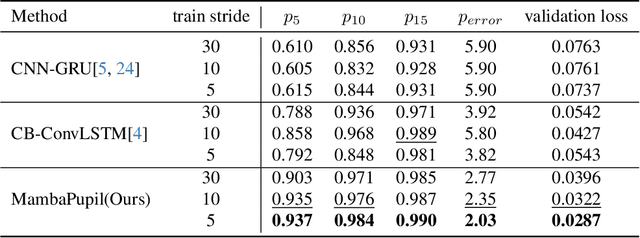
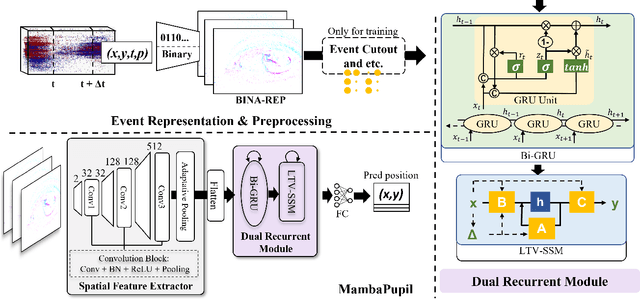

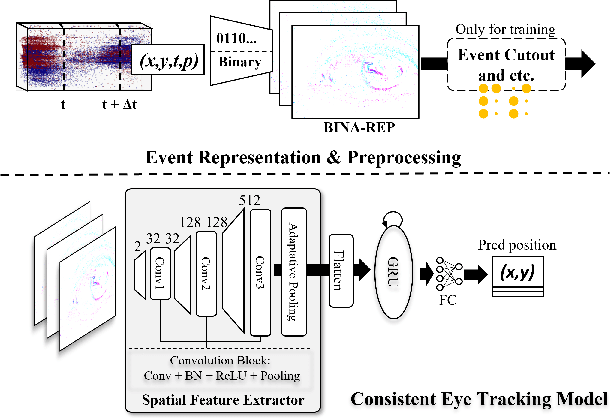
Event-based eye tracking has shown great promise with the high temporal resolution and low redundancy provided by the event camera. However, the diversity and abruptness of eye movement patterns, including blinking, fixating, saccades, and smooth pursuit, pose significant challenges for eye localization. To achieve a stable event-based eye-tracking system, this paper proposes a bidirectional long-term sequence modeling and time-varying state selection mechanism to fully utilize contextual temporal information in response to the variability of eye movements. Specifically, the MambaPupil network is proposed, which consists of the multi-layer convolutional encoder to extract features from the event representations, a bidirectional Gated Recurrent Unit (GRU), and a Linear Time-Varying State Space Module (LTV-SSM), to selectively capture contextual correlation from the forward and backward temporal relationship. Furthermore, the Bina-rep is utilized as a compact event representation, and the tailor-made data augmentation, called as Event-Cutout, is proposed to enhance the model's robustness by applying spatial random masking to the event image. The evaluation on the ThreeET-plus benchmark shows the superior performance of the MambaPupil, which secured the 1st place in CVPR'2024 AIS Event-based Eye Tracking challenge.
Event-Based Eye Tracking. AIS 2024 Challenge Survey
Apr 17, 2024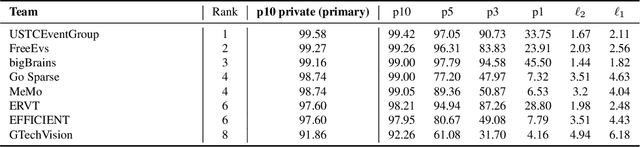
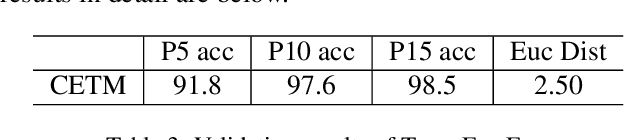
This survey reviews the AIS 2024 Event-Based Eye Tracking (EET) Challenge. The task of the challenge focuses on processing eye movement recorded with event cameras and predicting the pupil center of the eye. The challenge emphasizes efficient eye tracking with event cameras to achieve good task accuracy and efficiency trade-off. During the challenge period, 38 participants registered for the Kaggle competition, and 8 teams submitted a challenge factsheet. The novel and diverse methods from the submitted factsheets are reviewed and analyzed in this survey to advance future event-based eye tracking research.
The Ninth NTIRE 2024 Efficient Super-Resolution Challenge Report
Apr 16, 2024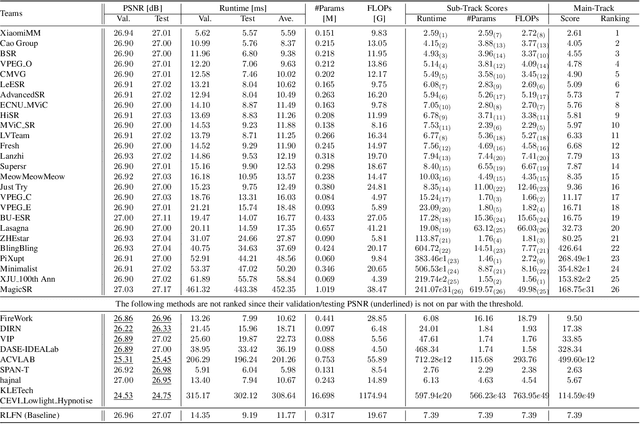
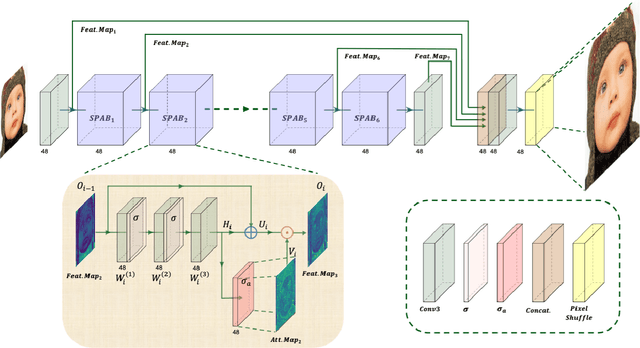
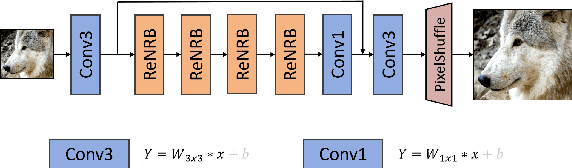
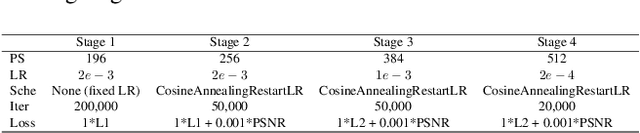
This paper provides a comprehensive review of the NTIRE 2024 challenge, focusing on efficient single-image super-resolution (ESR) solutions and their outcomes. The task of this challenge is to super-resolve an input image with a magnification factor of x4 based on pairs of low and corresponding high-resolution images. The primary objective is to develop networks that optimize various aspects such as runtime, parameters, and FLOPs, while still maintaining a peak signal-to-noise ratio (PSNR) of approximately 26.90 dB on the DIV2K_LSDIR_valid dataset and 26.99 dB on the DIV2K_LSDIR_test dataset. In addition, this challenge has 4 tracks including the main track (overall performance), sub-track 1 (runtime), sub-track 2 (FLOPs), and sub-track 3 (parameters). In the main track, all three metrics (ie runtime, FLOPs, and parameter count) were considered. The ranking of the main track is calculated based on a weighted sum-up of the scores of all other sub-tracks. In sub-track 1, the practical runtime performance of the submissions was evaluated, and the corresponding score was used to determine the ranking. In sub-track 2, the number of FLOPs was considered. The score calculated based on the corresponding FLOPs was used to determine the ranking. In sub-track 3, the number of parameters was considered. The score calculated based on the corresponding parameters was used to determine the ranking. RLFN is set as the baseline for efficiency measurement. The challenge had 262 registered participants, and 34 teams made valid submissions. They gauge the state-of-the-art in efficient single-image super-resolution. To facilitate the reproducibility of the challenge and enable other researchers to build upon these findings, the code and the pre-trained model of validated solutions are made publicly available at https://github.com/Amazingren/NTIRE2024_ESR/.