 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBrevity is the soul of wit: Pruning long files for code generation
Jun 29, 2024


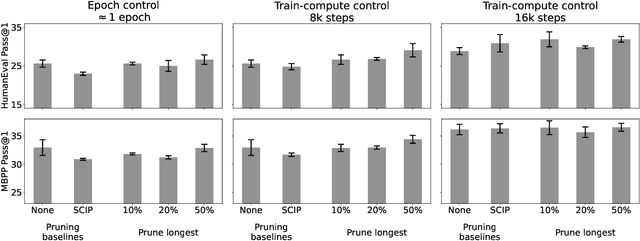
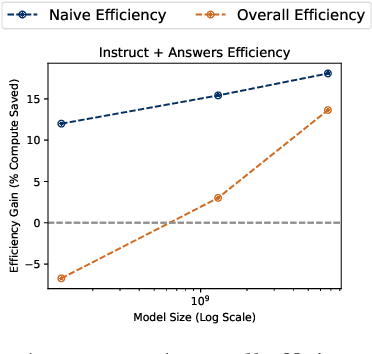
Data curation is commonly considered a "secret-sauce" for LLM training, with higher quality data usually leading to better LLM performance. Given the scale of internet-scraped corpora, data pruning has become a larger and larger focus. Specifically, many have shown that de-duplicating data, or sub-selecting higher quality data, can lead to efficiency or performance improvements. Generally, three types of methods are used to filter internet-scale corpora: embedding-based, heuristic-based, and classifier-based. In this work, we contrast the former two in the domain of finetuning LLMs for code generation. We find that embedding-based methods are often confounded by length, and that a simple heuristic--pruning long files--outperforms other methods in compute-limited regimes. Our method can yield up to a 2x efficiency benefit in training (while matching performance) or a 3.5% absolute performance improvement on HumanEval (while matching compute). However, we find that perplexity on held-out long files can increase, begging the question of whether optimizing data mixtures for common coding benchmarks (HumanEval, MBPP) actually best serves downstream use cases. Overall, we hope our work builds useful intuitions about code data (specifically, the low quality of extremely long code files) provides a compelling heuristic-based method for data pruning, and brings to light questions in how we evaluate code generation models.
Effective pruning of web-scale datasets based on complexity of concept clusters
Jan 09, 2024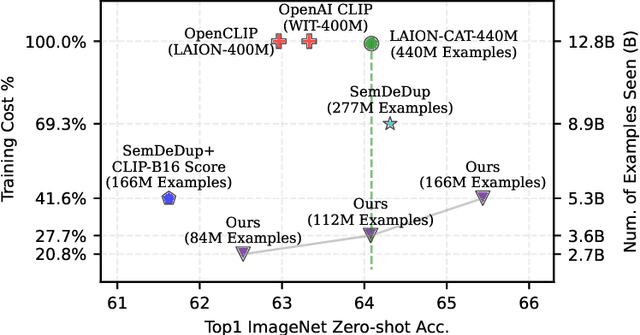
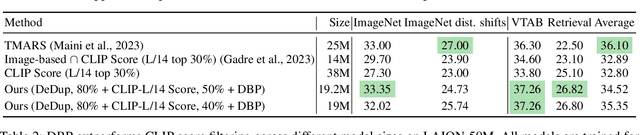
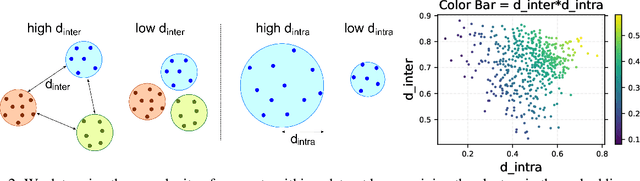
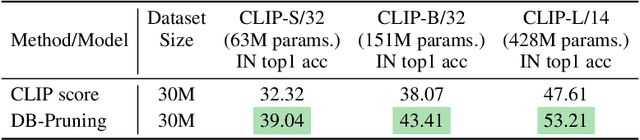
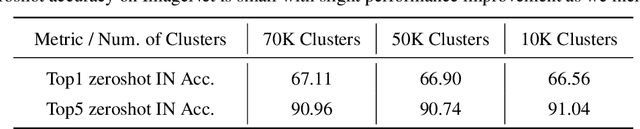
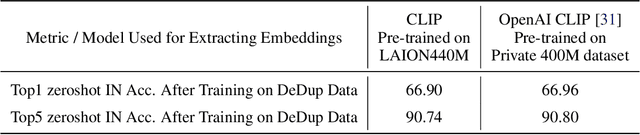
Utilizing massive web-scale datasets has led to unprecedented performance gains in machine learning models, but also imposes outlandish compute requirements for their training. In order to improve training and data efficiency, we here push the limits of pruning large-scale multimodal datasets for training CLIP-style models. Today's most effective pruning method on ImageNet clusters data samples into separate concepts according to their embedding and prunes away the most prototypical samples. We scale this approach to LAION and improve it by noting that the pruning rate should be concept-specific and adapted to the complexity of the concept. Using a simple and intuitive complexity measure, we are able to reduce the training cost to a quarter of regular training. By filtering from the LAION dataset, we find that training on a smaller set of high-quality data can lead to higher performance with significantly lower training costs. More specifically, we are able to outperform the LAION-trained OpenCLIP-ViT-B32 model on ImageNet zero-shot accuracy by 1.1p.p. while only using 27.7% of the data and training compute. Despite a strong reduction in training cost, we also see improvements on ImageNet dist. shifts, retrieval tasks and VTAB. On the DataComp Medium benchmark, we achieve a new state-of-the-art ImageNet zero-shot accuracy and a competitive average zero-shot accuracy on 38 evaluation tasks.
Decoding Data Quality via Synthetic Corruptions: Embedding-guided Pruning of Code Data
Dec 05, 2023Code datasets, often collected from diverse and uncontrolled sources such as GitHub, potentially suffer from quality issues, thereby affecting the performance and training efficiency of Large Language Models (LLMs) optimized for code generation. Previous studies demonstrated the benefit of using embedding spaces for data pruning, but they mainly focused on duplicate removal or increasing variety, and in other modalities, such as images. Our work focuses on using embeddings to identify and remove "low-quality" code data. First, we explore features of "low-quality" code in embedding space, through the use of synthetic corruptions. Armed with this knowledge, we devise novel pruning metrics that operate in embedding space to identify and remove low-quality entries in the Stack dataset. We demonstrate the benefits of this synthetic corruption informed pruning (SCIP) approach on the well-established HumanEval and MBPP benchmarks, outperforming existing embedding-based methods. Importantly, we achieve up to a 3% performance improvement over no pruning, thereby showing the promise of insights from synthetic corruptions for data pruning.
D4: Improving LLM Pretraining via Document De-Duplication and Diversification
Aug 23, 2023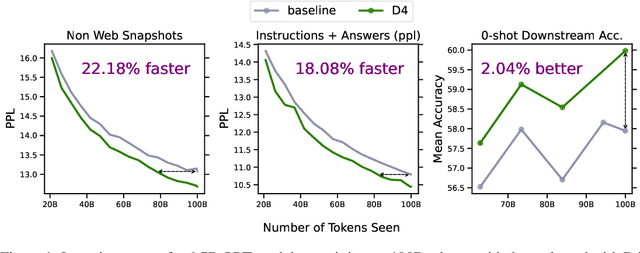
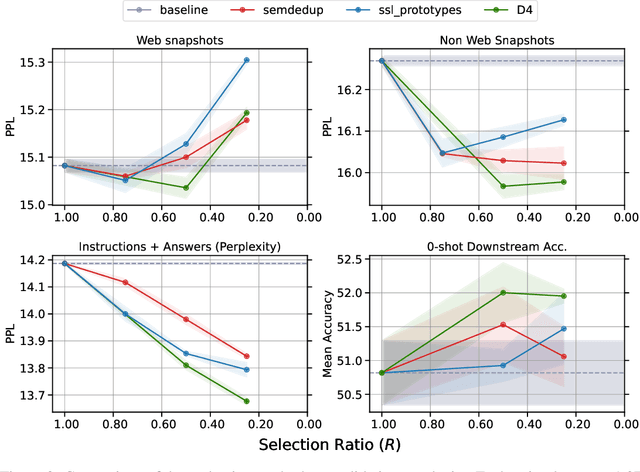
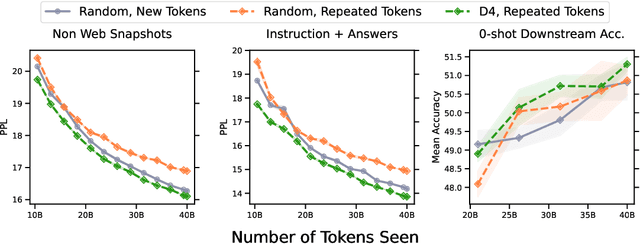
Over recent years, an increasing amount of compute and data has been poured into training large language models (LLMs), usually by doing one-pass learning on as many tokens as possible randomly selected from large-scale web corpora. While training on ever-larger portions of the internet leads to consistent performance improvements, the size of these improvements diminishes with scale, and there has been little work exploring the effect of data selection on pre-training and downstream performance beyond simple de-duplication methods such as MinHash. Here, we show that careful data selection (on top of de-duplicated data) via pre-trained model embeddings can speed up training (20% efficiency gains) and improves average downstream accuracy on 16 NLP tasks (up to 2%) at the 6.7B model scale. Furthermore, we show that repeating data intelligently consistently outperforms baseline training (while repeating random data performs worse than baseline training). Our results indicate that clever data selection can significantly improve LLM pre-training, calls into question the common practice of training for a single epoch on as much data as possible, and demonstrates a path to keep improving our models past the limits of randomly sampling web data.
PUG: Photorealistic and Semantically Controllable Synthetic Data for Representation Learning
Aug 08, 2023



Synthetic image datasets offer unmatched advantages for designing and evaluating deep neural networks: they make it possible to (i) render as many data samples as needed, (ii) precisely control each scene and yield granular ground truth labels (and captions), (iii) precisely control distribution shifts between training and testing to isolate variables of interest for sound experimentation. Despite such promise, the use of synthetic image data is still limited -- and often played down -- mainly due to their lack of realism. Most works therefore rely on datasets of real images, which have often been scraped from public images on the internet, and may have issues with regards to privacy, bias, and copyright, while offering little control over how objects precisely appear. In this work, we present a path to democratize the use of photorealistic synthetic data: we develop a new generation of interactive environments for representation learning research, that offer both controllability and realism. We use the Unreal Engine, a powerful game engine well known in the entertainment industry, to produce PUG (Photorealistic Unreal Graphics) environments and datasets for representation learning. In this paper, we demonstrate the potential of PUG to enable more rigorous evaluations of vision models.
SemDeDup: Data-efficient learning at web-scale through semantic deduplication
Mar 22, 2023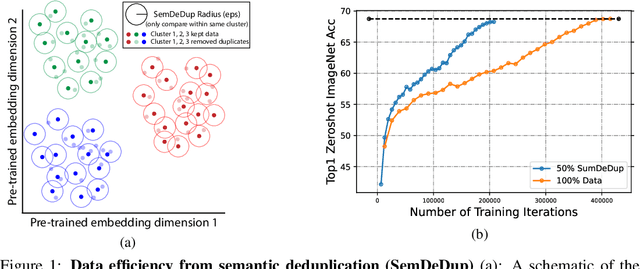
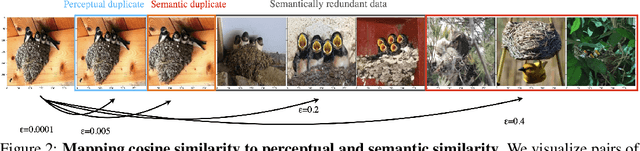
Progress in machine learning has been driven in large part by massive increases in data. However, large web-scale datasets such as LAION are largely uncurated beyond searches for exact duplicates, potentially leaving much redundancy. Here, we introduce SemDeDup, a method which leverages embeddings from pre-trained models to identify and remove semantic duplicates: data pairs which are semantically similar, but not exactly identical. Removing semantic duplicates preserves performance and speeds up learning. Analyzing a subset of LAION, we show that SemDeDup can remove 50% of the data with minimal performance loss, effectively halving training time. Moreover, performance increases out of distribution. Also, analyzing language models trained on C4, a partially curated dataset, we show that SemDeDup improves over prior approaches while providing efficiency gains. SemDeDup provides an example of how simple ways of leveraging quality embeddings can be used to make models learn faster with less data.
Emergence of Maps in the Memories of Blind Navigation Agents
Jan 30, 2023Animal navigation research posits that organisms build and maintain internal spatial representations, or maps, of their environment. We ask if machines -- specifically, artificial intelligence (AI) navigation agents -- also build implicit (or 'mental') maps. A positive answer to this question would (a) explain the surprising phenomenon in recent literature of ostensibly map-free neural-networks achieving strong performance, and (b) strengthen the evidence of mapping as a fundamental mechanism for navigation by intelligent embodied agents, whether they be biological or artificial. Unlike animal navigation, we can judiciously design the agent's perceptual system and control the learning paradigm to nullify alternative navigation mechanisms. Specifically, we train 'blind' agents -- with sensing limited to only egomotion and no other sensing of any kind -- to perform PointGoal navigation ('go to $\Delta$ x, $\Delta$ y') via reinforcement learning. Our agents are composed of navigation-agnostic components (fully-connected and recurrent neural networks), and our experimental setup provides no inductive bias towards mapping. Despite these harsh conditions, we find that blind agents are (1) surprisingly effective navigators in new environments (~95% success); (2) they utilize memory over long horizons (remembering ~1,000 steps of past experience in an episode); (3) this memory enables them to exhibit intelligent behavior (following walls, detecting collisions, taking shortcuts); (4) there is emergence of maps and collision detection neurons in the representations of the environment built by a blind agent as it navigates; and (5) the emergent maps are selective and task dependent (e.g. the agent 'forgets' exploratory detours). Overall, this paper presents no new techniques for the AI audience, but a surprising finding, an insight, and an explanation.
Beyond neural scaling laws: beating power law scaling via data pruning
Jun 29, 2022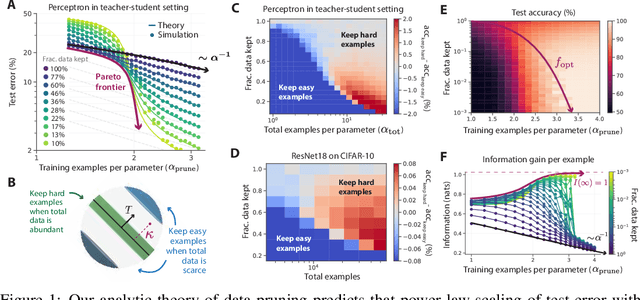

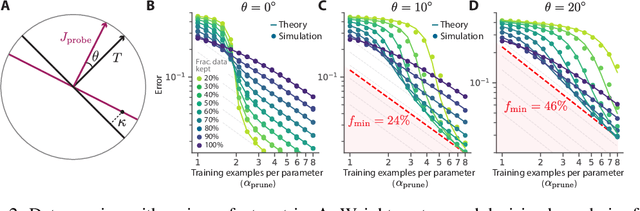

Widely observed neural scaling laws, in which error falls off as a power of the training set size, model size, or both, have driven substantial performance improvements in deep learning. However, these improvements through scaling alone require considerable costs in compute and energy. Here we focus on the scaling of error with dataset size and show how both in theory and practice we can break beyond power law scaling and reduce it to exponential scaling instead if we have access to a high-quality data pruning metric that ranks the order in which training examples should be discarded to achieve any pruned dataset size. We then test this new exponential scaling prediction with pruned dataset size empirically, and indeed observe better than power law scaling performance on ResNets trained on CIFAR-10, SVHN, and ImageNet. Given the importance of finding high-quality pruning metrics, we perform the first large-scale benchmarking study of ten different data pruning metrics on ImageNet. We find most existing high performing metrics scale poorly to ImageNet, while the best are computationally intensive and require labels for every image. We therefore developed a new simple, cheap and scalable self-supervised pruning metric that demonstrates comparable performance to the best supervised metrics. Overall, our work suggests that the discovery of good data-pruning metrics may provide a viable path forward to substantially improved neural scaling laws, thereby reducing the resource costs of modern deep learning.
Model soups: averaging weights of multiple fine-tuned models improves accuracy without increasing inference time
Mar 10, 2022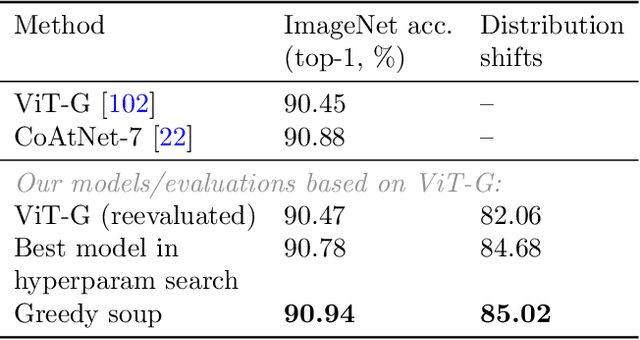
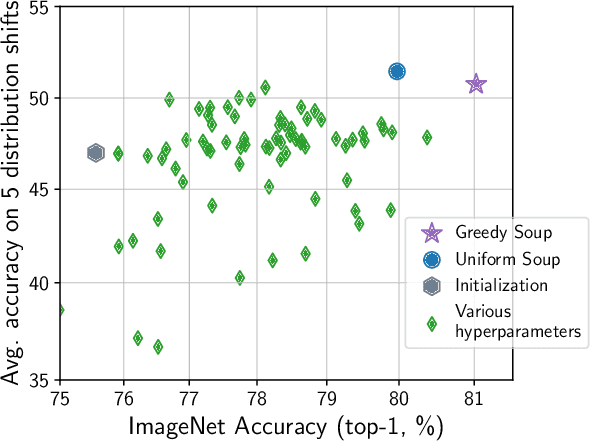

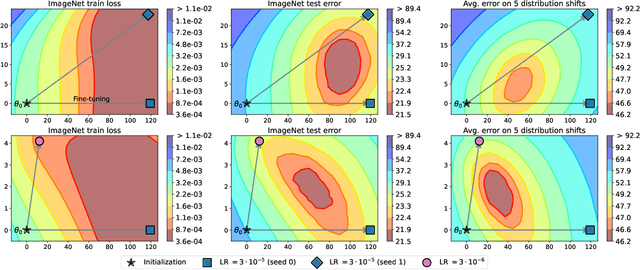
The conventional recipe for maximizing model accuracy is to (1) train multiple models with various hyperparameters and (2) pick the individual model which performs best on a held-out validation set, discarding the remainder. In this paper, we revisit the second step of this procedure in the context of fine-tuning large pre-trained models, where fine-tuned models often appear to lie in a single low error basin. We show that averaging the weights of multiple models fine-tuned with different hyperparameter configurations often improves accuracy and robustness. Unlike a conventional ensemble, we may average many models without incurring any additional inference or memory costs -- we call the results "model soups." When fine-tuning large pre-trained models such as CLIP, ALIGN, and a ViT-G pre-trained on JFT, our soup recipe provides significant improvements over the best model in a hyperparameter sweep on ImageNet. As a highlight, the resulting ViT-G model attains 90.94% top-1 accuracy on ImageNet, a new state of the art. Furthermore, we show that the model soup approach extends to multiple image classification and natural language processing tasks, improves out-of-distribution performance, and improves zero-shot performance on new downstream tasks. Finally, we analytically relate the performance similarity of weight-averaging and logit-ensembling to flatness of the loss and confidence of the predictions, and validate this relation empirically.
Grounding inductive biases in natural images:invariance stems from variations in data
Jun 09, 2021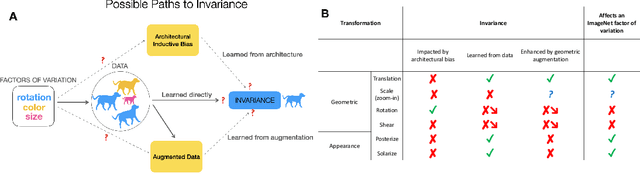
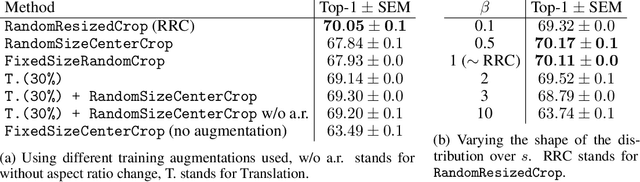
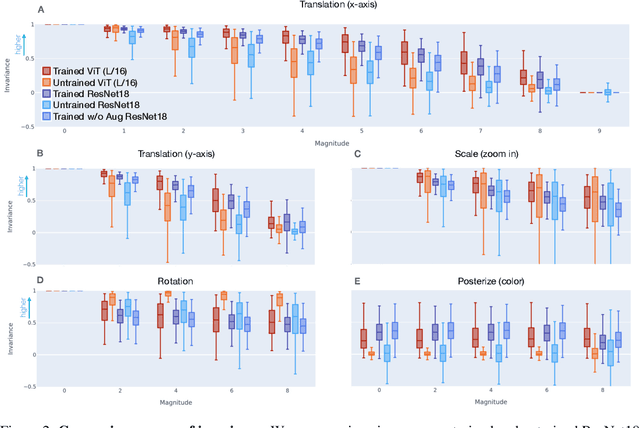
To perform well on unseen and potentially out-of-distribution samples, it is desirable for machine learning models to have a predictable response with respect to transformations affecting the factors of variation of the input. Invariance is commonly achieved through hand-engineered data augmentation, but do standard data augmentations address transformations that explain variations in real data? While prior work has focused on synthetic data, we attempt here to characterize the factors of variation in a real dataset, ImageNet, and study the invariance of both standard residual networks and the recently proposed vision transformer with respect to changes in these factors. We show standard augmentation relies on a precise combination of translation and scale, with translation recapturing most of the performance improvement -- despite the (approximate) translation invariance built in to convolutional architectures, such as residual networks. In fact, we found that scale and translation invariance was similar across residual networks and vision transformer models despite their markedly different inductive biases. We show the training data itself is the main source of invariance, and that data augmentation only further increases the learned invariances. Interestingly, the invariances brought from the training process align with the ImageNet factors of variation we found. Finally, we find that the main factors of variation in ImageNet mostly relate to appearance and are specific to each class.