 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Prospects of Incorporating Large Language Models (LLMs) in Automated Planning and Scheduling (APS)
Jan 04, 2024



Automated Planning and Scheduling is among the growing areas in Artificial Intelligence (AI) where mention of LLMs has gained popularity. Based on a comprehensive review of 126 papers, this paper investigates eight categories based on the unique applications of LLMs in addressing various aspects of planning problems: language translation, plan generation, model construction, multi-agent planning, interactive planning, heuristics optimization, tool integration, and brain-inspired planning. For each category, we articulate the issues considered and existing gaps. A critical insight resulting from our review is that the true potential of LLMs unfolds when they are integrated with traditional symbolic planners, pointing towards a promising neuro-symbolic approach. This approach effectively combines the generative aspects of LLMs with the precision of classical planning methods. By synthesizing insights from existing literature, we underline the potential of this integration to address complex planning challenges. Our goal is to encourage the ICAPS community to recognize the complementary strengths of LLMs and symbolic planners, advocating for a direction in automated planning that leverages these synergistic capabilities to develop more advanced and intelligent planning systems.
Legal Summarisation through LLMs: The PRODIGIT Project
Aug 04, 2023


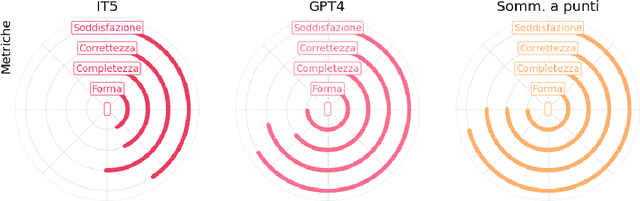
We present some initial results of a large-scale Italian project called PRODIGIT which aims to support tax judges and lawyers through digital technology, focusing on AI. We have focused on generation of summaries of judicial decisions and on the extraction of related information, such as the identification of legal issues and decision-making criteria, and the specification of keywords. To this end, we have deployed and evaluated different tools and approaches to extractive and abstractive summarisation. We have applied LLMs, and particularly on GPT4, which has enabled us to obtain results that proved satisfactory, according to an evaluation by expert tax judges and lawyers. On this basis, a prototype application is being built which will be made publicly available.
Value-based Fast and Slow AI Nudging
Jul 14, 2023



Nudging is a behavioral strategy aimed at influencing people's thoughts and actions. Nudging techniques can be found in many situations in our daily lives, and these nudging techniques can targeted at human fast and unconscious thinking, e.g., by using images to generate fear or the more careful and effortful slow thinking, e.g., by releasing information that makes us reflect on our choices. In this paper, we propose and discuss a value-based AI-human collaborative framework where AI systems nudge humans by proposing decision recommendations. Three different nudging modalities, based on when recommendations are presented to the human, are intended to stimulate human fast thinking, slow thinking, or meta-cognition. Values that are relevant to a specific decision scenario are used to decide when and how to use each of these nudging modalities. Examples of values are decision quality, speed, human upskilling and learning, human agency, and privacy. Several values can be present at the same time, and their priorities can vary over time. The framework treats values as parameters to be instantiated in a specific decision environment.
Understanding the Capabilities of Large Language Models for Automated Planning
May 25, 2023



Automated planning is concerned with developing efficient algorithms to generate plans or sequences of actions to achieve a specific goal in a given environment. Emerging Large Language Models (LLMs) can answer questions, write high-quality programming code, and predict protein folding, showcasing their versatility in solving various tasks beyond language-based problems. In this paper, we aim to explore how LLMs can also be used for automated planning. To do so, we seek to answer four key questions. Firstly, we want to understand the extent to which LLMs can be used for plan generation. Secondly, we aim to identify which pre-training data is most effective in facilitating plan generation. Thirdly, we investigate whether fine-tuning or prompting is a more effective approach for plan generation. Finally, we explore whether LLMs are capable of plan generalization. By answering these questions, the study seeks to shed light on the capabilities of LLMs in solving complex planning problems and provide insights into the most effective approaches for using LLMs in this context.
Fast and Slow Planning
Mar 07, 2023The concept of Artificial Intelligence has gained a lot of attention over the last decade. In particular, AI-based tools have been employed in several scenarios and are, by now, pervading our everyday life. Nonetheless, most of these systems lack many capabilities that we would naturally consider to be included in a notion of "intelligence". In this work, we present an architecture that, inspired by the cognitive theory known as Thinking Fast and Slow by D. Kahneman, is tasked with solving planning problems in different settings, specifically: classical and multi-agent epistemic. The system proposed is an instance of a more general AI paradigm, referred to as SOFAI (for Slow and Fast AI). SOFAI exploits multiple solving approaches, with different capabilities that characterize them as either fast or slow, and a metacognitive module to regulate them. This combination of components, which roughly reflects the human reasoning process according to D. Kahneman, allowed us to enhance the reasoning process that, in this case, is concerned with planning in two different settings. The behavior of this system is then compared to state-of-the-art solvers, showing that the newly introduced system presents better results in terms of generality, solving a wider set of problems with an acceptable trade-off between solving times and solution accuracy.
Plansformer: Generating Symbolic Plans using Transformers
Dec 16, 2022Large Language Models (LLMs) have been the subject of active research, significantly advancing the field of Natural Language Processing (NLP). From BERT to BLOOM, LLMs have surpassed state-of-the-art results in various natural language tasks such as question answering, summarization, and text generation. Many ongoing efforts focus on understanding LLMs' capabilities, including their knowledge of the world, syntax, and semantics. However, extending the textual prowess of LLMs to symbolic reasoning has been slow and predominantly focused on tackling problems related to the mathematical field. In this paper, we explore the use of LLMs for automated planning - a branch of AI concerned with the realization of action sequences (plans) to achieve a goal, typically executed by intelligent agents, autonomous robots, and unmanned vehicles. We introduce Plansformer; an LLM fine-tuned on planning problems and capable of generating plans with favorable behavior in terms of correctness and length with reduced knowledge-engineering efforts. We also demonstrate the adaptability of Plansformer in solving different planning domains with varying complexities, owing to the transfer learning abilities of LLMs. For one configuration of Plansformer, we achieve ~97% valid plans, out of which ~95% are optimal for Towers of Hanoi - a puzzle-solving domain.
Learning Behavioral Soft Constraints from Demonstrations
Feb 21, 2022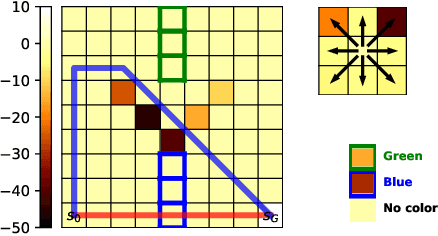
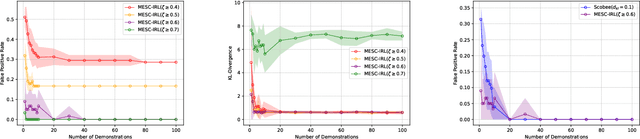
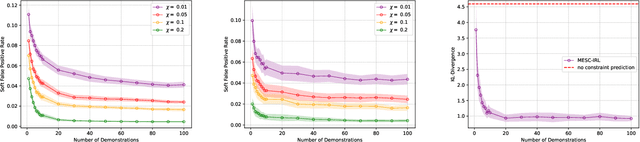

Many real-life scenarios require humans to make difficult trade-offs: do we always follow all the traffic rules or do we violate the speed limit in an emergency? These scenarios force us to evaluate the trade-off between collective rules and norms with our own personal objectives and desires. To create effective AI-human teams, we must equip AI agents with a model of how humans make these trade-offs in complex environments when there are implicit and explicit rules and constraints. Agent equipped with these models will be able to mirror human behavior and/or to draw human attention to situations where decision making could be improved. To this end, we propose a novel inverse reinforcement learning (IRL) method: Max Entropy Inverse Soft Constraint IRL (MESC-IRL), for learning implicit hard and soft constraints over states, actions, and state features from demonstrations in deterministic and non-deterministic environments modeled as Markov Decision Processes (MDPs). Our method enables agents implicitly learn human constraints and desires without the need for explicit modeling by the agent designer and to transfer these constraints between environments. Our novel method generalizes prior work which only considered deterministic hard constraints and achieves state of the art performance.
When Is It Acceptable to Break the Rules? Knowledge Representation of Moral Judgement Based on Empirical Data
Jan 19, 2022One of the most remarkable things about the human moral mind is its flexibility. We can make moral judgments about cases we have never seen before. We can decide that pre-established rules should be broken. We can invent novel rules on the fly. Capturing this flexibility is one of the central challenges in developing AI systems that can interpret and produce human-like moral judgment. This paper details the results of a study of real-world decision makers who judge whether it is acceptable to break a well-established norm: ``no cutting in line.'' We gather data on how human participants judge the acceptability of line-cutting in a range of scenarios. Then, in order to effectively embed these reasoning capabilities into a machine, we propose a method for modeling them using a preference-based structure, which captures a novel modification to standard ``dual process'' theories of moral judgment.
Combining Fast and Slow Thinking for Human-like and Efficient Navigation in Constrained Environments
Jan 18, 2022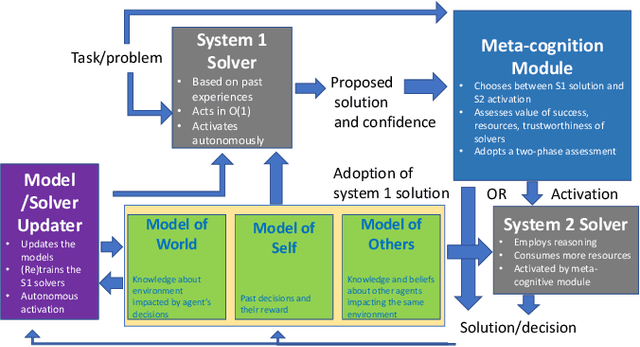
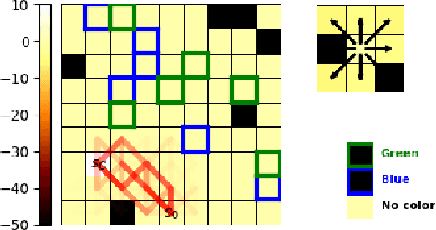
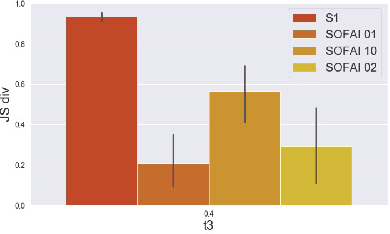

Current AI systems lack several important human capabilities, such as adaptability, generalizability, self-control, consistency, common sense, and causal reasoning. We believe that existing cognitive theories of human decision making, such as the thinking fast and slow theory, can provide insights on how to advance AI systems towards some of these capabilities. In this paper, we propose a general architecture that is based on fast/slow solvers and a metacognitive component. We then present experimental results on the behavior of an instance of this architecture, for AI systems that make decisions about navigating in a constrained environment. We show how combining the fast and slow decision modalities allows the system to evolve over time and gradually pass from slow to fast thinking with enough experience, and that this greatly helps in decision quality, resource consumption, and efficiency.
Deep ensembles in bioimage segmentation
Dec 24, 2021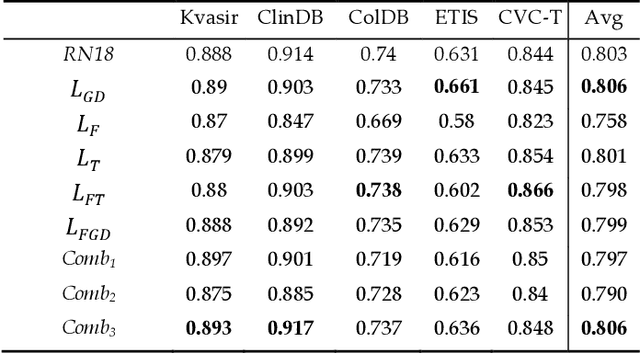
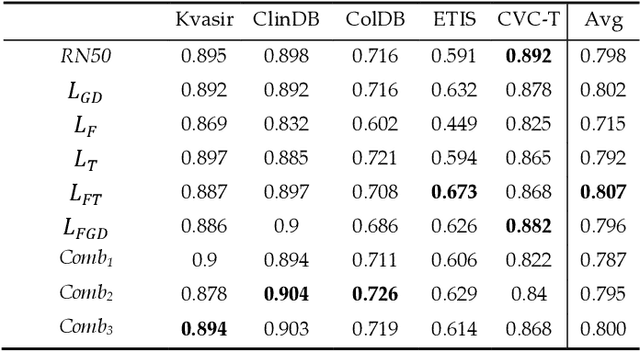
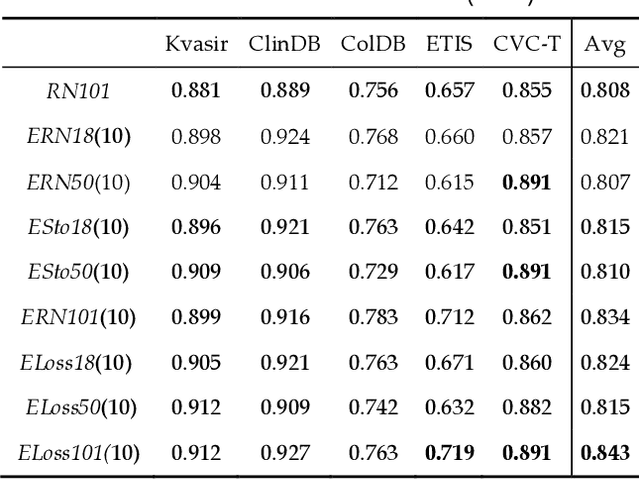
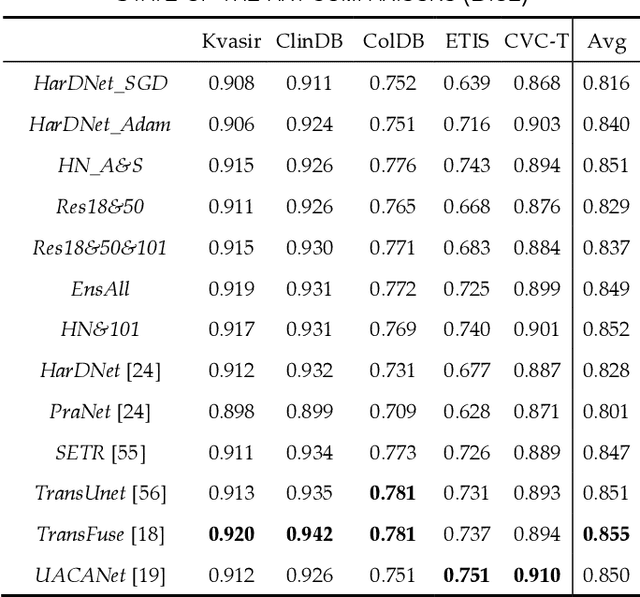
Semantic segmentation consists in classifying each pixel of an image by assigning it to a specific label chosen from a set of all the available ones. During the last few years, a lot of attention shifted to this kind of task. Many computer vision researchers tried to apply autoencoder structures to develop models that can learn the semantics of the image as well as a low-level representation of it. In an autoencoder architecture, given an input, an encoder computes a low dimensional representation of the input that is then used by a decoder to reconstruct the original data. In this work, we propose an ensemble of convolutional neural networks (CNNs). In ensemble methods, many different models are trained and then used for classification, the ensemble aggregates the outputs of the single classifiers. The approach leverages on differences of various classifiers to improve the performance of the whole system. Diversity among the single classifiers is enforced by using different loss functions. In particular, we present a new loss function that results from the combination of Dice and Structural Similarity Index. The proposed ensemble is implemented by combining different backbone networks using the DeepLabV3+ and HarDNet environment. The proposal is evaluated through an extensive empirical evaluation on two real-world scenarios: polyp and skin segmentation. All the code is available online at https://github.com/LorisNanni.