 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCognitive Fatigue in Autoregressive Transformers: Formalization and Measurement
May 29, 2026Autoregressive language models frequently degrade during long-horizon generation, producing repetitive text, losing instruction adherence, and exhibiting unstable entropy. Despite the prevalence of these failures, practitioners lack online diagnostics to detect them in real-time as they occur. We formalize this degradation as cognitive fatigue, a measurable generation-time state characterized by decay in attention to the original prompt, representational drift, and entropy miscalibration. We introduce the Fatigue Index (FI), a lightweight, model-agnostic diagnostic that aggregates these three signals under explicit axioms (monotonicity, boundedness, interpretability) enabling reliable runtime monitoring. Across nine models (1B-13B parameters), FI trajectories exhibit structured temporal dynamics, predict task degradation (AUROC = 0.95) and repetition (Spearman rho = 0.94), and reveal non-monotonic scaling behavior: instruction-tuned models below 3B exhibit faster collapse than base models, with this trend reversing at 7B. Stress analyses further show that FI onset accelerates under longer contexts, middle-positioned evidence, and reduced numerical precision. These results establish cognitive fatigue as a coherent and measurable phenomenon, and position FI as a principled tool for runtime reliability monitoring in production LLM systems.
On Sample-Efficient Generalized Planning via Learned Transition Models
Feb 26, 2026Generalized planning studies the construction of solution strategies that generalize across families of planning problems sharing a common domain model, formally defined by a transition function $γ: S \times A \rightarrow S$. Classical approaches achieve such generalization through symbolic abstractions and explicit reasoning over $γ$. In contrast, recent Transformer-based planners, such as PlanGPT and Plansformer, largely cast generalized planning as direct action-sequence prediction, bypassing explicit transition modeling. While effective on in-distribution instances, these approaches typically require large datasets and model sizes, and often suffer from state drift in long-horizon settings due to the absence of explicit world-state evolution. In this work, we formulate generalized planning as a transition-model learning problem, in which a neural model explicitly approximates the successor-state function $\hatγ \approx γ$ and generates plans by rolling out symbolic state trajectories. Instead of predicting actions directly, the model autoregressively predicts intermediate world states, thereby learning the domain dynamics as an implicit world model. To study size-invariant generalization and sample efficiency, we systematically evaluate multiple state representations and neural architectures, including relational graph encodings. Our results show that learning explicit transition models yields higher out-of-distribution satisficing-plan success than direct action-sequence prediction in multiple domains, while achieving these gains with significantly fewer training instances and smaller models. This is an extended version of a short paper accepted at ICAPS 2026 under the same title.
FABLE: A Novel Data-Flow Analysis Benchmark on Procedural Text for Large Language Model Evaluation
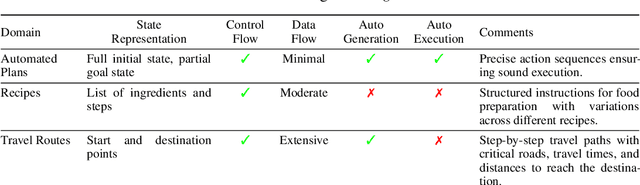
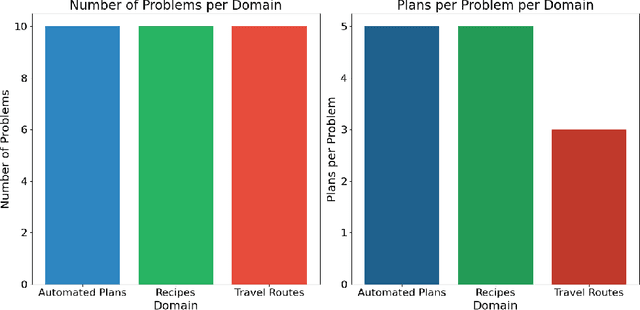
May 30, 2025Understanding how data moves, transforms, and persists, known as data flow, is fundamental to reasoning in procedural tasks. Despite their fluency in natural and programming languages, large language models (LLMs), although increasingly being applied to decisions with procedural tasks, have not been systematically evaluated for their ability to perform data-flow reasoning. We introduce FABLE, an extensible benchmark designed to assess LLMs' understanding of data flow using structured, procedural text. FABLE adapts eight classical data-flow analyses from software engineering: reaching definitions, very busy expressions, available expressions, live variable analysis, interval analysis, type-state analysis, taint analysis, and concurrency analysis. These analyses are instantiated across three real-world domains: cooking recipes, travel routes, and automated plans. The benchmark includes 2,400 question-answer pairs, with 100 examples for each domain-analysis combination. We evaluate three types of LLMs: a reasoning-focused model (DeepSeek-R1 8B), a general-purpose model (LLaMA 3.1 8B), and a code-specific model (Granite Code 8B). Each model is tested using majority voting over five sampled completions per prompt. Results show that the reasoning model achieves higher accuracy, but at the cost of over 20 times slower inference compared to the other models. In contrast, the general-purpose and code-specific models perform close to random chance. FABLE provides the first diagnostic benchmark to systematically evaluate data-flow reasoning and offers insights for developing models with stronger procedural understanding.
A Neurosymbolic Fast and Slow Architecture for Graph Coloring
Dec 02, 2024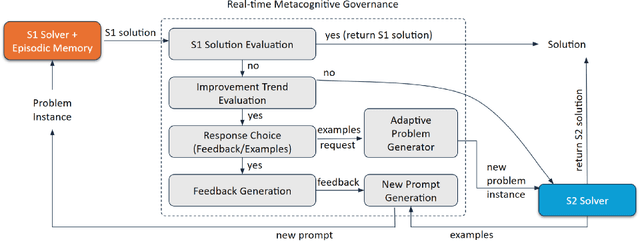
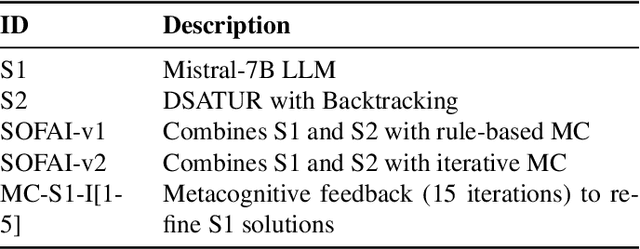
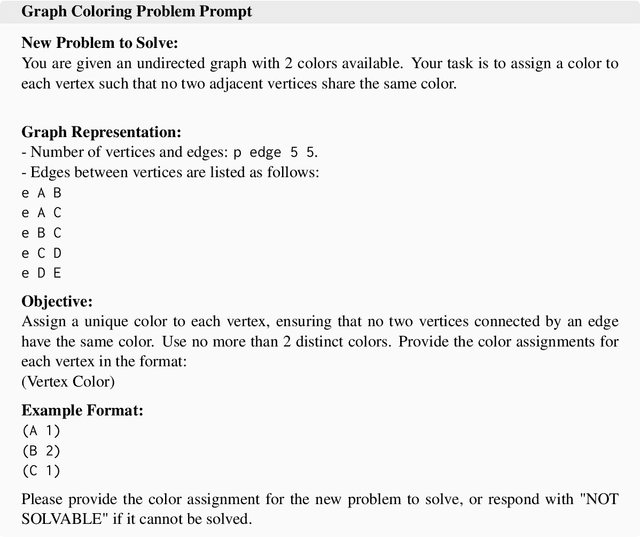
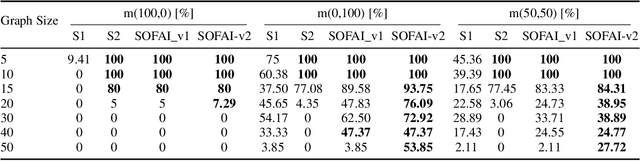
Constraint Satisfaction Problems (CSPs) present significant challenges to artificial intelligence due to their intricate constraints and the necessity for precise solutions. Existing symbolic solvers are often slow, and prior research has shown that Large Language Models (LLMs) alone struggle with CSPs because of their complexity. To bridge this gap, we build upon the existing SOFAI architecture (or SOFAI-v1), which adapts Daniel Kahneman's ''Thinking, Fast and Slow'' cognitive model to AI. Our enhanced architecture, SOFAI-v2, integrates refined metacognitive governance mechanisms to improve adaptability across complex domains, specifically tailored for solving CSPs like graph coloring. SOFAI-v2 combines a fast System 1 (S1) based on LLMs with a deliberative System 2 (S2) governed by a metacognition module. S1's initial solutions, often limited by non-adherence to constraints, are enhanced through metacognitive governance, which provides targeted feedback and examples to adapt S1 to CSP requirements. If S1 fails to solve the problem, metacognition strategically invokes S2, ensuring accurate and reliable solutions. With empirical results, we show that SOFAI-v2 for graph coloring problems achieves a 16.98% increased success rate and is 32.42% faster than symbolic solvers.
Neurosymbolic AI for Enhancing Instructability in Generative AI
Jul 26, 2024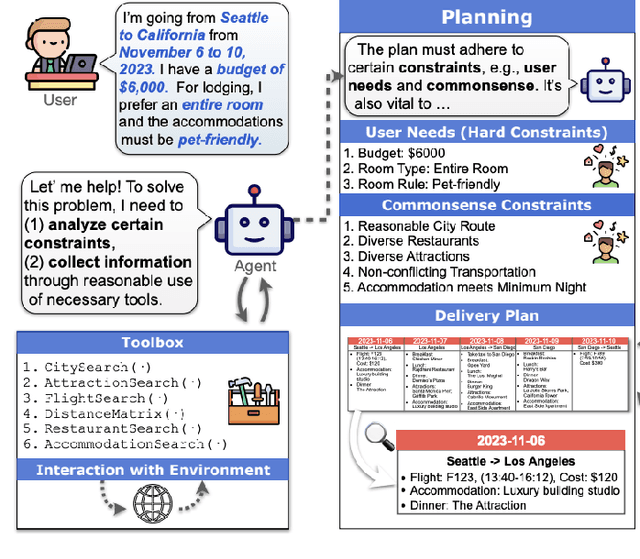
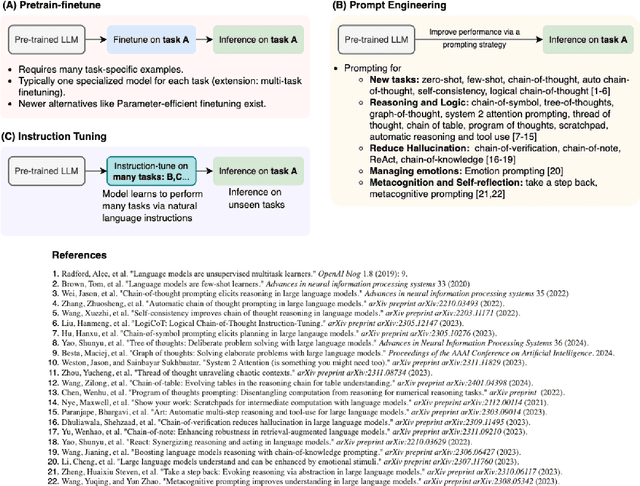
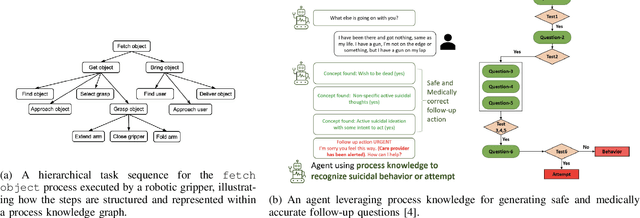
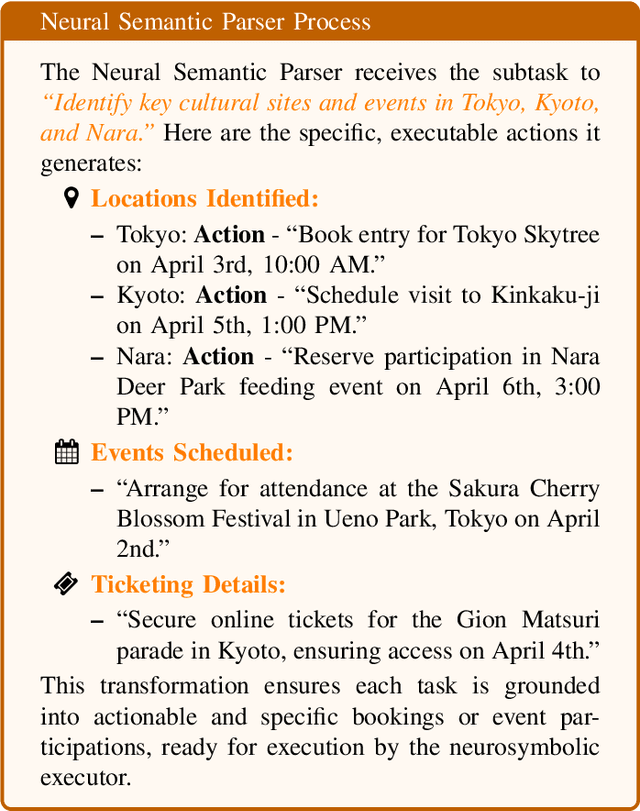
Generative AI, especially via Large Language Models (LLMs), has transformed content creation across text, images, and music, showcasing capabilities in following instructions through prompting, largely facilitated by instruction tuning. Instruction tuning is a supervised fine-tuning method where LLMs are trained on datasets formatted with specific tasks and corresponding instructions. This method systematically enhances the model's ability to comprehend and execute the provided directives. Despite these advancements, LLMs still face challenges in consistently interpreting complex, multi-step instructions and generalizing them to novel tasks, which are essential for broader applicability in real-world scenarios. This article explores why neurosymbolic AI offers a better path to enhance the instructability of LLMs. We explore the use a symbolic task planner to decompose high-level instructions into structured tasks, a neural semantic parser to ground these tasks into executable actions, and a neuro-symbolic executor to implement these actions while dynamically maintaining an explicit representation of state. We also seek to show that neurosymbolic approach enhances the reliability and context-awareness of task execution, enabling LLMs to dynamically interpret and respond to a wider range of instructional contexts with greater precision and flexibility.
PLANTS: A Novel Problem and Dataset for Summarization of Planning-Like (PL) Tasks
Jul 18, 2024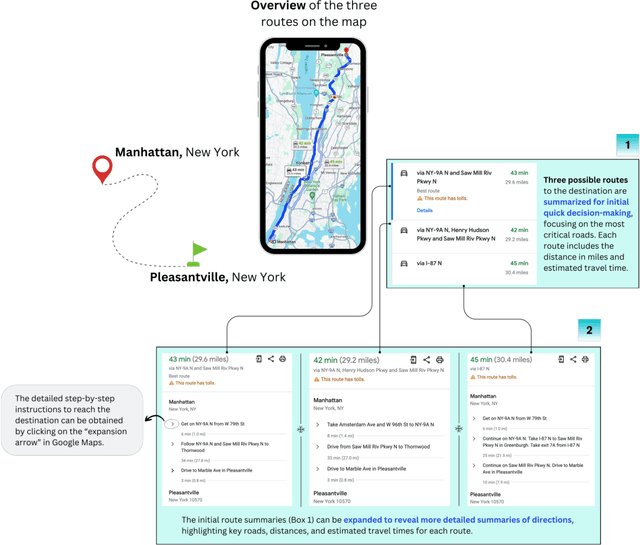
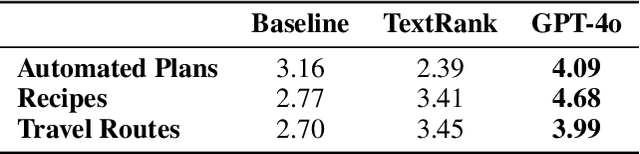
Text summarization is a well-studied problem that deals with deriving insights from unstructured text consumed by humans, and it has found extensive business applications. However, many real-life tasks involve generating a series of actions to achieve specific goals, such as workflows, recipes, dialogs, and travel plans. We refer to them as planning-like (PL) tasks noting that the main commonality they share is control flow information. which may be partially specified. Their structure presents an opportunity to create more practical summaries to help users make quick decisions. We investigate this observation by introducing a novel plan summarization problem, presenting a dataset, and providing a baseline method for generating PL summaries. Using quantitative metrics and qualitative user studies to establish baselines, we evaluate the plan summaries from our method and large language models. We believe the novel problem and dataset can reinvigorate research in summarization, which some consider as a solved problem.
The Case for Developing a Foundation Model for Planning-like Tasks from Scratch
Apr 06, 2024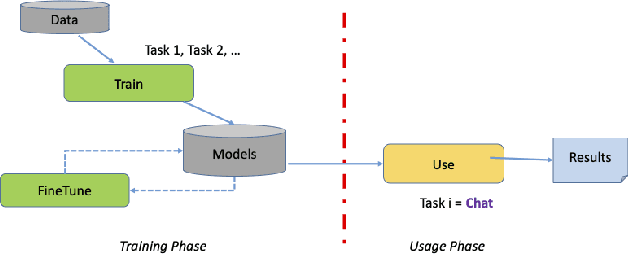
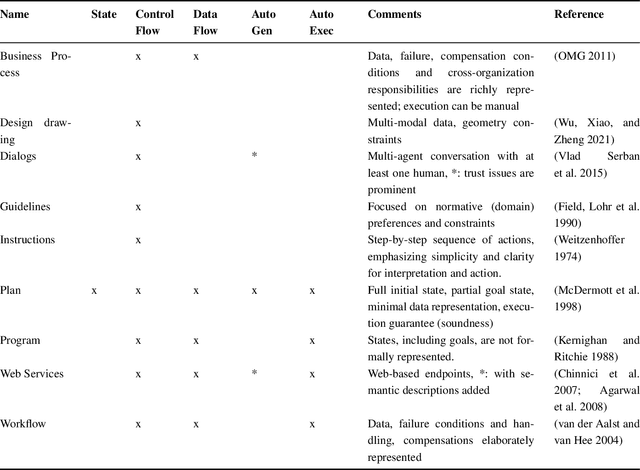
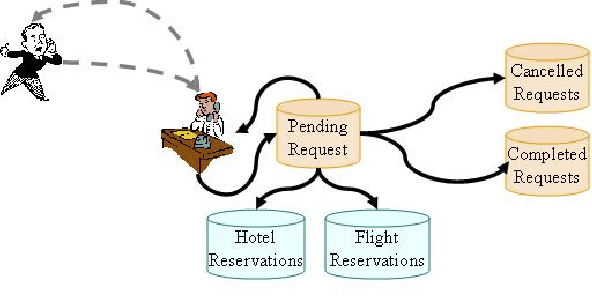
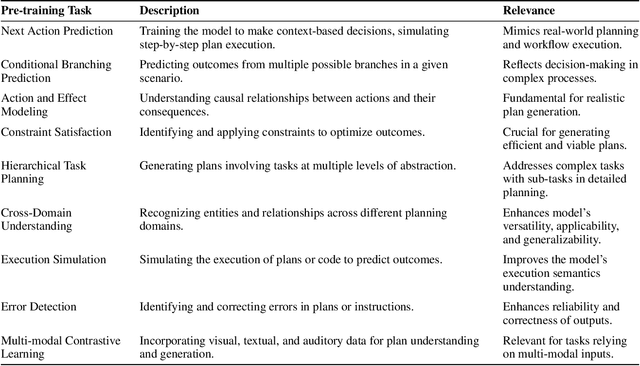
Foundation Models (FMs) have revolutionized many areas of computing, including Automated Planning and Scheduling (APS). For example, a recent study found them useful for planning problems: plan generation, language translation, model construction, multi-agent planning, interactive planning, heuristics optimization, tool integration, and brain-inspired planning. Besides APS, there are many seemingly related tasks involving the generation of a series of actions with varying guarantees of their executability to achieve intended goals, which we collectively call planning-like (PL) tasks like business processes, programs, workflows, and guidelines, where researchers have considered using FMs. However, previous works have primarily focused on pre-trained, off-the-shelf FMs and optionally fine-tuned them. This paper discusses the need for a comprehensive FM for PL tasks from scratch and explores its design considerations. We argue that such an FM will open new and efficient avenues for PL problem-solving, just like LLMs are creating for APS.
On the Prospects of Incorporating Large Language Models (LLMs) in Automated Planning and Scheduling (APS)
Jan 04, 2024



Automated Planning and Scheduling is among the growing areas in Artificial Intelligence (AI) where mention of LLMs has gained popularity. Based on a comprehensive review of 126 papers, this paper investigates eight categories based on the unique applications of LLMs in addressing various aspects of planning problems: language translation, plan generation, model construction, multi-agent planning, interactive planning, heuristics optimization, tool integration, and brain-inspired planning. For each category, we articulate the issues considered and existing gaps. A critical insight resulting from our review is that the true potential of LLMs unfolds when they are integrated with traditional symbolic planners, pointing towards a promising neuro-symbolic approach. This approach effectively combines the generative aspects of LLMs with the precision of classical planning methods. By synthesizing insights from existing literature, we underline the potential of this integration to address complex planning challenges. Our goal is to encourage the ICAPS community to recognize the complementary strengths of LLMs and symbolic planners, advocating for a direction in automated planning that leverages these synergistic capabilities to develop more advanced and intelligent planning systems.
On Solving the Rubik's Cube with Domain-Independent Planners Using Standard Representations
Jul 25, 2023



Rubik's Cube (RC) is a well-known and computationally challenging puzzle that has motivated AI researchers to explore efficient alternative representations and problem-solving methods. The ideal situation for planning here is that a problem be solved optimally and efficiently represented in a standard notation using a general-purpose solver and heuristics. The fastest solver today for RC is DeepCubeA with a custom representation, and another approach is with Scorpion planner with State-Action-Space+ (SAS+) representation. In this paper, we present the first RC representation in the popular PDDL language so that the domain becomes more accessible to PDDL planners, competitions, and knowledge engineering tools, and is more human-readable. We then bridge across existing approaches and compare performance. We find that in one comparable experiment, DeepCubeA solves all problems with varying complexities, albeit only 18\% are optimal plans. For the same problem set, Scorpion with SAS+ representation and pattern database heuristics solves 61.50\% problems, while FastDownward with PDDL representation and FF heuristic solves 56.50\% problems, out of which all the plans generated were optimal. Our study provides valuable insights into the trade-offs between representational choice and plan optimality that can help researchers design future strategies for challenging domains combining general-purpose solving methods (planning, reinforcement learning), heuristics, and representations (standard or custom).
A Planning Ontology to Represent and Exploit Planning Knowledge for Performance Efficiency
Jul 25, 2023Ontologies are known for their ability to organize rich metadata, support the identification of novel insights via semantic queries, and promote reuse. In this paper, we consider the problem of automated planning, where the objective is to find a sequence of actions that will move an agent from an initial state of the world to a desired goal state. We hypothesize that given a large number of available planners and diverse planning domains; they carry essential information that can be leveraged to identify suitable planners and improve their performance for a domain. We use data on planning domains and planners from the International Planning Competition (IPC) to construct a planning ontology and demonstrate via experiments in two use cases that the ontology can lead to the selection of promising planners and improving their performance using macros - a form of action ordering constraints extracted from planning ontology. We also make the planning ontology and associated resources available to the community to promote further research.