 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Agreement via Anchoring
Feb 26, 2026Numerous lines of aim to control $\textit{model disagreement}$ -- the extent to which two machine learning models disagree in their predictions. We adopt a simple and standard notion of model disagreement in real-valued prediction problems, namely the expected squared difference in predictions between two models trained on independent samples, without any coordination of the training processes. We would like to be able to drive disagreement to zero with some natural parameter(s) of the training procedure using analyses that can be applied to existing training methodologies. We develop a simple general technique for proving bounds on independent model disagreement based on $\textit{anchoring}$ to the average of two models within the analysis. We then apply this technique to prove disagreement bounds for four commonly used machine learning algorithms: (1) stacked aggregation over an arbitrary model class (where disagreement is driven to 0 with the number of models $k$ being stacked) (2) gradient boosting (where disagreement is driven to 0 with the number of iterations $k$) (3) neural network training with architecture search (where disagreement is driven to 0 with the size $n$ of the architecture being optimized over) and (4) regression tree training over all regression trees of fixed depth (where disagreement is driven to 0 with the depth $d$ of the tree architecture). For clarity, we work out our initial bounds in the setting of one-dimensional regression with squared error loss -- but then show that all of our results generalize to multi-dimensional regression with any strongly convex loss.
Prior-Agnostic Incentive-Compatible Exploration
Feb 24, 2026In bandit settings, optimizing long-term regret metrics requires exploration, which corresponds to sometimes taking myopically sub-optimal actions. When a long-lived principal merely recommends actions to be executed by a sequence of different agents (as in an online recommendation platform) this provides an incentive misalignment: exploration is "worth it" for the principal but not for the agents. Prior work studies regret minimization under the constraint of Bayesian Incentive-Compatibility in a static stochastic setting with a fixed and common prior shared amongst the agents and the algorithm designer. We show that (weighted) swap regret bounds on their own suffice to cause agents to faithfully follow forecasts in an approximate Bayes Nash equilibrium, even in dynamic environments in which agents have conflicting prior beliefs and the mechanism designer has no knowledge of any agents beliefs. To obtain these bounds, it is necessary to assume that the agents have some degree of uncertainty not just about the rewards, but about their arrival time -- i.e. their relative position in the sequence of agents served by the algorithm. We instantiate our abstract bounds with concrete algorithms for guaranteeing adaptive and weighted regret in bandit settings.
Dynamic Regret Bounds for Online Omniprediction with Long Term Constraints
Oct 08, 2025We present an algorithm guaranteeing dynamic regret bounds for online omniprediction with long term constraints. The goal in this recently introduced problem is for a learner to generate a sequence of predictions which are broadcast to a collection of downstream decision makers. Each decision maker has their own utility function, as well as a vector of constraint functions, each mapping their actions and an adversarially selected state to reward or constraint violation terms. The downstream decision makers select actions "as if" the state predictions are correct, and the goal of the learner is to produce predictions such that all downstream decision makers choose actions that give them worst-case utility guarantees while minimizing worst-case constraint violation. Within this framework, we give the first algorithm that obtains simultaneous \emph{dynamic regret} guarantees for all of the agents -- where regret for each agent is measured against a potentially changing sequence of actions across rounds of interaction, while also ensuring vanishing constraint violation for each agent. Our results do not require the agents themselves to maintain any state -- they only solve one-round constrained optimization problems defined by the prediction made at that round.
Emergent Alignment via Competition
Sep 18, 2025Aligning AI systems with human values remains a fundamental challenge, but does our inability to create perfectly aligned models preclude obtaining the benefits of alignment? We study a strategic setting where a human user interacts with multiple differently misaligned AI agents, none of which are individually well-aligned. Our key insight is that when the users utility lies approximately within the convex hull of the agents utilities, a condition that becomes easier to satisfy as model diversity increases, strategic competition can yield outcomes comparable to interacting with a perfectly aligned model. We model this as a multi-leader Stackelberg game, extending Bayesian persuasion to multi-round conversations between differently informed parties, and prove three results: (1) when perfect alignment would allow the user to learn her Bayes-optimal action, she can also do so in all equilibria under the convex hull condition (2) under weaker assumptions requiring only approximate utility learning, a non-strategic user employing quantal response achieves near-optimal utility in all equilibria and (3) when the user selects the best single AI after an evaluation period, equilibrium guarantees remain near-optimal without further distributional assumptions. We complement the theory with two sets of experiments.
Replicable Reinforcement Learning with Linear Function Approximation
Sep 10, 2025Replication of experimental results has been a challenge faced by many scientific disciplines, including the field of machine learning. Recent work on the theory of machine learning has formalized replicability as the demand that an algorithm produce identical outcomes when executed twice on different samples from the same distribution. Provably replicable algorithms are especially interesting for reinforcement learning (RL), where algorithms are known to be unstable in practice. While replicable algorithms exist for tabular RL settings, extending these guarantees to more practical function approximation settings has remained an open problem. In this work, we make progress by developing replicable methods for linear function approximation in RL. We first introduce two efficient algorithms for replicable random design regression and uncentered covariance estimation, each of independent interest. We then leverage these tools to provide the first provably efficient replicable RL algorithms for linear Markov decision processes in both the generative model and episodic settings. Finally, we evaluate our algorithms experimentally and show how they can inspire more consistent neural policies.
Conformal Language Model Reasoning with Coherent Factuality
May 21, 2025Language models are increasingly being used in important decision pipelines, so ensuring the correctness of their outputs is crucial. Recent work has proposed evaluating the "factuality" of claims decomposed from a language model generation and applying conformal prediction techniques to filter out those claims that are not factual. This can be effective for tasks such as information retrieval, where constituent claims may be evaluated in isolation for factuality, but is not appropriate for reasoning tasks, as steps of a logical argument can be evaluated for correctness only within the context of the claims that precede them. To capture this, we define "coherent factuality" and develop a conformal-prediction-based method to guarantee coherent factuality for language model outputs. Our approach applies split conformal prediction to subgraphs within a "deducibility" graph" that represents the steps of a reasoning problem. We evaluate our method on mathematical reasoning problems from the MATH and FELM datasets and find that our algorithm consistently produces correct and substantiated orderings of claims, achieving coherent factuality across target coverage levels. Moreover, we achieve 90% factuality on our stricter definition while retaining 80% or more of the original claims, highlighting the utility of our deducibility-graph-guided approach.
Collaborative Prediction: Tractable Information Aggregation via Agreement
Apr 08, 2025We give efficient "collaboration protocols" through which two parties, who observe different features about the same instances, can interact to arrive at predictions that are more accurate than either could have obtained on their own. The parties only need to iteratively share and update their own label predictions-without either party ever having to share the actual features that they observe. Our protocols are efficient reductions to the problem of learning on each party's feature space alone, and so can be used even in settings in which each party's feature space is illegible to the other-which arises in models of human/AI interaction and in multi-modal learning. The communication requirements of our protocols are independent of the dimensionality of the data. In an online adversarial setting we show how to give regret bounds on the predictions that the parties arrive at with respect to a class of benchmark policies defined on the joint feature space of the two parties, despite the fact that neither party has access to this joint feature space. We also give simpler algorithms for the same task in the batch setting in which we assume that there is a fixed but unknown data distribution. We generalize our protocols to a decision theoretic setting with high dimensional outcome spaces, where parties communicate only "best response actions." Our theorems give a computationally and statistically tractable generalization of past work on information aggregation amongst Bayesians who share a common and correct prior, as part of a literature studying "agreement" in the style of Aumann's agreement theorem. Our results require no knowledge of (or even the existence of) a prior distribution and are computationally efficient. Nevertheless we show how to lift our theorems back to this classical Bayesian setting, and in doing so, give new information aggregation theorems for Bayesian agreement.
Stronger Neyman Regret Guarantees for Adaptive Experimental Design
Feb 24, 2025We study the design of adaptive, sequential experiments for unbiased average treatment effect (ATE) estimation in the design-based potential outcomes setting. Our goal is to develop adaptive designs offering sublinear Neyman regret, meaning their efficiency must approach that of the hindsight-optimal nonadaptive design. Recent work [Dai et al, 2023] introduced ClipOGD, the first method achieving $\widetilde{O}(\sqrt{T})$ expected Neyman regret under mild conditions. In this work, we propose adaptive designs with substantially stronger Neyman regret guarantees. In particular, we modify ClipOGD to obtain anytime $\widetilde{O}(\log T)$ Neyman regret under natural boundedness assumptions. Further, in the setting where experimental units have pre-treatment covariates, we introduce and study a class of contextual "multigroup" Neyman regret guarantees: Given any set of possibly overlapping groups based on the covariates, the adaptive design outperforms each group's best non-adaptive designs. In particular, we develop a contextual adaptive design with $\widetilde{O}(\sqrt{T})$ anytime multigroup Neyman regret. We empirically validate the proposed designs through an array of experiments.
Sample Efficient Omniprediction and Downstream Swap Regret for Non-Linear Losses
Feb 18, 2025We define "decision swap regret" which generalizes both prediction for downstream swap regret and omniprediction, and give algorithms for obtaining it for arbitrary multi-dimensional Lipschitz loss functions in online adversarial settings. We also give sample complexity bounds in the batch setting via an online-to-batch reduction. When applied to omniprediction, our algorithm gives the first polynomial sample-complexity bounds for Lipschitz loss functions -- prior bounds either applied only to linear loss (or binary outcomes) or scaled exponentially with the error parameter even under the assumption that the loss functions were convex. When applied to prediction for downstream regret, we give the first algorithm capable of guaranteeing swap regret bounds for all downstream agents with non-linear loss functions over a multi-dimensional outcome space: prior work applied only to linear loss functions, modeling risk neutral agents. Our general bounds scale exponentially with the dimension of the outcome space, but we give improved regret and sample complexity bounds for specific families of multidimensional functions of economic interest: constant elasticity of substitution (CES), Cobb-Douglas, and Leontief utility functions.
Intersectional Fairness in Reinforcement Learning with Large State and Constraint Spaces
Feb 17, 2025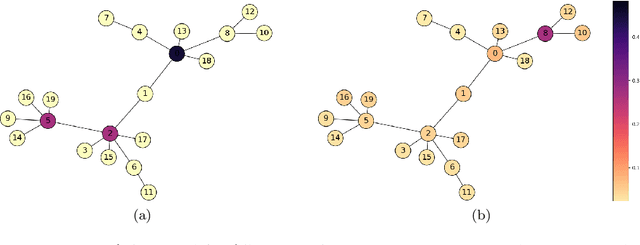


In traditional reinforcement learning (RL), the learner aims to solve a single objective optimization problem: find the policy that maximizes expected reward. However, in many real-world settings, it is important to optimize over multiple objectives simultaneously. For example, when we are interested in fairness, states might have feature annotations corresponding to multiple (intersecting) demographic groups to whom reward accrues, and our goal might be to maximize the reward of the group receiving the minimal reward. In this work, we consider a multi-objective optimization problem in which each objective is defined by a state-based reweighting of a single scalar reward function. This generalizes the problem of maximizing the reward of the minimum reward group. We provide oracle-efficient algorithms to solve these multi-objective RL problems even when the number of objectives is exponentially large-for tabular MDPs, as well as for large MDPs when the group functions have additional structure. Finally, we experimentally validate our theoretical results and demonstrate applications on a preferential attachment graph MDP.