 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParkGaussian: Surround-view 3D Gaussian Splatting for Autonomous Parking
Jan 04, 2026Parking is a critical task for autonomous driving systems (ADS), with unique challenges in crowded parking slots and GPS-denied environments. However, existing works focus on 2D parking slot perception, mapping, and localization, 3D reconstruction remains underexplored, which is crucial for capturing complex spatial geometry in parking scenarios. Naively improving the visual quality of reconstructed parking scenes does not directly benefit autonomous parking, as the key entry point for parking is the slots perception module. To address these limitations, we curate the first benchmark named ParkRecon3D, specifically designed for parking scene reconstruction. It includes sensor data from four surround-view fisheye cameras with calibrated extrinsics and dense parking slot annotations. We then propose ParkGaussian, the first framework that integrates 3D Gaussian Splatting (3DGS) for parking scene reconstruction. To further improve the alignment between reconstruction and downstream parking slot detection, we introduce a slot-aware reconstruction strategy that leverages existing parking perception methods to enhance the synthesis quality of slot regions. Experiments on ParkRecon3D demonstrate that ParkGaussian achieves state-of-the-art reconstruction quality and better preserves perception consistency for downstream tasks. The code and dataset will be released at: https://github.com/wm-research/ParkGaussian
Capturing Stable HDR Videos Using a Dual-Camera System
Jul 09, 2025In HDR video reconstruction, exposure fluctuations in reference images from alternating exposure methods often result in flickering. To address this issue, we propose a dual-camera system (DCS) for HDR video acquisition, where one camera is assigned to capture consistent reference sequences, while the other is assigned to capture non-reference sequences for information supplementation. To tackle the challenges posed by video data, we introduce an exposure-adaptive fusion network (EAFNet) to achieve more robust results. EAFNet introduced a pre-alignment subnetwork to explore the influence of exposure, selectively emphasizing the valuable features across different exposure levels. Then, the enhanced features are fused by the asymmetric cross-feature fusion subnetwork, which explores reference-dominated attention maps to improve image fusion by aligning cross-scale features and performing cross-feature fusion. Finally, the reconstruction subnetwork adopts a DWT-based multiscale architecture to reduce ghosting artifacts and refine features at different resolutions. Extensive experimental evaluations demonstrate that the proposed method achieves state-of-the-art performance on different datasets, validating the great potential of the DCS in HDR video reconstruction. The codes and data captured by DCS will be available at https://github.com/zqqqyu/DCS.
K-Buffers: A Plug-in Method for Enhancing Neural Fields with Multiple Buffers
May 26, 2025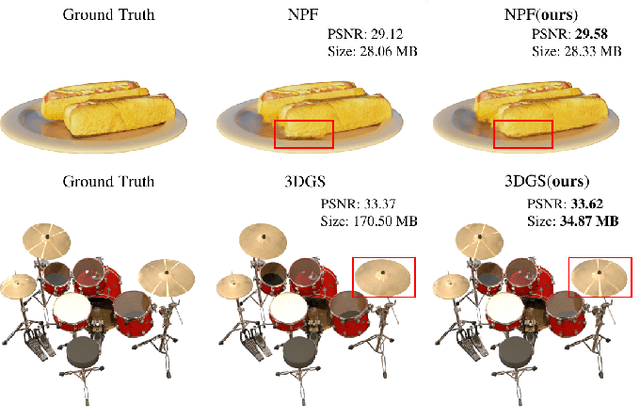
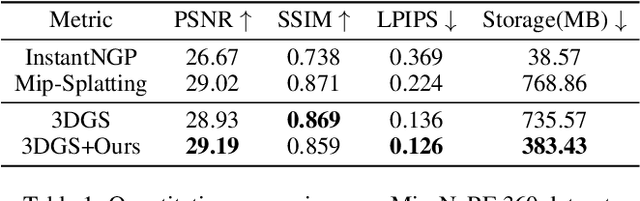
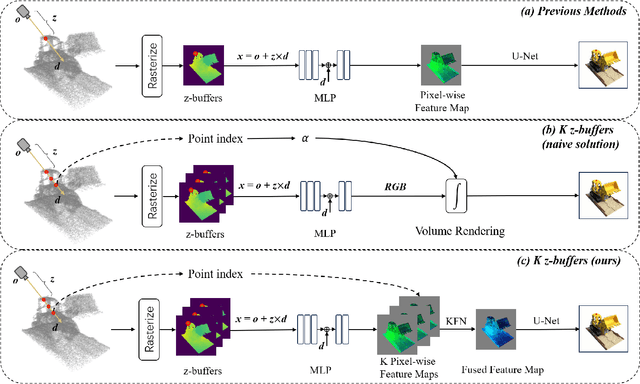
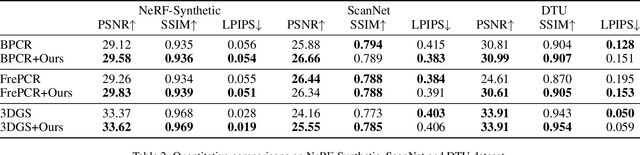
Neural fields are now the central focus of research in 3D vision and computer graphics. Existing methods mainly focus on various scene representations, such as neural points and 3D Gaussians. However, few works have studied the rendering process to enhance the neural fields. In this work, we propose a plug-in method named K-Buffers that leverages multiple buffers to improve the rendering performance. Our method first renders K buffers from scene representations and constructs K pixel-wise feature maps. Then, We introduce a K-Feature Fusion Network (KFN) to merge the K pixel-wise feature maps. Finally, we adopt a feature decoder to generate the rendering image. We also introduce an acceleration strategy to improve rendering speed and quality. We apply our method to well-known radiance field baselines, including neural point fields and 3D Gaussian Splatting (3DGS). Extensive experiments demonstrate that our method effectively enhances the rendering performance of neural point fields and 3DGS.
Progressive Inertial Poser: Progressive Real-Time Kinematic Chain Estimation for 3D Full-Body Pose from Three IMU Sensors
May 08, 2025The motion capture system that supports full-body virtual representation is of key significance for virtual reality. Compared to vision-based systems, full-body pose estimation from sparse tracking signals is not limited by environmental conditions or recording range. However, previous works either face the challenge of wearing additional sensors on the pelvis and lower-body or rely on external visual sensors to obtain global positions of key joints. To improve the practicality of the technology for virtual reality applications, we estimate full-body poses using only inertial data obtained from three Inertial Measurement Unit (IMU) sensors worn on the head and wrists, thereby reducing the complexity of the hardware system. In this work, we propose a method called Progressive Inertial Poser (ProgIP) for human pose estimation, which combines neural network estimation with a human dynamics model, considers the hierarchical structure of the kinematic chain, and employs a multi-stage progressive network estimation with increased depth to reconstruct full-body motion in real time. The encoder combines Transformer Encoder and bidirectional LSTM (TE-biLSTM) to flexibly capture the temporal dependencies of the inertial sequence, while the decoder based on multi-layer perceptrons (MLPs) transforms high-dimensional features and accurately projects them onto Skinned Multi-Person Linear (SMPL) model parameters. Quantitative and qualitative experimental results on multiple public datasets show that our method outperforms state-of-the-art methods with the same inputs, and is comparable to recent works using six IMU sensors.
4D Gaussian Splatting SLAM
Mar 20, 2025Simultaneously localizing camera poses and constructing Gaussian radiance fields in dynamic scenes establish a crucial bridge between 2D images and the 4D real world. Instead of removing dynamic objects as distractors and reconstructing only static environments, this paper proposes an efficient architecture that incrementally tracks camera poses and establishes the 4D Gaussian radiance fields in unknown scenarios by using a sequence of RGB-D images. First, by generating motion masks, we obtain static and dynamic priors for each pixel. To eliminate the influence of static scenes and improve the efficiency on learning the motion of dynamic objects, we classify the Gaussian primitives into static and dynamic Gaussian sets, while the sparse control points along with an MLP is utilized to model the transformation fields of the dynamic Gaussians. To more accurately learn the motion of dynamic Gaussians, a novel 2D optical flow map reconstruction algorithm is designed to render optical flows of dynamic objects between neighbor images, which are further used to supervise the 4D Gaussian radiance fields along with traditional photometric and geometric constraints. In experiments, qualitative and quantitative evaluation results show that the proposed method achieves robust tracking and high-quality view synthesis performance in real-world environments.
Robust Gaussian Splatting SLAM by Leveraging Loop Closure
Sep 30, 20243D Gaussian Splatting algorithms excel in novel view rendering applications and have been adapted to extend the capabilities of traditional SLAM systems. However, current Gaussian Splatting SLAM methods, designed mainly for hand-held RGB or RGB-D sensors, struggle with tracking drifts when used with rotating RGB-D camera setups. In this paper, we propose a robust Gaussian Splatting SLAM architecture that utilizes inputs from rotating multiple RGB-D cameras to achieve accurate localization and photorealistic rendering performance. The carefully designed Gaussian Splatting Loop Closure module effectively addresses the issue of accumulated tracking and mapping errors found in conventional Gaussian Splatting SLAM systems. First, each Gaussian is associated with an anchor frame and categorized as historical or novel based on its timestamp. By rendering different types of Gaussians at the same viewpoint, the proposed loop detection strategy considers both co-visibility relationships and distinct rendering outcomes. Furthermore, a loop closure optimization approach is proposed to remove camera pose drift and maintain the high quality of 3D Gaussian models. The approach uses a lightweight pose graph optimization algorithm to correct pose drift and updates Gaussians based on the optimized poses. Additionally, a bundle adjustment scheme further refines camera poses using photometric and geometric constraints, ultimately enhancing the global consistency of scenarios. Quantitative and qualitative evaluations on both synthetic and real-world datasets demonstrate that our method outperforms state-of-the-art methods in camera pose estimation and novel view rendering tasks. The code will be open-sourced for the community.
ThermalGaussian: Thermal 3D Gaussian Splatting
Sep 11, 2024



Thermography is especially valuable for the military and other users of surveillance cameras. Some recent methods based on Neural Radiance Fields (NeRF) are proposed to reconstruct the thermal scenes in 3D from a set of thermal and RGB images. However, unlike NeRF, 3D Gaussian splatting (3DGS) prevails due to its rapid training and real-time rendering. In this work, we propose ThermalGaussian, the first thermal 3DGS approach capable of rendering high-quality images in RGB and thermal modalities. We first calibrate the RGB camera and the thermal camera to ensure that both modalities are accurately aligned. Subsequently, we use the registered images to learn the multimodal 3D Gaussians. To prevent the overfitting of any single modality, we introduce several multimodal regularization constraints. We also develop smoothing constraints tailored to the physical characteristics of the thermal modality. Besides, we contribute a real-world dataset named RGBT-Scenes, captured by a hand-hold thermal-infrared camera, facilitating future research on thermal scene reconstruction. We conduct comprehensive experiments to show that ThermalGaussian achieves photorealistic rendering of thermal images and improves the rendering quality of RGB images. With the proposed multimodal regularization constraints, we also reduced the model's storage cost by 90\%. The code and dataset will be released.
Rethinking Boundary Discontinuity Problem for Oriented Object Detection
May 17, 2023



Oriented object detection has been developed rapidly in the past few years, where rotation equivariant is crucial for detectors to predict rotated bounding boxes. It is expected that the prediction can maintain the corresponding rotation when objects rotate, but severe mutational in angular prediction is sometimes observed when objects rotate near the boundary angle, which is well-known boundary discontinuity problem. The problem has been long believed to be caused by the sharp loss increase at the angular boundary during training, and widely used IoU-like loss generally deal with this problem by loss-smoothing. However, we experimentally find that even state-of-the-art IoU-like methods do not actually solve the problem. On further analysis, we find the essential cause of the problem lies at discontinuous angular ground-truth(box), not just discontinuous loss. There always exists an irreparable gap between continuous model ouput and discontinuous angular ground-truth, so angular prediction near the breakpoints becomes highly unstable, which cannot be eliminated just by loss-smoothing in IoU-like methods. To thoroughly solve this problem, we propose a simple and effective Angle Correct Module (ACM) based on polar coordinate decomposition. ACM can be easily plugged into the workflow of oriented object detectors to repair angular prediction. It converts the smooth value of the model output into sawtooth angular value, and then IoU-like loss can fully release their potential. Extensive experiments on multiple datasets show that whether Gaussian-based or SkewIoU methods are improved to the same performance of AP50 and AP75 with the enhancement of ACM.
Learning Cross-view Geo-localization Embeddings via Dynamic Weighted Decorrelation Regularization
Nov 10, 2022Cross-view geo-localization aims to spot images of the same location shot from two platforms, e.g., the drone platform and the satellite platform. Existing methods usually focus on optimizing the distance between one embedding with others in the feature space, while neglecting the redundancy of the embedding itself. In this paper, we argue that the low redundancy is also of importance, which motivates the model to mine more diverse patterns. To verify this point, we introduce a simple yet effective regularization, i.e., Dynamic Weighted Decorrelation Regularization (DWDR), to explicitly encourage networks to learn independent embedding channels. As the name implies, DWDR regresses the embedding correlation coefficient matrix to a sparse matrix, i.e., the identity matrix, with dynamic weights. The dynamic weights are applied to focus on still correlated channels during training. Besides, we propose a cross-view symmetric sampling strategy, which keeps the example balance between different platforms. Albeit simple, the proposed method has achieved competitive results on three large-scale benchmarks, i.e., University-1652, CVUSA and CVACT. Moreover, under the harsh circumstance, e.g., the extremely short feature of 64 dimensions, the proposed method surpasses the baseline model by a clear margin.
Real-time Indoor Scene Reconstruction with RGBD and Inertia Input
Dec 07, 2018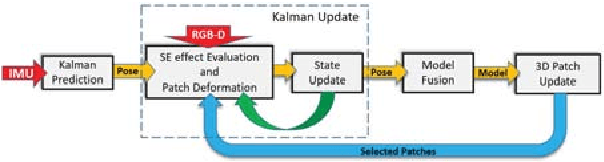
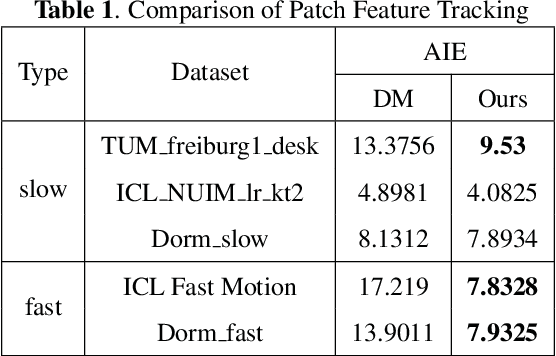

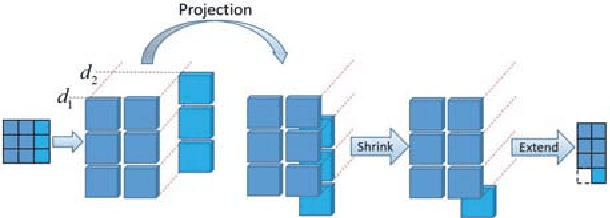
Camera motion estimation is a key technique for 3D scene reconstruction and Simultaneous localization and mapping (SLAM). To make it be feasibly achieved, previous works usually assume slow camera motions, which limits its usage in many real cases. We propose an end-to-end 3D reconstruction system which combines color, depth and inertial measurements to achieve robust reconstruction with fast sensor motions. Our framework extends Kalman filter to fuse the three kinds of information and involve an iterative method to jointly optimize feature correspondences, camera poses and scene geometry. We also propose a novel geometry-aware patch deformation technique to adapt the feature appearance in image domain, leading to a more accurate feature matching under fast camera motions. Experiments show that our patch deformation method improves the accuracy of feature tracking, and our 3D reconstruction outperforms the state-of-the-art solutions under fast camera motions.