 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenGaFF: Open-Vocabulary Gaussian Feature Field with Codebook Attention
May 07, 2026Understanding open-vocabulary 3D scenes with Gaussian-based representations remains challenging due to fragmented and spatially inconsistent semantic predictions across multi-view observations. In this paper, we present OpenGaFF, a novel framework for open-vocabulary 3D scene understanding built upon 3D Gaussian Splatting. At the core of our method is a Gaussian Feature Field that models semantics as a continuous function of Gaussian geometry and appearance. By explicitly conditioning semantic predictions on geometric structure, this formulation strengthens the coupling between geometry and semantics, leading to improved spatial coherence across similar structures in 3D space. To further enforce object-level semantic consistency, we introduce a structured codebook that serves as a set of shared semantic primitives. Furthermore, a codebook-guided attention mechanism is proposed to retrieve language features via similarity matching between query embeddings and learned codebook entries, enabling robust open-vocabulary reasoning while reducing intra-object feature variance. Extensive experiments on standard 2D and 3D open-vocabulary benchmarks demonstrate that our method consistently outperforms prior approaches, achieving improved segmentation quality, stronger 3D semantic consistency and a semantically interpretable codebook that provides insight into the learned representation.
GALA: Guided Attention with Language Alignment for Open Vocabulary Gaussian Splatting
Aug 21, 2025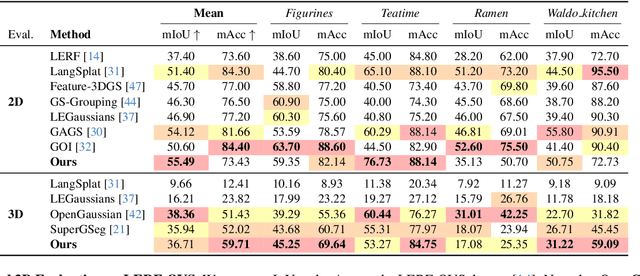
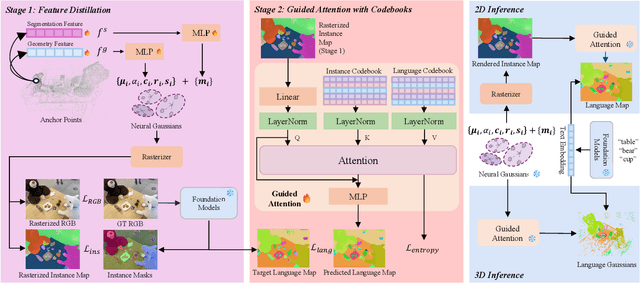
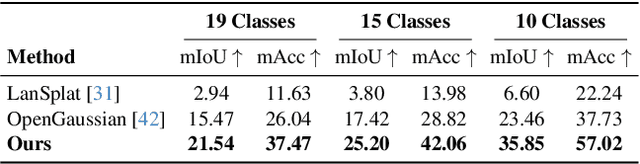
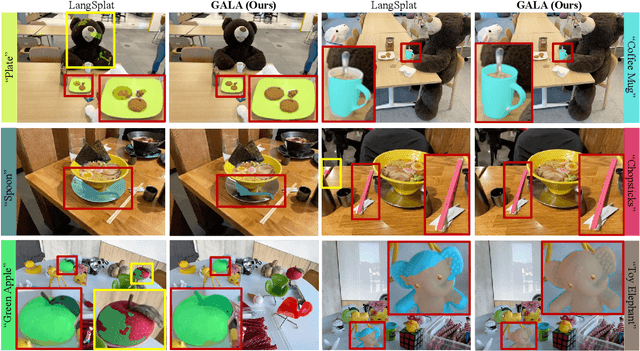
3D scene reconstruction and understanding have gained increasing popularity, yet existing methods still struggle to capture fine-grained, language-aware 3D representations from 2D images. In this paper, we present GALA, a novel framework for open-vocabulary 3D scene understanding with 3D Gaussian Splatting (3DGS). GALA distills a scene-specific 3D instance feature field via self-supervised contrastive learning. To extend to generalized language feature fields, we introduce the core contribution of GALA, a cross-attention module with two learnable codebooks that encode view-independent semantic embeddings. This design not only ensures intra-instance feature similarity but also supports seamless 2D and 3D open-vocabulary queries. It reduces memory consumption by avoiding per-Gaussian high-dimensional feature learning. Extensive experiments on real-world datasets demonstrate GALA's remarkable open-vocabulary performance on both 2D and 3D.
4D Gaussian Splatting SLAM
Mar 20, 2025Simultaneously localizing camera poses and constructing Gaussian radiance fields in dynamic scenes establish a crucial bridge between 2D images and the 4D real world. Instead of removing dynamic objects as distractors and reconstructing only static environments, this paper proposes an efficient architecture that incrementally tracks camera poses and establishes the 4D Gaussian radiance fields in unknown scenarios by using a sequence of RGB-D images. First, by generating motion masks, we obtain static and dynamic priors for each pixel. To eliminate the influence of static scenes and improve the efficiency on learning the motion of dynamic objects, we classify the Gaussian primitives into static and dynamic Gaussian sets, while the sparse control points along with an MLP is utilized to model the transformation fields of the dynamic Gaussians. To more accurately learn the motion of dynamic Gaussians, a novel 2D optical flow map reconstruction algorithm is designed to render optical flows of dynamic objects between neighbor images, which are further used to supervise the 4D Gaussian radiance fields along with traditional photometric and geometric constraints. In experiments, qualitative and quantitative evaluation results show that the proposed method achieves robust tracking and high-quality view synthesis performance in real-world environments.
SuperGSeg: Open-Vocabulary 3D Segmentation with Structured Super-Gaussians
Dec 13, 2024



3D Gaussian Splatting has recently gained traction for its efficient training and real-time rendering. While the vanilla Gaussian Splatting representation is mainly designed for view synthesis, more recent works investigated how to extend it with scene understanding and language features. However, existing methods lack a detailed comprehension of scenes, limiting their ability to segment and interpret complex structures. To this end, We introduce SuperGSeg, a novel approach that fosters cohesive, context-aware scene representation by disentangling segmentation and language field distillation. SuperGSeg first employs neural Gaussians to learn instance and hierarchical segmentation features from multi-view images with the aid of off-the-shelf 2D masks. These features are then leveraged to create a sparse set of what we call Super-Gaussians. Super-Gaussians facilitate the distillation of 2D language features into 3D space. Through Super-Gaussians, our method enables high-dimensional language feature rendering without extreme increases in GPU memory. Extensive experiments demonstrate that SuperGSeg outperforms prior works on both open-vocabulary object localization and semantic segmentation tasks.
G2SDF: Surface Reconstruction from Explicit Gaussians with Implicit SDFs
Nov 25, 2024



State-of-the-art novel view synthesis methods such as 3D Gaussian Splatting (3DGS) achieve remarkable visual quality. While 3DGS and its variants can be rendered efficiently using rasterization, many tasks require access to the underlying 3D surface, which remains challenging to extract due to the sparse and explicit nature of this representation. In this paper, we introduce G2SDF, a novel approach that addresses this limitation by integrating a neural implicit Signed Distance Field (SDF) into the Gaussian Splatting framework. Our method links the opacity values of Gaussians with their distances to the surface, ensuring a closer alignment of Gaussians with the scene surface. To extend this approach to unbounded scenes at varying scales, we propose a normalization function that maps any range to a fixed interval. To further enhance reconstruction quality, we leverage an off-the-shelf depth estimator as pseudo ground truth during Gaussian Splatting optimization. By establishing a differentiable connection between the explicit Gaussians and the implicit SDF, our approach enables high-quality surface reconstruction and rendering. Experimental results on several real-world datasets demonstrate that G2SDF achieves superior reconstruction quality than prior works while maintaining the efficiency of 3DGS.
DNS SLAM: Dense Neural Semantic-Informed SLAM
Nov 30, 2023In recent years, coordinate-based neural implicit representations have shown promising results for the task of Simultaneous Localization and Mapping (SLAM). While achieving impressive performance on small synthetic scenes, these methods often suffer from oversmoothed reconstructions, especially for complex real-world scenes. In this work, we introduce DNS SLAM, a novel neural RGB-D semantic SLAM approach featuring a hybrid representation. Relying only on 2D semantic priors, we propose the first semantic neural SLAM method that trains class-wise scene representations while providing stable camera tracking at the same time. Our method integrates multi-view geometry constraints with image-based feature extraction to improve appearance details and to output color, density, and semantic class information, enabling many downstream applications. To further enable real-time tracking, we introduce a lightweight coarse scene representation which is trained in a self-supervised manner in latent space. Our experimental results achieve state-of-the-art performance on both synthetic data and real-world data tracking while maintaining a commendable operational speed on off-the-shelf hardware. Further, our method outputs class-wise decomposed reconstructions with better texture capturing appearance and geometric details.