 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParkGaussian: Surround-view 3D Gaussian Splatting for Autonomous Parking
Jan 04, 2026Parking is a critical task for autonomous driving systems (ADS), with unique challenges in crowded parking slots and GPS-denied environments. However, existing works focus on 2D parking slot perception, mapping, and localization, 3D reconstruction remains underexplored, which is crucial for capturing complex spatial geometry in parking scenarios. Naively improving the visual quality of reconstructed parking scenes does not directly benefit autonomous parking, as the key entry point for parking is the slots perception module. To address these limitations, we curate the first benchmark named ParkRecon3D, specifically designed for parking scene reconstruction. It includes sensor data from four surround-view fisheye cameras with calibrated extrinsics and dense parking slot annotations. We then propose ParkGaussian, the first framework that integrates 3D Gaussian Splatting (3DGS) for parking scene reconstruction. To further improve the alignment between reconstruction and downstream parking slot detection, we introduce a slot-aware reconstruction strategy that leverages existing parking perception methods to enhance the synthesis quality of slot regions. Experiments on ParkRecon3D demonstrate that ParkGaussian achieves state-of-the-art reconstruction quality and better preserves perception consistency for downstream tasks. The code and dataset will be released at: https://github.com/wm-research/ParkGaussian
Salient Object Detection in Complex Weather Conditions via Noise Indicators
Dec 11, 2025Salient object detection (SOD), a foundational task in computer vision, has advanced from single-modal to multi-modal paradigms to enhance generalization. However, most existing SOD methods assume low-noise visual conditions, overlooking the degradation of segmentation accuracy caused by weather-induced noise in real-world scenarios. In this paper, we propose a SOD framework tailored for diverse weather conditions, encompassing a specific encoder and a replaceable decoder. To enable handling of varying weather noises, we introduce a one-hot vector as a noise indicator to represent different weather types and design a Noise Indicator Fusion Module (NIFM). The NIFM takes both semantic features and the noise indicator as dual inputs and is inserted between consecutive stages of the encoder to embed weather-aware priors via adaptive feature modulation. Critically, the proposed specific encoder retains compatibility with mainstream SOD decoders. Extensive experiments are conducted on the WXSOD dataset under varying training data scales (100%, 50%, 30% of the full training set), three encoder and seven decoder configurations. Results show that the proposed SOD framework (particularly the NIFM-enhanced specific encoder) improves segmentation accuracy under complex weather conditions compared to a vanilla encoder.
WXSOD: A Benchmark for Robust Salient Object Detection in Adverse Weather Conditions
Aug 17, 2025Salient object detection (SOD) in complex environments remains a challenging research topic. Most existing methods perform well in natural scenes with negligible noise, and tend to leverage multi-modal information (e.g., depth and infrared) to enhance accuracy. However, few studies are concerned with the damage of weather noise on SOD performance due to the lack of dataset with pixel-wise annotations. To bridge this gap, this paper introduces a novel Weather-eXtended Salient Object Detection (WXSOD) dataset. It consists of 14,945 RGB images with diverse weather noise, along with the corresponding ground truth annotations and weather labels. To verify algorithm generalization, WXSOD contains two test sets, i.e., a synthesized test set and a real test set. The former is generated by adding weather noise to clean images, while the latter contains real-world weather noise. Based on WXSOD, we propose an efficient baseline, termed Weather-aware Feature Aggregation Network (WFANet), which adopts a fully supervised two-branch architecture. Specifically, the weather prediction branch mines weather-related deep features, while the saliency detection branch fuses semantic features extracted from the backbone with weather features for SOD. Comprehensive comparisons against 17 SOD methods shows that our WFANet achieves superior performance on WXSOD. The code and benchmark results will be made publicly available at https://github.com/C-water/WXSOD
K-Buffers: A Plug-in Method for Enhancing Neural Fields with Multiple Buffers
May 26, 2025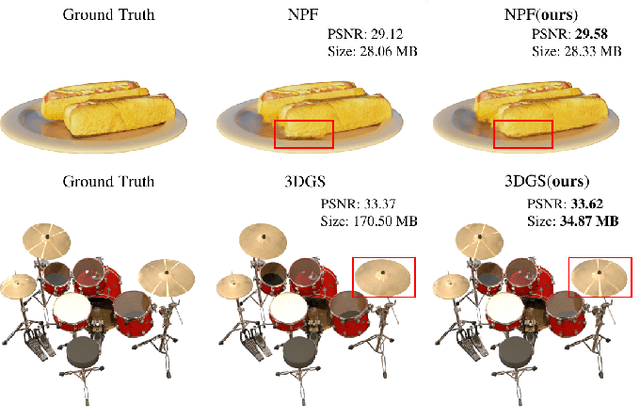
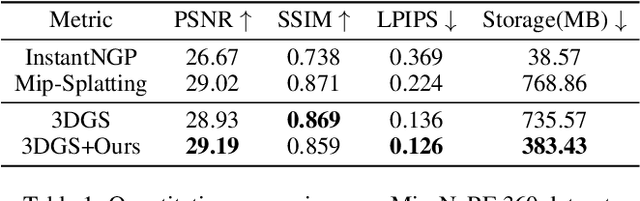
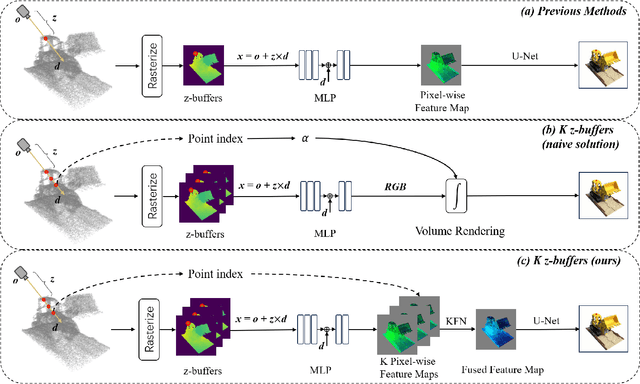
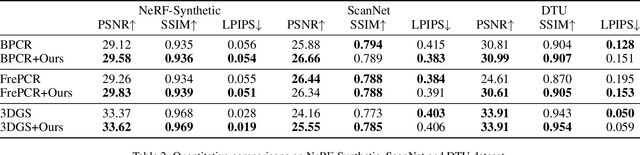
Neural fields are now the central focus of research in 3D vision and computer graphics. Existing methods mainly focus on various scene representations, such as neural points and 3D Gaussians. However, few works have studied the rendering process to enhance the neural fields. In this work, we propose a plug-in method named K-Buffers that leverages multiple buffers to improve the rendering performance. Our method first renders K buffers from scene representations and constructs K pixel-wise feature maps. Then, We introduce a K-Feature Fusion Network (KFN) to merge the K pixel-wise feature maps. Finally, we adopt a feature decoder to generate the rendering image. We also introduce an acceleration strategy to improve rendering speed and quality. We apply our method to well-known radiance field baselines, including neural point fields and 3D Gaussian Splatting (3DGS). Extensive experiments demonstrate that our method effectively enhances the rendering performance of neural point fields and 3DGS.
VGNC: Reducing the Overfitting of Sparse-view 3DGS via Validation-guided Gaussian Number Control
Apr 20, 2025Sparse-view 3D reconstruction is a fundamental yet challenging task in practical 3D reconstruction applications. Recently, many methods based on the 3D Gaussian Splatting (3DGS) framework have been proposed to address sparse-view 3D reconstruction. Although these methods have made considerable advancements, they still show significant issues with overfitting. To reduce the overfitting, we introduce VGNC, a novel Validation-guided Gaussian Number Control (VGNC) approach based on generative novel view synthesis (NVS) models. To the best of our knowledge, this is the first attempt to alleviate the overfitting issue of sparse-view 3DGS with generative validation images. Specifically, we first introduce a validation image generation method based on a generative NVS model. We then propose a Gaussian number control strategy that utilizes generated validation images to determine the optimal Gaussian numbers, thereby reducing the issue of overfitting. We conducted detailed experiments on various sparse-view 3DGS baselines and datasets to evaluate the effectiveness of VGNC. Extensive experiments show that our approach not only reduces overfitting but also improves rendering quality on the test set while decreasing the number of Gaussian points. This reduction lowers storage demands and accelerates both training and rendering. The code will be released.
Relative Distance Guided Dynamic Partition Learning for Scale-Invariant UAV-View Geo-Localization
Dec 23, 2024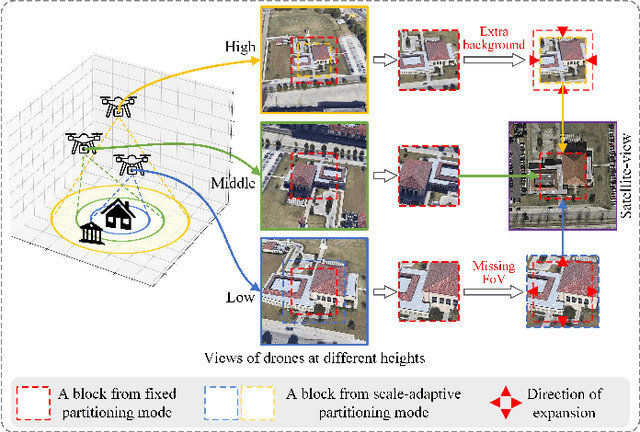
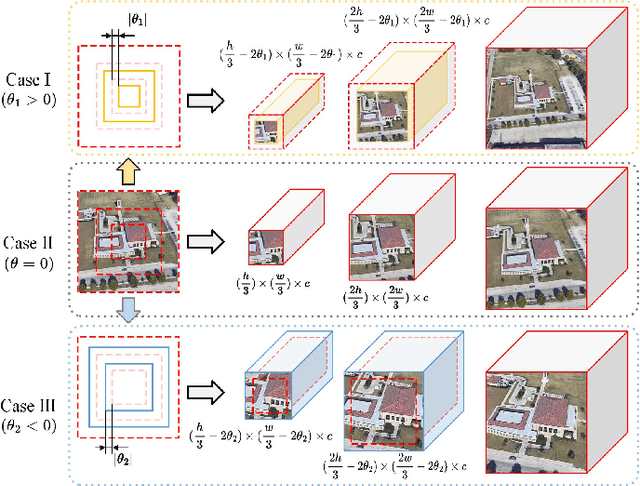
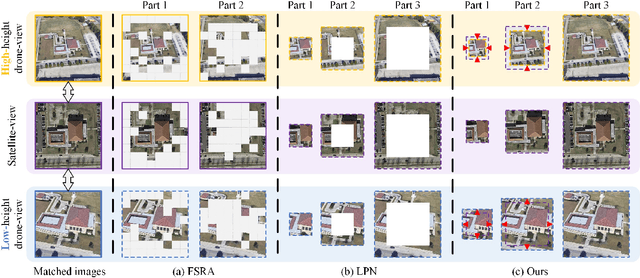
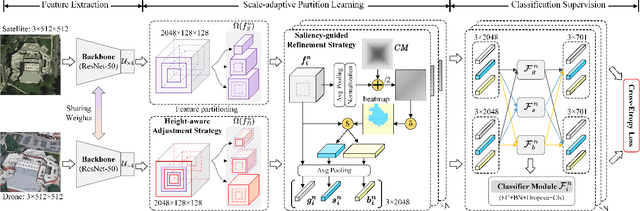
UAV-view Geo-Localization~(UVGL) presents substantial challenges, particularly due to the disparity in visual appearance between drone-captured imagery and satellite perspectives. Existing methods usually assume consistent scaling factor across different views. Therefore, they adopt predefined partition alignment and extract viewpoint-invariant representation by constructing a variety of part-level features. However, the scaling assumption is not always hold in the real-world scenarios that variations of UAV flight state leads to the scale mismatch of cross-views, resulting in serious performance degradation. To overcome this issue, we propose a partition learning framework based on relative distance, which alleviates the dependence on scale consistency while mining fine-grained features. Specifically, we propose a distance guided dynamic partition learning strategy~(DGDPL), consisting of a square partition strategy and a distance-guided adjustment strategy. The former is utilized to extract fine-grained features and global features in a simple manner. The latter calculates the relative distance ratio between drone- and satellite-view to adjust the partition size, thereby explicitly aligning the semantic information between partition pairs. Furthermore, we propose a saliency-guided refinement strategy to refine part-level features, so as to further improve the retrieval accuracy. Extensive experiments show that our approach achieves superior geo-localization accuracy across various scale-inconsistent scenarios, and exhibits remarkable robustness against scale variations. The code will be released.
Near Large Far Small: Relative Distance Based Partition Learning for UAV-view Geo-Localization
Dec 16, 2024UAV-view Geo-Localization (UVGL) presents substantial challenges, primarily due to appearance differences between drone-view and satellite-view. Existing methods develop partition learning strategies aimed at mining more comprehensive information by constructing diverse part-level feature representations, which rely on consistent cross-view scales. However, variations of UAV flight state leads to the scale mismatch of cross-views, resulting in serious performance degradation of partition-based methods. To overcome this issue, we propose a partition learning framework based on relative distance, which alleviates the dependence on scale consistency while mining fine-grained features. Specifically, we propose a distance guided dynamic partition learning strategy (DGDPL), consisting of a square partition strategy and a dynamic-guided adjustment strategy. The former is utilized to extract fine-grained features and global features in a simple manner. The latter calculates the relative distance ratio between drone- and satellite-view to adjust the partition size, thereby aligning the semantic information between partition pairs. Furthermore, we propose a saliency-guided refinement strategy to refine part-level features, so as to further improve the retrieval accuracy. Extensive experiments show that our approach achieves superior geo-localization accuracy across various scale-inconsistent scenarios, and exhibits remarkable robustness against scale variations. The code will be released.
ThermalGaussian: Thermal 3D Gaussian Splatting
Sep 11, 2024



Thermography is especially valuable for the military and other users of surveillance cameras. Some recent methods based on Neural Radiance Fields (NeRF) are proposed to reconstruct the thermal scenes in 3D from a set of thermal and RGB images. However, unlike NeRF, 3D Gaussian splatting (3DGS) prevails due to its rapid training and real-time rendering. In this work, we propose ThermalGaussian, the first thermal 3DGS approach capable of rendering high-quality images in RGB and thermal modalities. We first calibrate the RGB camera and the thermal camera to ensure that both modalities are accurately aligned. Subsequently, we use the registered images to learn the multimodal 3D Gaussians. To prevent the overfitting of any single modality, we introduce several multimodal regularization constraints. We also develop smoothing constraints tailored to the physical characteristics of the thermal modality. Besides, we contribute a real-world dataset named RGBT-Scenes, captured by a hand-hold thermal-infrared camera, facilitating future research on thermal scene reconstruction. We conduct comprehensive experiments to show that ThermalGaussian achieves photorealistic rendering of thermal images and improves the rendering quality of RGB images. With the proposed multimodal regularization constraints, we also reduced the model's storage cost by 90\%. The code and dataset will be released.
SDPL: Shifting-Dense Partition Learning for UAV-View Geo-Localization
Mar 07, 2024



Cross-view geo-localization aims to match images of the same target from different platforms, e.g., drone and satellite. It is a challenging task due to the changing both appearance of targets and environmental content from different views. Existing methods mainly focus on digging more comprehensive information through feature maps segmentation, while inevitably destroy the image structure and are sensitive to the shifting and scale of the target in the query. To address the above issues, we introduce a simple yet effective part-based representation learning, called shifting-dense partition learning (SDPL). Specifically, we propose the dense partition strategy (DPS), which divides the image into multiple parts to explore contextual-information while explicitly maintain the global structure. To handle scenarios with non-centered targets, we further propose the shifting-fusion strategy, which generates multiple sets of parts in parallel based on various segmentation centers and then adaptively fuses all features to select the best partitions. Extensive experiments show that our SDPL is robust to position shifting and scale variations, and achieves competitive performance on two prevailing benchmarks, i.e., University-1652 and SUES-200.