 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA modified RIME algorithm with covariance learning and diversity enhancement for numerical optimization
Sep 11, 2025Metaheuristics are widely applied for their ability to provide more efficient solutions. The RIME algorithm is a recently proposed physical-based metaheuristic algorithm with certain advantages. However, it suffers from rapid loss of population diversity during optimization and is prone to fall into local optima, leading to unbalanced exploitation and exploration. To address the shortcomings of RIME, this paper proposes a modified RIME with covariance learning and diversity enhancement (MRIME-CD). The algorithm applies three strategies to improve the optimization capability. First, a covariance learning strategy is introduced in the soft-rime search stage to increase the population diversity and balance the over-exploitation ability of RIME through the bootstrapping effect of dominant populations. Second, in order to moderate the tendency of RIME population to approach the optimal individual in the early search stage, an average bootstrapping strategy is introduced into the hard-rime puncture mechanism, which guides the population search through the weighted position of the dominant populations, thus enhancing the global search ability of RIME in the early stage. Finally, a new stagnation indicator is proposed, and a stochastic covariance learning strategy is used to update the stagnant individuals in the population when the algorithm gets stagnant, thus enhancing the ability to jump out of the local optimal solution. The proposed MRIME-CD algorithm is subjected to a series of validations on the CEC2017 test set, the CEC2022 test set, and the experimental results are analyzed using the Friedman test, the Wilcoxon rank sum test, and the Kruskal Wallis test. The results show that MRIME-CD can effectively improve the performance of basic RIME and has obvious superiorities in terms of solution accuracy, convergence speed and stability.
* This is the author's preprint of the article published in Cluster Computing (Springer): Shi, S., Zhang, L., Yin, Y. et al. A modified RIME algorithm with covariance learning and diversity enhancement for numerical optimization. Cluster Comput 28, 658 (2025). The final authenticated version is available online at SpringerLink
An improved educational competition optimizer with multi-covariance learning operators for global optimization problems
Sep 11, 2025The educational competition optimizer is a recently introduced metaheuristic algorithm inspired by human behavior, originating from the dynamics of educational competition within society. Nonetheless, ECO faces constraints due to an imbalance between exploitation and exploration, rendering it susceptible to local optima and demonstrating restricted effectiveness in addressing complex optimization problems. To address these limitations, this study presents an enhanced educational competition optimizer (IECO-MCO) utilizing multi-covariance learning operators. In IECO, three distinct covariance learning operators are introduced to improve the performance of ECO. Each operator effectively balances exploitation and exploration while preventing premature convergence of the population. The effectiveness of IECO is assessed through benchmark functions derived from the CEC 2017 and CEC 2022 test suites, and its performance is compared with various basic and improved algorithms across different categories. The results demonstrate that IECO-MCO surpasses the basic ECO and other competing algorithms in convergence speed, stability, and the capability to avoid local optima. Furthermore, statistical analyses, including the Friedman test, Kruskal-Wallis test, and Wilcoxon rank-sum test, are conducted to validate the superiority of IECO-MCO over the compared algorithms. Compared with the basic algorithm (improved algorithm), IECO-MCO achieved an average ranking of 2.213 (2.488) on the CE2017 and CEC2022 test suites. Additionally, the practical applicability of the proposed IECO-MCO algorithm is verified by solving constrained optimization problems. The experimental outcomes demonstrate the superior performance of IECO-MCO in tackling intricate optimization problems, underscoring its robustness and practical effectiveness in real-world scenarios.
WXSOD: A Benchmark for Robust Salient Object Detection in Adverse Weather Conditions
Aug 17, 2025Salient object detection (SOD) in complex environments remains a challenging research topic. Most existing methods perform well in natural scenes with negligible noise, and tend to leverage multi-modal information (e.g., depth and infrared) to enhance accuracy. However, few studies are concerned with the damage of weather noise on SOD performance due to the lack of dataset with pixel-wise annotations. To bridge this gap, this paper introduces a novel Weather-eXtended Salient Object Detection (WXSOD) dataset. It consists of 14,945 RGB images with diverse weather noise, along with the corresponding ground truth annotations and weather labels. To verify algorithm generalization, WXSOD contains two test sets, i.e., a synthesized test set and a real test set. The former is generated by adding weather noise to clean images, while the latter contains real-world weather noise. Based on WXSOD, we propose an efficient baseline, termed Weather-aware Feature Aggregation Network (WFANet), which adopts a fully supervised two-branch architecture. Specifically, the weather prediction branch mines weather-related deep features, while the saliency detection branch fuses semantic features extracted from the backbone with weather features for SOD. Comprehensive comparisons against 17 SOD methods shows that our WFANet achieves superior performance on WXSOD. The code and benchmark results will be made publicly available at https://github.com/C-water/WXSOD
Memory-updated-based Framework for 100% Reliable Flexible Flat Cables Insertion
Feb 18, 2025Automatic assembly lines have increasingly replaced human labor in various tasks; however, the automation of Flexible Flat Cable (FFC) insertion remains unrealized due to its high requirement for effective feedback and dynamic operation, limiting approximately 11% of global industrial capacity. Despite lots of approaches, like vision-based tactile sensors and reinforcement learning, having been proposed, the implementation of human-like high-reliable insertion (i.e., with a 100% success rate in completed insertion) remains a big challenge. Drawing inspiration from human behavior in FFC insertion, which involves sensing three-dimensional forces, translating them into physical concepts, and continuously improving estimates, we propose a novel framework. This framework includes a sensing module for collecting three-dimensional tactile data, a perception module for interpreting this data into meaningful physical signals, and a memory module based on Bayesian theory for reliability estimation and control. This strategy enables the robot to accurately assess its physical state and generate reliable status estimations and corrective actions. Experimental results demonstrate that the robot using this framework can detect alignment errors of 0.5 mm with an accuracy of 97.92% and then achieve a 100% success rate in all completed tests after a few iterations. This work addresses the challenges of unreliable perception and control in complex insertion tasks, highlighting the path toward the development of fully automated production lines.
Real-time Multi-view Omnidirectional Depth Estimation System for Robots and Autonomous Driving on Real Scenes
Sep 12, 2024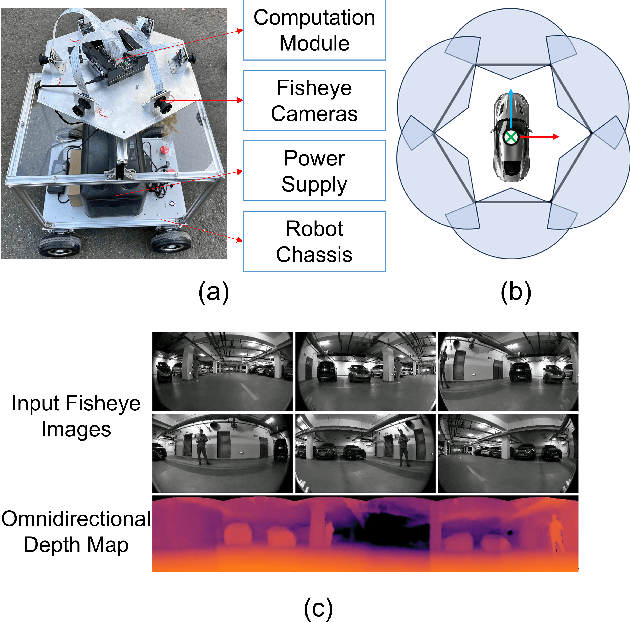

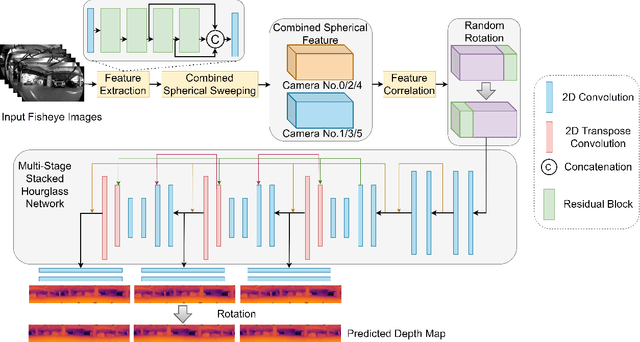
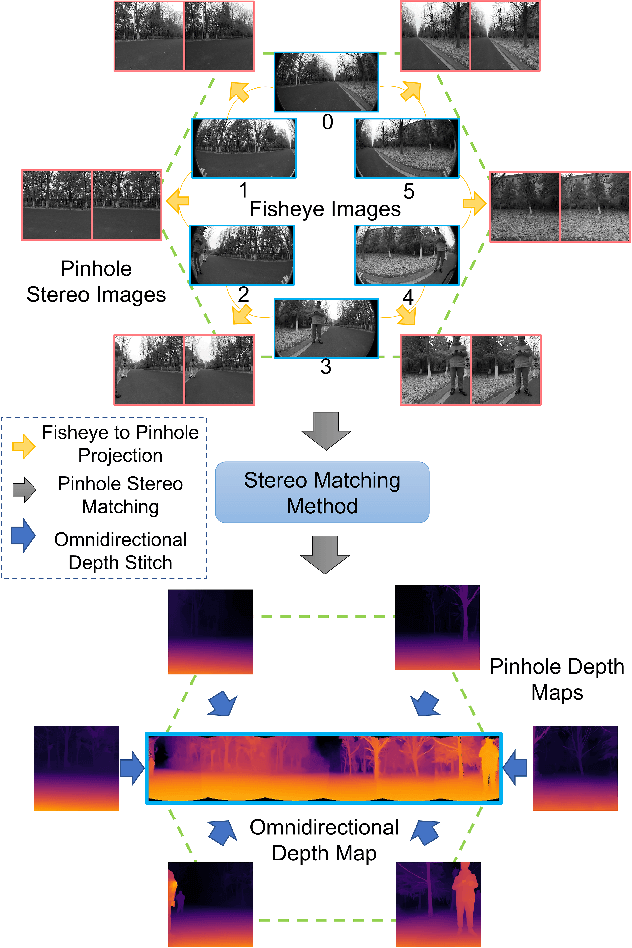
Omnidirectional Depth Estimation has broad application prospects in fields such as robotic navigation and autonomous driving. In this paper, we propose a robotic prototype system and corresponding algorithm designed to validate omnidirectional depth estimation for navigation and obstacle avoidance in real-world scenarios for both robots and vehicles. The proposed HexaMODE system captures 360$^\circ$ depth maps using six surrounding arranged fisheye cameras. We introduce a combined spherical sweeping method and optimize the model architecture for proposed RtHexa-OmniMVS algorithm to achieve real-time omnidirectional depth estimation. To ensure high accuracy, robustness, and generalization in real-world environments, we employ a teacher-student self-training strategy, utilizing large-scale unlabeled real-world data for model training. The proposed algorithm demonstrates high accuracy in various complex real-world scenarios, both indoors and outdoors, achieving an inference speed of 15 fps on edge computing platforms.
F3T: A soft tactile unit with 3D force and temperature mathematical decoupling ability for robots
Sep 05, 2024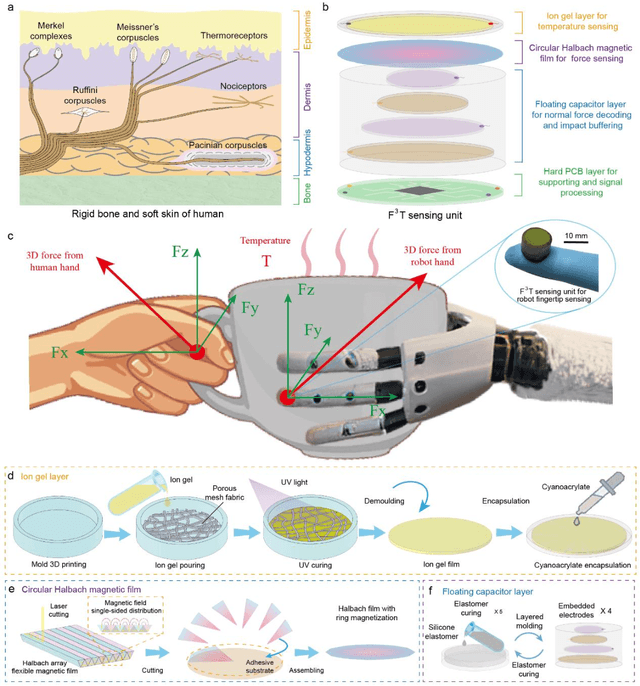
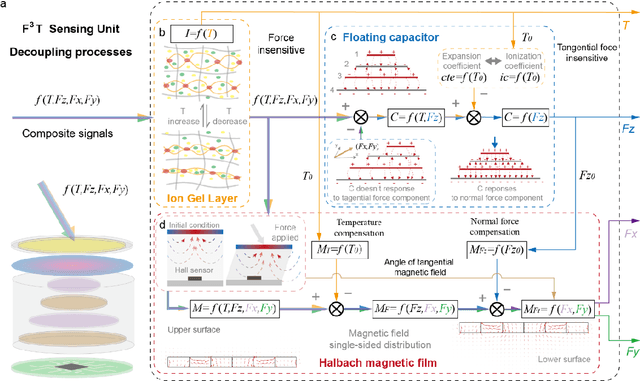
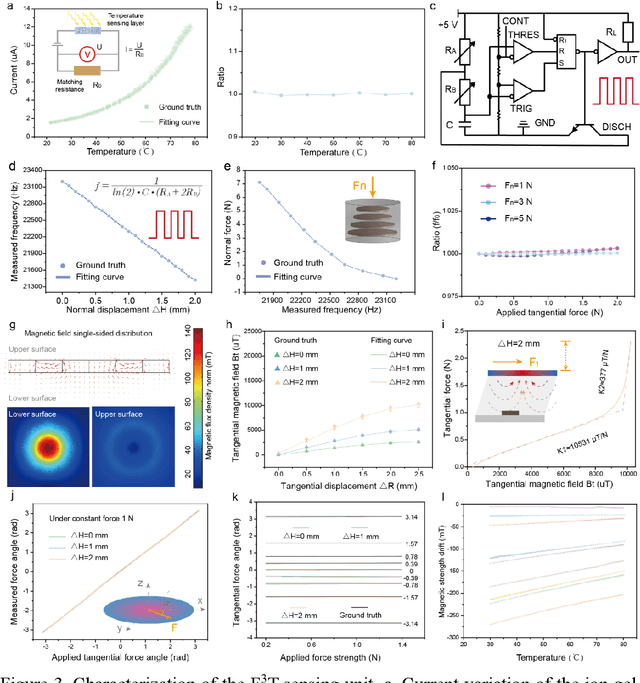
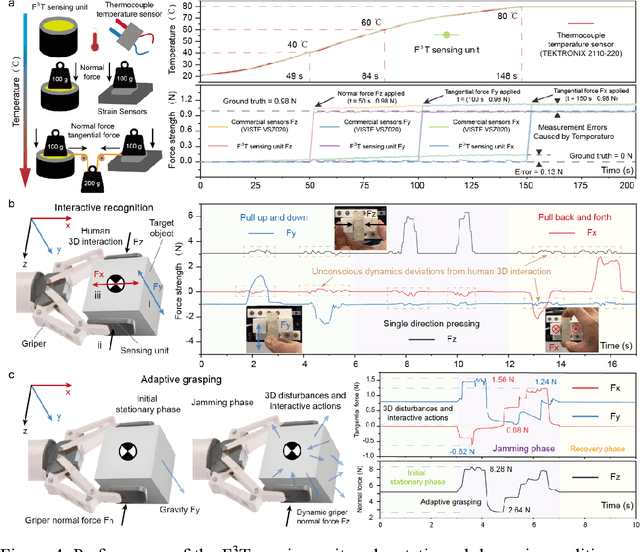
The human skin exhibits remarkable capability to perceive contact forces and environmental temperatures, providing intricate information essential for nuanced manipulation. Despite recent advancements in soft tactile sensors, a significant challenge remains in accurately decoupling signals - specifically, separating force from directional orientation and temperature - resulting in fail to meet the advanced application requirements of robots. This research proposes a multi-layered soft sensor unit (F3T) designed to achieve isolated measurements and mathematical decoupling of normal pressure, omnidirectional tangential forces, and temperature. We developed a circular coaxial magnetic film featuring a floating-mountain multi-layer capacitor, facilitating the physical decoupling of normal and tangential forces in all directions. Additionally, we incorporated an ion gel-based temperature sensing film atop the tactile sensor. This sensor is resilient to external pressure and deformation, enabling it to measure temperature and, crucially, eliminate capacitor errors induced by environmental temperature changes. This innovative design allows for the decoupled measurement of multiple signals, paving the way for advancements in higher-level robot motion control, autonomous decision-making, and task planning.