 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Multi-view Omnidirectional Depth Estimation System for Robots and Autonomous Driving on Real Scenes
Sep 12, 2024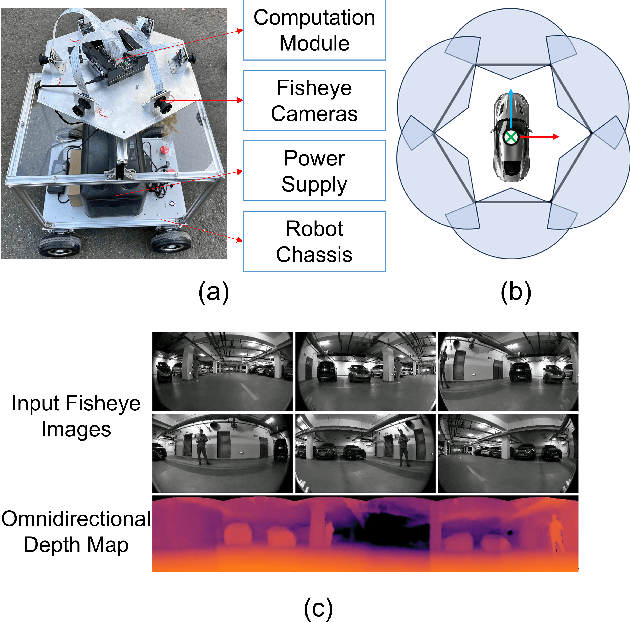

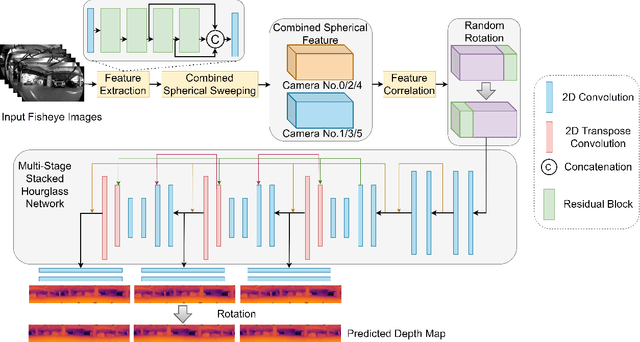
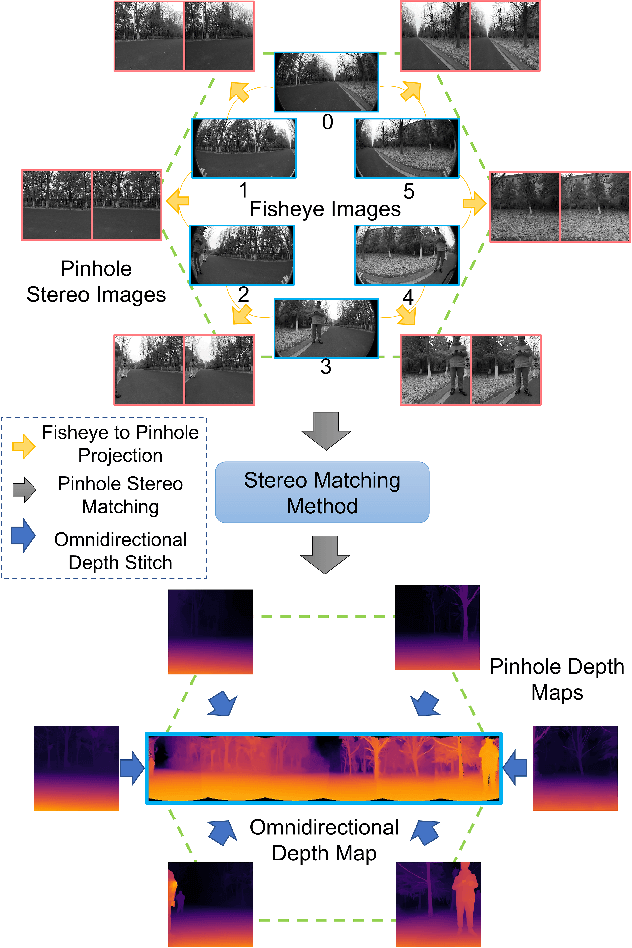
Omnidirectional Depth Estimation has broad application prospects in fields such as robotic navigation and autonomous driving. In this paper, we propose a robotic prototype system and corresponding algorithm designed to validate omnidirectional depth estimation for navigation and obstacle avoidance in real-world scenarios for both robots and vehicles. The proposed HexaMODE system captures 360$^\circ$ depth maps using six surrounding arranged fisheye cameras. We introduce a combined spherical sweeping method and optimize the model architecture for proposed RtHexa-OmniMVS algorithm to achieve real-time omnidirectional depth estimation. To ensure high accuracy, robustness, and generalization in real-world environments, we employ a teacher-student self-training strategy, utilizing large-scale unlabeled real-world data for model training. The proposed algorithm demonstrates high accuracy in various complex real-world scenarios, both indoors and outdoors, achieving an inference speed of 15 fps on edge computing platforms.