 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRISM: Parallel Residual Iterative Sequence Model
Feb 12, 2026Generative sequence modeling faces a fundamental tension between the expressivity of Transformers and the efficiency of linear sequence models. Existing efficient architectures are theoretically bounded by shallow, single-step linear updates, while powerful iterative methods like Test-Time Training (TTT) break hardware parallelism due to state-dependent gradients. We propose PRISM (Parallel Residual Iterative Sequence Model) to resolve this tension. PRISM introduces a solver-inspired inductive bias that captures key structural properties of multi-step refinement in a parallelizable form. We employ a Write-Forget Decoupling strategy that isolates non-linearity within the injection operator. To bypass the serial dependency of explicit solvers, PRISM utilizes a two-stage proxy architecture: a short-convolution anchors the initial residual using local history energy, while a learned predictor estimates the refinement updates directly from the input. This design distills structural patterns associated with iterative correction into a parallelizable feedforward operator. Theoretically, we prove that this formulation achieves Rank-$L$ accumulation, structurally expanding the update manifold beyond the single-step Rank-$1$ bottleneck. Empirically, it achieves comparable performance to explicit optimization methods while achieving 174x higher throughput.
Robust Single-shot Structured Light 3D Imaging via Neural Feature Decoding
Dec 16, 2025We consider the problem of active 3D imaging using single-shot structured light systems, which are widely employed in commercial 3D sensing devices such as Apple Face ID and Intel RealSense. Traditional structured light methods typically decode depth correspondences through pixel-domain matching algorithms, resulting in limited robustness under challenging scenarios like occlusions, fine-structured details, and non-Lambertian surfaces. Inspired by recent advances in neural feature matching, we propose a learning-based structured light decoding framework that performs robust correspondence matching within feature space rather than the fragile pixel domain. Our method extracts neural features from the projected patterns and captured infrared (IR) images, explicitly incorporating their geometric priors by building cost volumes in feature space, achieving substantial performance improvements over pixel-domain decoding approaches. To further enhance depth quality, we introduce a depth refinement module that leverages strong priors from large-scale monocular depth estimation models, improving fine detail recovery and global structural coherence. To facilitate effective learning, we develop a physically-based structured light rendering pipeline, generating nearly one million synthetic pattern-image pairs with diverse objects and materials for indoor settings. Experiments demonstrate that our method, trained exclusively on synthetic data with multiple structured light patterns, generalizes well to real-world indoor environments, effectively processes various pattern types without retraining, and consistently outperforms both commercial structured light systems and passive stereo RGB-based depth estimation methods. Project page: https://namisntimpot.github.io/NSLweb/.
Zero-shot Load Forecasting for Integrated Energy Systems: A Large Language Model-based Framework with Multi-task Learning
Feb 24, 2025The growing penetration of renewable energy sources in power systems has increased the complexity and uncertainty of load forecasting, especially for integrated energy systems with multiple energy carriers. Traditional forecasting methods heavily rely on historical data and exhibit limited transferability across different scenarios, posing significant challenges for emerging applications in smart grids and energy internet. This paper proposes the TSLLM-Load Forecasting Mechanism, a novel zero-shot load forecasting framework based on large language models (LLMs) to address these challenges. The framework consists of three key components: a data preprocessing module that handles multi-source energy load data, a time series prompt generation module that bridges the semantic gap between energy data and LLMs through multi-task learning and similarity alignment, and a prediction module that leverages pre-trained LLMs for accurate forecasting. The framework's effectiveness was validated on a real-world dataset comprising load profiles from 20 Australian solar-powered households, demonstrating superior performance in both conventional and zero-shot scenarios. In conventional testing, our method achieved a Mean Squared Error (MSE) of 0.4163 and a Mean Absolute Error (MAE) of 0.3760, outperforming existing approaches by at least 8\%. In zero-shot prediction experiments across 19 households, the framework maintained consistent accuracy with a total MSE of 11.2712 and MAE of 7.6709, showing at least 12\% improvement over current methods. The results validate the framework's potential for accurate and transferable load forecasting in integrated energy systems, particularly beneficial for renewable energy integration and smart grid applications.
Gradient Based Method for the Fusion of Lattice Quantizers
Feb 09, 2025
In practical applications, lattice quantizers leverage discrete lattice points to approximate arbitrary points in the lattice. An effective lattice quantizer significantly enhances both the accuracy and efficiency of these approximations. In the context of high-dimensional lattice quantization, previous work proposed utilizing low-dimensional optimal lattice quantizers and addressed the challenge of determining the optimal length ratio in orthogonal splicing. Notably, it was demonstrated that fixed length ratios and orthogonality yield suboptimal results when combining low-dimensional lattices. Building on this foundation, another approach employed gradient descent to identify optimal lattices, which inspired us to explore the use of neural networks to discover matrices that outperform those obtained from orthogonal splicing methods. We propose two novel approaches to tackle this problem: the Household Algorithm and the Matrix Exp Algorithm. Our results indicate that both the Household Algorithm and the Matrix Exp Algorithm achieve improvements in lattice quantizers across dimensions 13, 15, 17 to 19, 21, and 22. Moreover, the Matrix Exp Algorithm demonstrates superior efficacy in high-dimensional settings.
Real-time Multi-view Omnidirectional Depth Estimation System for Robots and Autonomous Driving on Real Scenes
Sep 12, 2024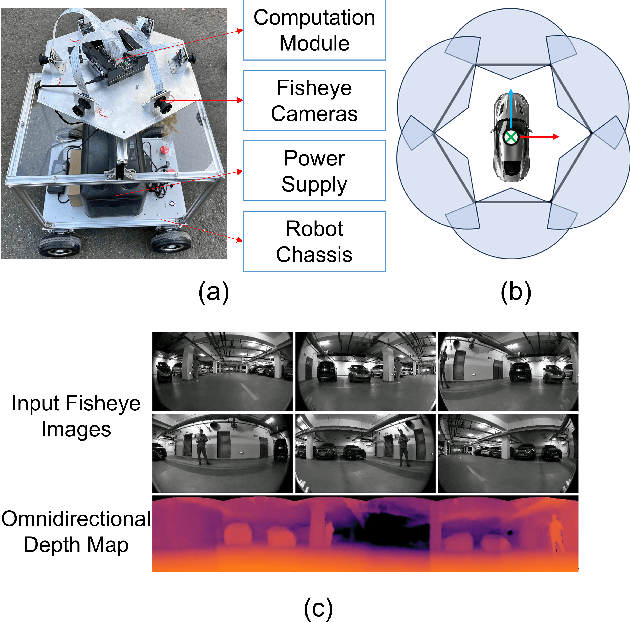

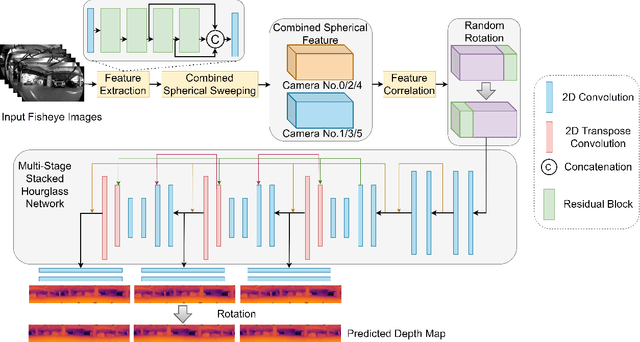
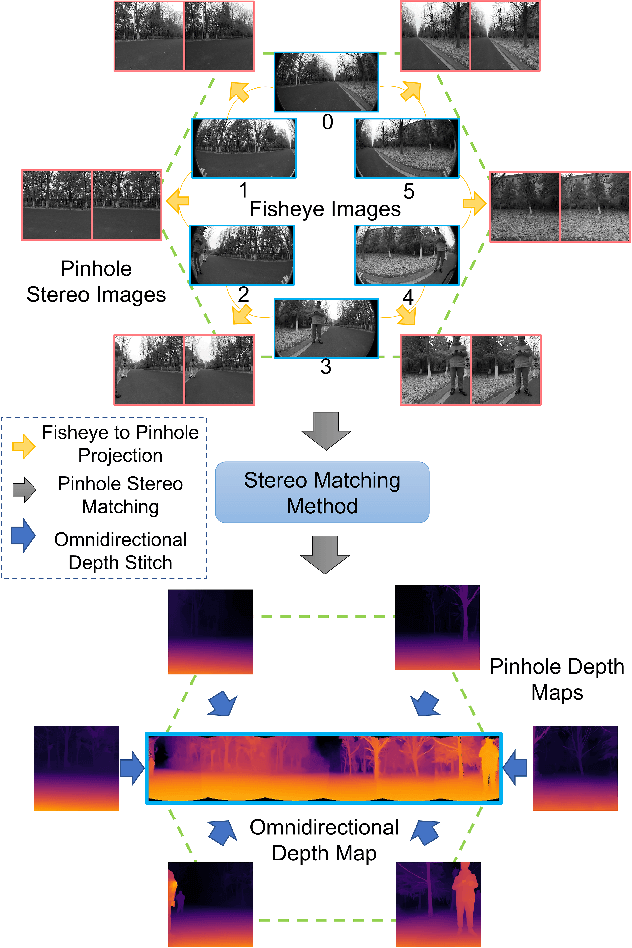
Omnidirectional Depth Estimation has broad application prospects in fields such as robotic navigation and autonomous driving. In this paper, we propose a robotic prototype system and corresponding algorithm designed to validate omnidirectional depth estimation for navigation and obstacle avoidance in real-world scenarios for both robots and vehicles. The proposed HexaMODE system captures 360$^\circ$ depth maps using six surrounding arranged fisheye cameras. We introduce a combined spherical sweeping method and optimize the model architecture for proposed RtHexa-OmniMVS algorithm to achieve real-time omnidirectional depth estimation. To ensure high accuracy, robustness, and generalization in real-world environments, we employ a teacher-student self-training strategy, utilizing large-scale unlabeled real-world data for model training. The proposed algorithm demonstrates high accuracy in various complex real-world scenarios, both indoors and outdoors, achieving an inference speed of 15 fps on edge computing platforms.