 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndex-ASR Technical Report
Dec 31, 2025Automatic speech recognition (ASR) has witnessed remarkable progress in recent years, largely driven by the emergence of LLM-based ASR paradigm. Despite their strong performance on a variety of open-source benchmarks, existing LLM-based ASR systems still suffer from two critical limitations. First, they are prone to hallucination errors, often generating excessively long and repetitive outputs that are not well grounded in the acoustic input. Second, they provide limited support for flexible and fine-grained contextual customization. To address these challenges, we propose Index-ASR, a large-scale LLM-based ASR system designed to simultaneously enhance robustness and support customizable hotword recognition. The core idea of Index-ASR lies in the integration of LLM and large-scale training data enriched with background noise and contextual information. Experimental results show that our Index-ASR achieves strong performance on both open-source benchmarks and in-house test sets, highlighting its robustness and practicality for real-world ASR applications.
MolAct: An Agentic RL Framework for Molecular Editing and Property Optimization
Dec 24, 2025Molecular editing and optimization are multi-step problems that require iteratively improving properties while keeping molecules chemically valid and structurally similar. We frame both tasks as sequential, tool-guided decisions and introduce MolAct, an agentic reinforcement learning framework that employs a two-stage training paradigm: first building editing capability, then optimizing properties while reusing the learned editing behaviors. To the best of our knowledge, this is the first work to formalize molecular design as an Agentic Reinforcement Learning problem, where an LLM agent learns to interleave reasoning, tool-use, and molecular optimization. The framework enables agents to interact in multiple turns, invoking chemical tools for validity checking, property assessment, and similarity control, and leverages their feedback to refine subsequent edits. We instantiate the MolAct framework to train two model families: MolEditAgent for molecular editing tasks and MolOptAgent for molecular optimization tasks. In molecular editing, MolEditAgent-7B delivers 100, 95, and 98 valid add, delete, and substitute edits, outperforming strong closed "thinking" baselines such as DeepSeek-R1; MolEditAgent-3B approaches the performance of much larger open "thinking" models like Qwen3-32B-think. In molecular optimization, MolOptAgent-7B (trained on MolEditAgent-7B) surpasses the best closed "thinking" baseline (e.g., Claude 3.7) on LogP and remains competitive on solubility, while maintaining balanced performance across other objectives. These results highlight that treating molecular design as a multi-step, tool-augmented process is key to reliable and interpretable improvements.
TA-VLA: Elucidating the Design Space of Torque-aware Vision-Language-Action Models
Sep 09, 2025Many robotic manipulation tasks require sensing and responding to force signals such as torque to assess whether the task has been successfully completed and to enable closed-loop control. However, current Vision-Language-Action (VLA) models lack the ability to integrate such subtle physical feedback. In this work, we explore Torque-aware VLA models, aiming to bridge this gap by systematically studying the design space for incorporating torque signals into existing VLA architectures. We identify and evaluate several strategies, leading to three key findings. First, introducing torque adapters into the decoder consistently outperforms inserting them into the encoder.Third, inspired by joint prediction and planning paradigms in autonomous driving, we propose predicting torque as an auxiliary output, which further improves performance. This strategy encourages the model to build a physically grounded internal representation of interaction dynamics. Extensive quantitative and qualitative experiments across contact-rich manipulation benchmarks validate our findings.
Reasoning BO: Enhancing Bayesian Optimization with Long-Context Reasoning Power of LLMs
May 19, 2025Many real-world scientific and industrial applications require the optimization of expensive black-box functions. Bayesian Optimization (BO) provides an effective framework for such problems. However, traditional BO methods are prone to get trapped in local optima and often lack interpretable insights. To address this issue, this paper designs Reasoning BO, a novel framework that leverages reasoning models to guide the sampling process in BO while incorporating multi-agent systems and knowledge graphs for online knowledge accumulation. By integrating the reasoning and contextual understanding capabilities of Large Language Models (LLMs), we can provide strong guidance to enhance the BO process. As the optimization progresses, Reasoning BO provides real-time sampling recommendations along with critical insights grounded in plausible scientific theories, aiding in the discovery of superior solutions within the search space. We systematically evaluate our approach across 10 diverse tasks encompassing synthetic mathematical functions and complex real-world applications. The framework demonstrates its capability to progressively refine sampling strategies through real-time insights and hypothesis evolution, effectively identifying higher-performing regions of the search space for focused exploration. This process highlights the powerful reasoning and context-learning abilities of LLMs in optimization scenarios. For example, in the Direct Arylation task, our method increased the yield to 60.7%, whereas traditional BO achieved only a 25.2% yield. Furthermore, our investigation reveals that smaller LLMs, when fine-tuned through reinforcement learning, can attain comparable performance to their larger counterparts. This enhanced reasoning capability paves the way for more efficient automated scientific experimentation while maintaining computational feasibility.
Dynamic Legged Ball Manipulation on Rugged Terrains with Hierarchical Reinforcement Learning
Apr 21, 2025Advancing the dynamic loco-manipulation capabilities of quadruped robots in complex terrains is crucial for performing diverse tasks. Specifically, dynamic ball manipulation in rugged environments presents two key challenges. The first is coordinating distinct motion modalities to integrate terrain traversal and ball control seamlessly. The second is overcoming sparse rewards in end-to-end deep reinforcement learning, which impedes efficient policy convergence. To address these challenges, we propose a hierarchical reinforcement learning framework. A high-level policy, informed by proprioceptive data and ball position, adaptively switches between pre-trained low-level skills such as ball dribbling and rough terrain navigation. We further propose Dynamic Skill-Focused Policy Optimization to suppress gradients from inactive skills and enhance critical skill learning. Both simulation and real-world experiments validate that our methods outperform baseline approaches in dynamic ball manipulation across rugged terrains, highlighting its effectiveness in challenging environments. Videos are on our website: dribble-hrl.github.io.
DynamicGSG: Dynamic 3D Gaussian Scene Graphs for Environment Adaptation
Feb 21, 2025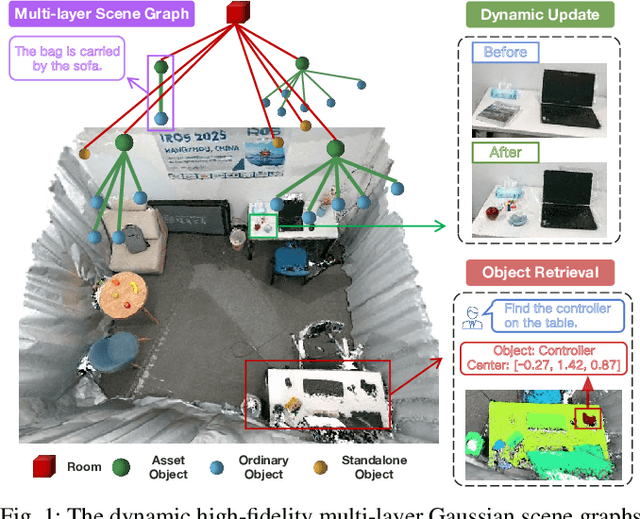
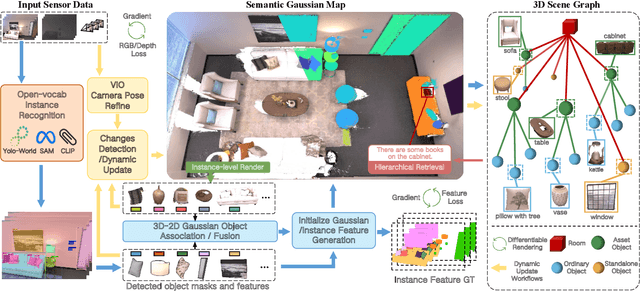
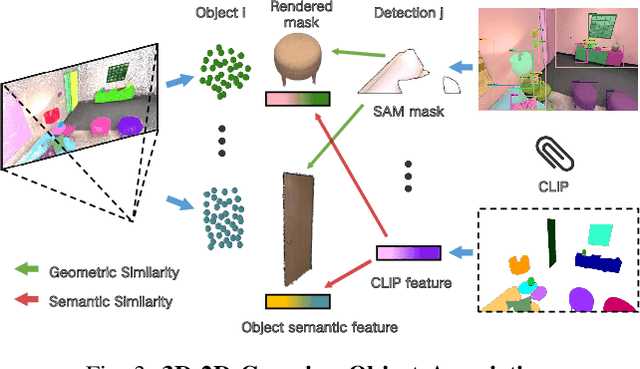
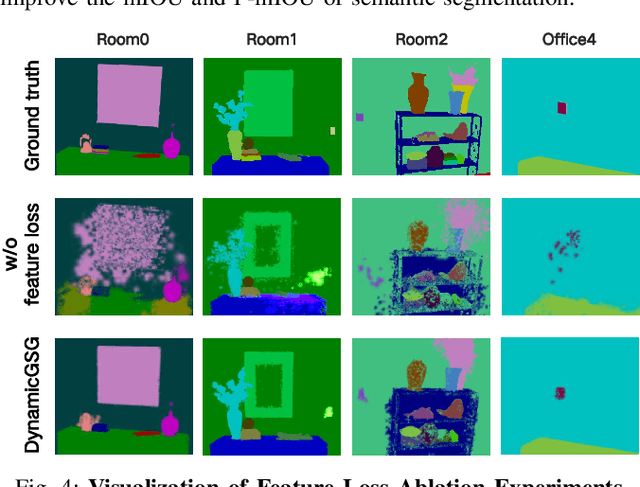
In real-world scenarios, the environment changes caused by agents or human activities make it extremely challenging for robots to perform various long-term tasks. To effectively understand and adapt to dynamic environments, the perception system of a robot needs to extract instance-level semantic information, reconstruct the environment in a fine-grained manner, and update its environment representation in memory according to environment changes. To address these challenges, We propose \textbf{DynamicGSG}, a dynamic, high-fidelity, open-vocabulary scene graph generation system leveraging Gaussian splatting. Our system comprises three key components: (1) constructing hierarchical scene graphs using advanced vision foundation models to represent the spatial and semantic relationships of objects in the environment, (2) designing a joint feature loss to optimize the Gaussian map for incremental high-fidelity reconstruction, and (3) updating the Gaussian map and scene graph according to real environment changes for long-term environment adaptation. Experiments and ablation studies demonstrate the performance and efficacy of the proposed method in terms of semantic segmentation, language-guided object retrieval, and reconstruction quality. Furthermore, we have validated the dynamic updating capabilities of our system in real laboratory environments. The source code will be released at:~\href{https://github.com/GeLuzhou/Dynamic-GSG}{https://github.com/GeLuzhou/DynamicGSG}.
Rip-NeRF: Anti-aliasing Radiance Fields with Ripmap-Encoded Platonic Solids
May 03, 2024



Despite significant advancements in Neural Radiance Fields (NeRFs), the renderings may still suffer from aliasing and blurring artifacts, since it remains a fundamental challenge to effectively and efficiently characterize anisotropic areas induced by the cone-casting procedure. This paper introduces a Ripmap-Encoded Platonic Solid representation to precisely and efficiently featurize 3D anisotropic areas, achieving high-fidelity anti-aliasing renderings. Central to our approach are two key components: Platonic Solid Projection and Ripmap encoding. The Platonic Solid Projection factorizes the 3D space onto the unparalleled faces of a certain Platonic solid, such that the anisotropic 3D areas can be projected onto planes with distinguishable characterization. Meanwhile, each face of the Platonic solid is encoded by the Ripmap encoding, which is constructed by anisotropically pre-filtering a learnable feature grid, to enable featurzing the projected anisotropic areas both precisely and efficiently by the anisotropic area-sampling. Extensive experiments on both well-established synthetic datasets and a newly captured real-world dataset demonstrate that our Rip-NeRF attains state-of-the-art rendering quality, particularly excelling in the fine details of repetitive structures and textures, while maintaining relatively swift training times.
A geometry-aware deep network for depth estimation in monocular endoscopy
Apr 20, 2023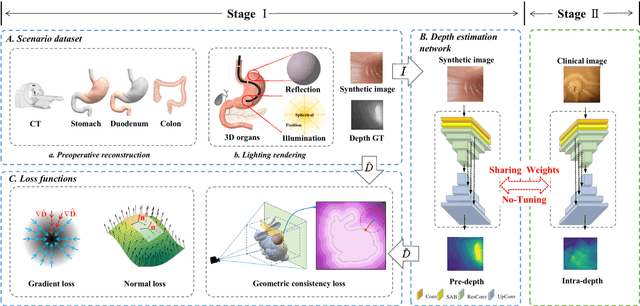
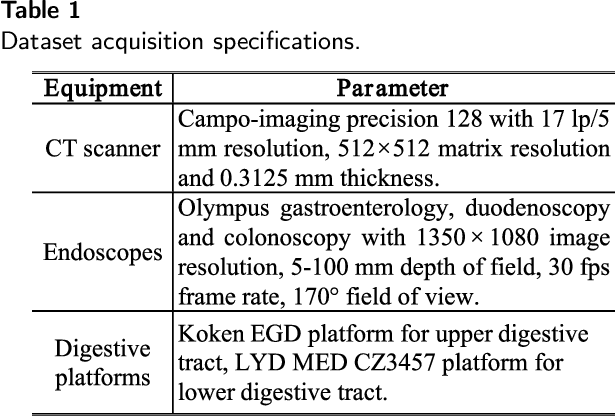
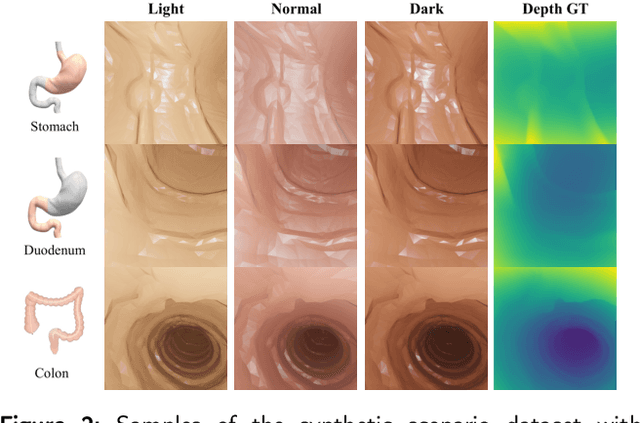
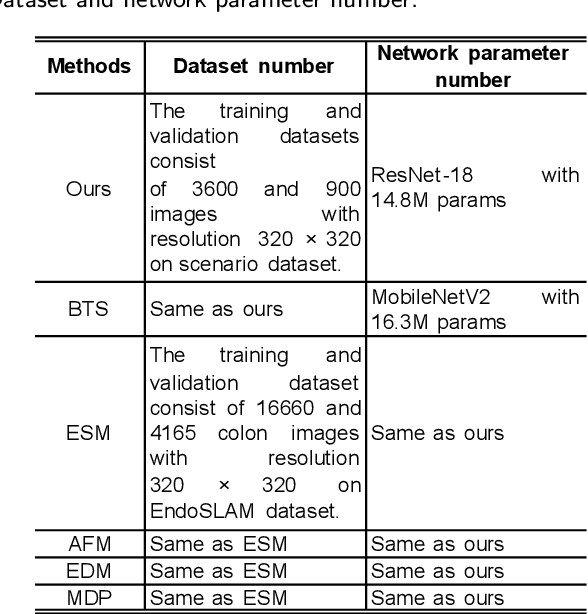
Monocular depth estimation is critical for endoscopists to perform spatial perception and 3D navigation of surgical sites. However, most of the existing methods ignore the important geometric structural consistency, which inevitably leads to performance degradation and distortion of 3D reconstruction. To address this issue, we introduce a gradient loss to penalize edge fluctuations ambiguous around stepped edge structures and a normal loss to explicitly express the sensitivity to frequently small structures, and propose a geometric consistency loss to spreads the spatial information across the sample grids to constrain the global geometric anatomy structures. In addition, we develop a synthetic RGB-Depth dataset that captures the anatomical structures under reflections and illumination variations. The proposed method is extensively validated across different datasets and clinical images and achieves mean RMSE values of 0.066 (stomach), 0.029 (small intestine), and 0.139 (colon) on the EndoSLAM dataset. The generalizability of the proposed method achieves mean RMSE values of 12.604 (T1-L1), 9.930 (T2-L2), and 13.893 (T3-L3) on the ColonDepth dataset. The experimental results show that our method exceeds previous state-of-the-art competitors and generates more consistent depth maps and reasonable anatomical structures. The quality of intraoperative 3D structure perception from endoscopic videos of the proposed method meets the accuracy requirements of video-CT registration algorithms for endoscopic navigation. The dataset and the source code will be available at https://github.com/YYM-SIA/LINGMI-MR.
Attack Transferability Characterization for Adversarially Robust Multi-label Classification
Jun 29, 2021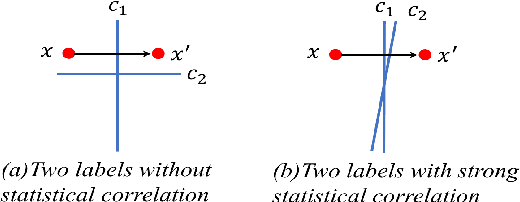

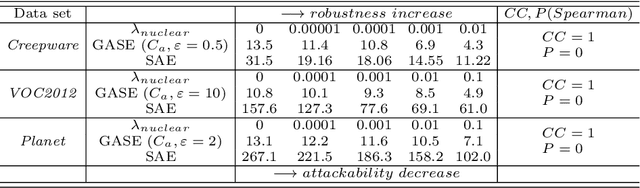

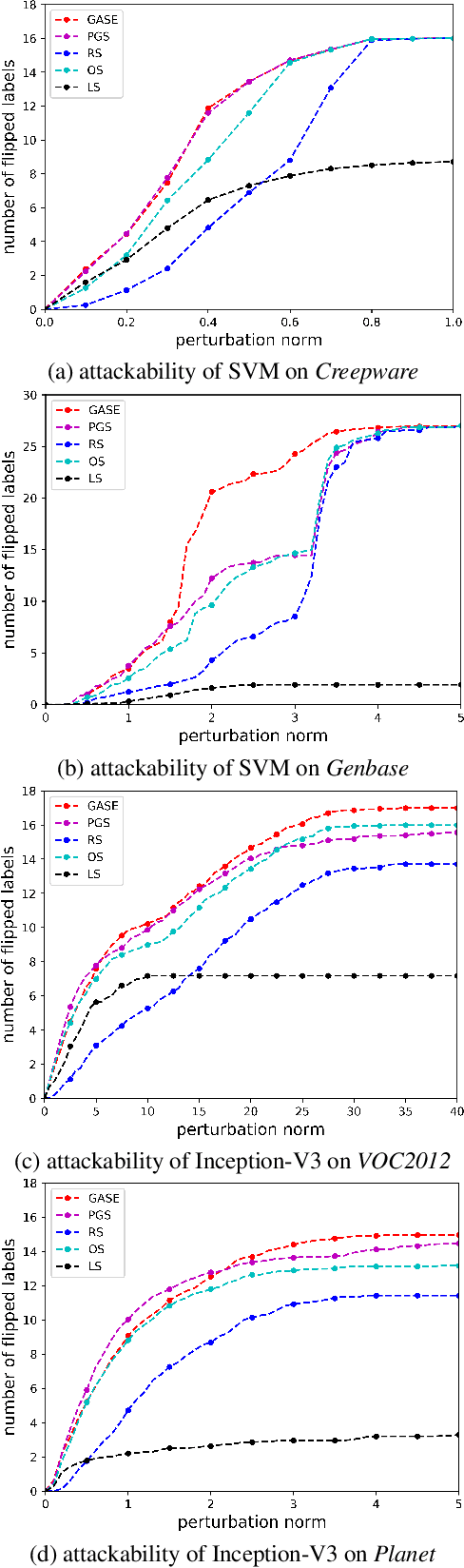
Despite of the pervasive existence of multi-label evasion attack, it is an open yet essential problem to characterize the origin of the adversarial vulnerability of a multi-label learning system and assess its attackability. In this study, we focus on non-targeted evasion attack against multi-label classifiers. The goal of the threat is to cause miss-classification with respect to as many labels as possible, with the same input perturbation. Our work gains in-depth understanding about the multi-label adversarial attack by first characterizing the transferability of the attack based on the functional properties of the multi-label classifier. We unveil how the transferability level of the attack determines the attackability of the classifier via establishing an information-theoretic analysis of the adversarial risk. Furthermore, we propose a transferability-centered attackability assessment, named Soft Attackability Estimator (SAE), to evaluate the intrinsic vulnerability level of the targeted multi-label classifier. This estimator is then integrated as a transferability-tuning regularization term into the multi-label learning paradigm to achieve adversarially robust classification. The experimental study on real-world data echos the theoretical analysis and verify the validity of the transferability-regularized multi-label learning method.
Characterizing the Evasion Attackability of Multi-label Classifiers
Dec 21, 2020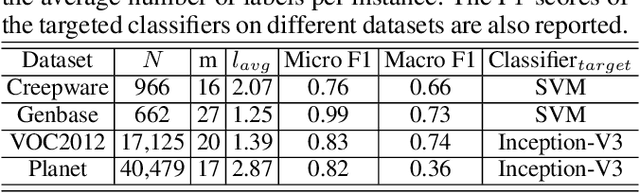


Evasion attack in multi-label learning systems is an interesting, widely witnessed, yet rarely explored research topic. Characterizing the crucial factors determining the attackability of the multi-label adversarial threat is the key to interpret the origin of the adversarial vulnerability and to understand how to mitigate it. Our study is inspired by the theory of adversarial risk bound. We associate the attackability of a targeted multi-label classifier with the regularity of the classifier and the training data distribution. Beyond the theoretical attackability analysis, we further propose an efficient empirical attackability estimator via greedy label space exploration. It provides provably computational efficiency and approximation accuracy. Substantial experimental results on real-world datasets validate the unveiled attackability factors and the effectiveness of the proposed empirical attackability indicator