 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamicGSG: Dynamic 3D Gaussian Scene Graphs for Environment Adaptation
Paper and Code
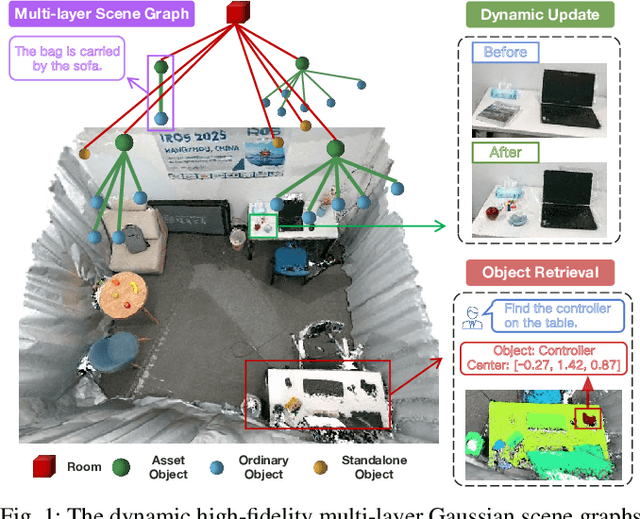
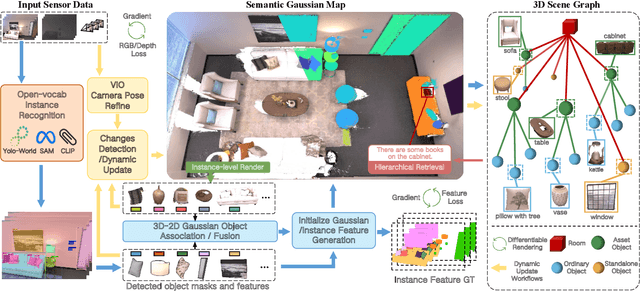
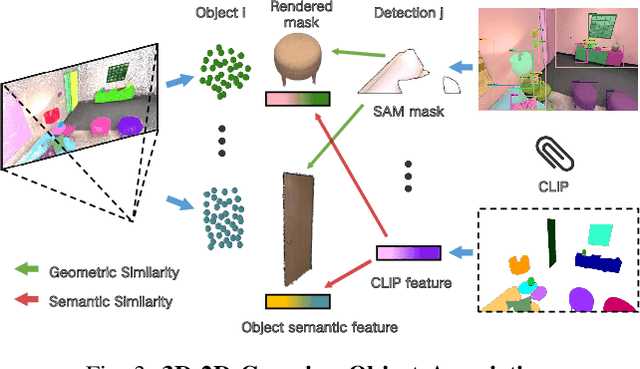
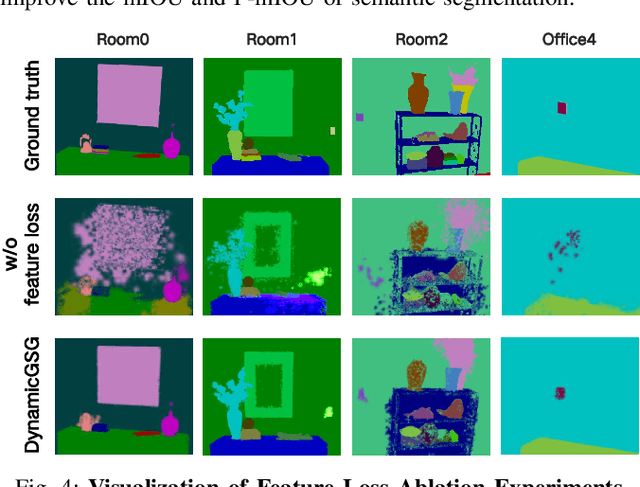
In real-world scenarios, the environment changes caused by agents or human activities make it extremely challenging for robots to perform various long-term tasks. To effectively understand and adapt to dynamic environments, the perception system of a robot needs to extract instance-level semantic information, reconstruct the environment in a fine-grained manner, and update its environment representation in memory according to environment changes. To address these challenges, We propose \textbf{DynamicGSG}, a dynamic, high-fidelity, open-vocabulary scene graph generation system leveraging Gaussian splatting. Our system comprises three key components: (1) constructing hierarchical scene graphs using advanced vision foundation models to represent the spatial and semantic relationships of objects in the environment, (2) designing a joint feature loss to optimize the Gaussian map for incremental high-fidelity reconstruction, and (3) updating the Gaussian map and scene graph according to real environment changes for long-term environment adaptation. Experiments and ablation studies demonstrate the performance and efficacy of the proposed method in terms of semantic segmentation, language-guided object retrieval, and reconstruction quality. Furthermore, we have validated the dynamic updating capabilities of our system in real laboratory environments. The source code will be released at:~\href{https://github.com/GeLuzhou/Dynamic-GSG}{https://github.com/GeLuzhou/DynamicGSG}.