 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemi-distributed Cross-modal Air-Ground Relative Localization
Nov 10, 2025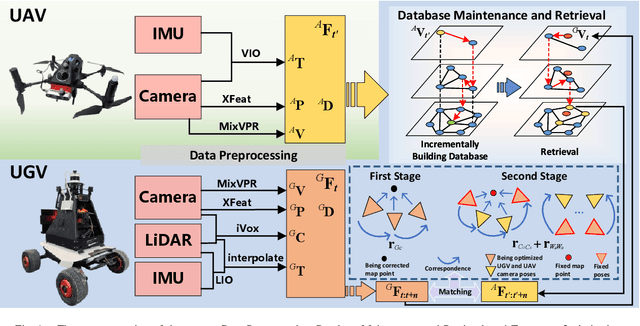

Efficient, accurate, and flexible relative localization is crucial in air-ground collaborative tasks. However, current approaches for robot relative localization are primarily realized in the form of distributed multi-robot SLAM systems with the same sensor configuration, which are tightly coupled with the state estimation of all robots, limiting both flexibility and accuracy. To this end, we fully leverage the high capacity of Unmanned Ground Vehicle (UGV) to integrate multiple sensors, enabling a semi-distributed cross-modal air-ground relative localization framework. In this work, both the UGV and the Unmanned Aerial Vehicle (UAV) independently perform SLAM while extracting deep learning-based keypoints and global descriptors, which decouples the relative localization from the state estimation of all agents. The UGV employs a local Bundle Adjustment (BA) with LiDAR, camera, and an IMU to rapidly obtain accurate relative pose estimates. The BA process adopts sparse keypoint optimization and is divided into two stages: First, optimizing camera poses interpolated from LiDAR-Inertial Odometry (LIO), followed by estimating the relative camera poses between the UGV and UAV. Additionally, we implement an incremental loop closure detection algorithm using deep learning-based descriptors to maintain and retrieve keyframes efficiently. Experimental results demonstrate that our method achieves outstanding performance in both accuracy and efficiency. Unlike traditional multi-robot SLAM approaches that transmit images or point clouds, our method only transmits keypoint pixels and their descriptors, effectively constraining the communication bandwidth under 0.3 Mbps. Codes and data will be publicly available on https://github.com/Ascbpiac/cross-model-relative-localization.git.
Highly Efficient Observation Process based on FFT Filtering for Robot Swarm Collaborative Navigation in Unknown Environments
May 13, 2024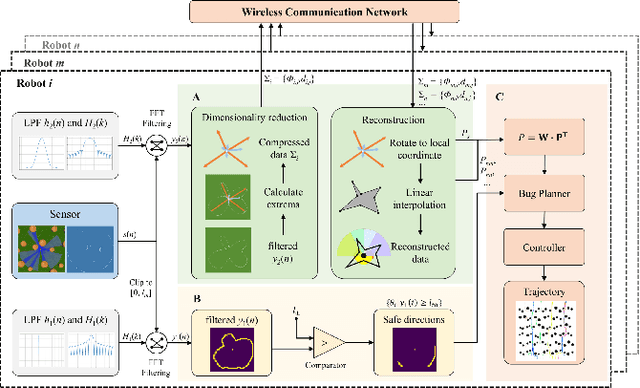
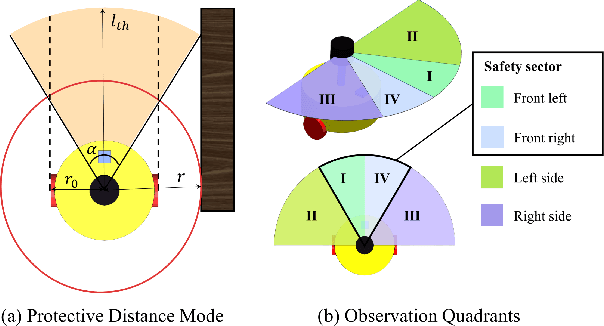
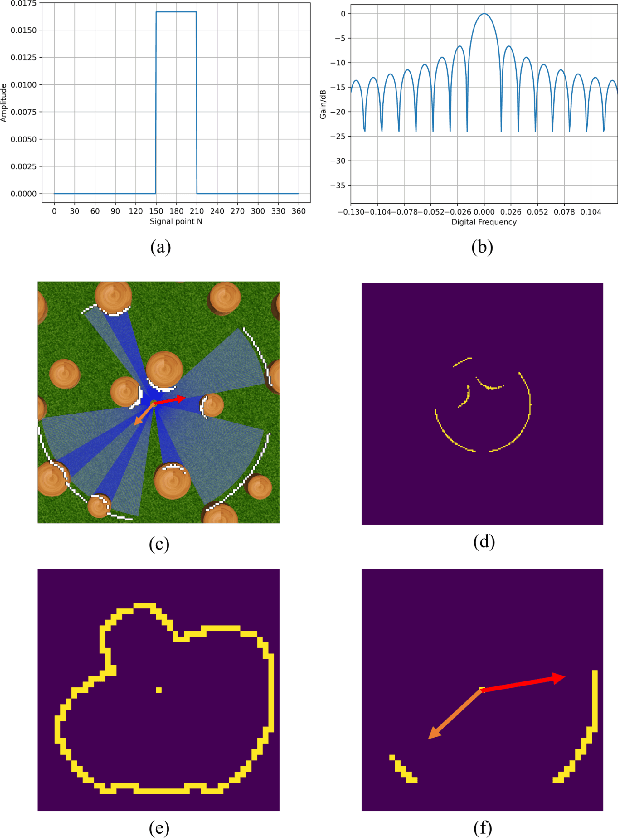
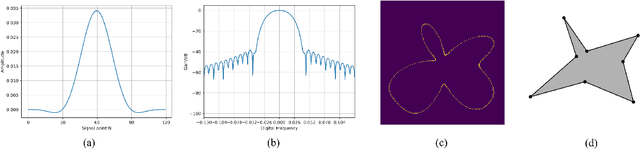
Collaborative path planning for robot swarms in complex, unknown environments without external positioning is a challenging problem. This requires robots to find safe directions based on real-time environmental observations, and to efficiently transfer and fuse these observations within the swarm. This study presents a filtering method based on Fast Fourier Transform (FFT) to address these two issues. We treat sensors' environmental observations as a digital sampling process. Then, we design two different types of filters for safe direction extraction, as well as for the compression and reconstruction of environmental data. The reconstructed data is mapped to probabilistic domain, achieving efficient fusion of swarm observations and planning decision. The computation time is only on the order of microseconds, and the transmission data in communication systems is in bit-level. The performance of our algorithm in sensor data processing was validated in real world experiments, and the effectiveness in swarm path optimization was demonstrated through extensive simulations.
MIPI 2024 Challenge on Nighttime Flare Removal: Methods and Results
Apr 30, 2024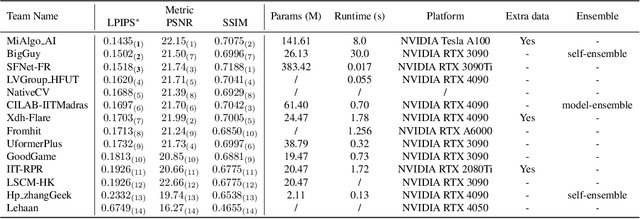
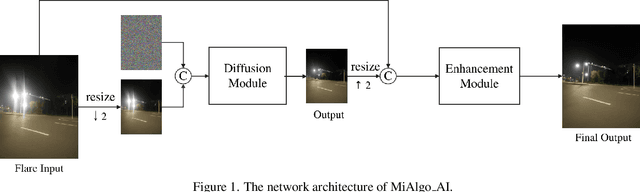
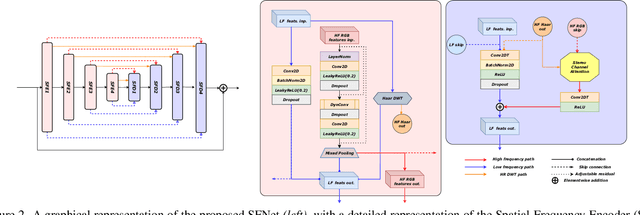
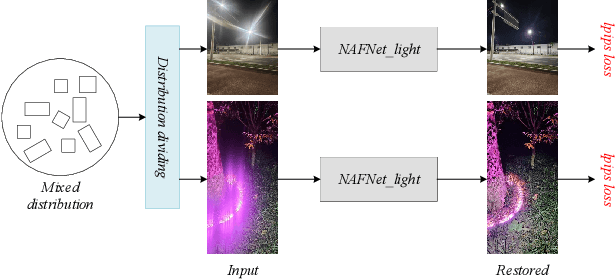
The increasing demand for computational photography and imaging on mobile platforms has led to the widespread development and integration of advanced image sensors with novel algorithms in camera systems. However, the scarcity of high-quality data for research and the rare opportunity for in-depth exchange of views from industry and academia constrain the development of mobile intelligent photography and imaging (MIPI). Building on the achievements of the previous MIPI Workshops held at ECCV 2022 and CVPR 2023, we introduce our third MIPI challenge including three tracks focusing on novel image sensors and imaging algorithms. In this paper, we summarize and review the Nighttime Flare Removal track on MIPI 2024. In total, 170 participants were successfully registered, and 14 teams submitted results in the final testing phase. The developed solutions in this challenge achieved state-of-the-art performance on Nighttime Flare Removal. More details of this challenge and the link to the dataset can be found at https://mipi-challenge.org/MIPI2024/.
Creativity of AI: Automatic Symbolic Option Discovery for Facilitating Deep Reinforcement Learning
Dec 18, 2021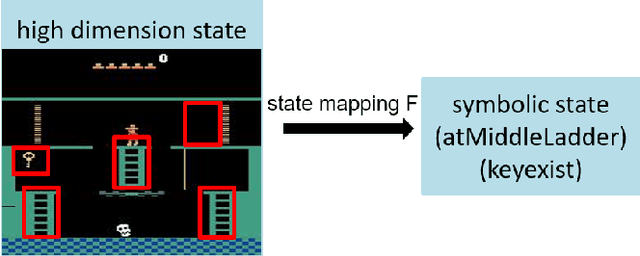
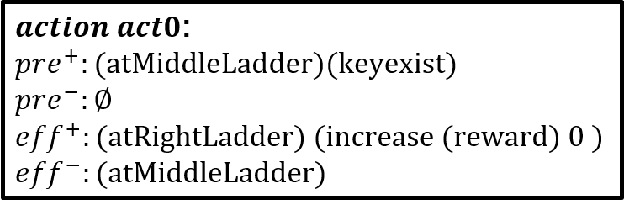

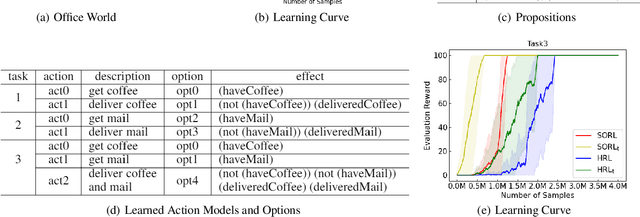
Despite of achieving great success in real life, Deep Reinforcement Learning (DRL) is still suffering from three critical issues, which are data efficiency, lack of the interpretability and transferability. Recent research shows that embedding symbolic knowledge into DRL is promising in addressing those challenges. Inspired by this, we introduce a novel deep reinforcement learning framework with symbolic options. This framework features a loop training procedure, which enables guiding the improvement of policy by planning with action models and symbolic options learned from interactive trajectories automatically. The learned symbolic options alleviate the dense requirement of expert domain knowledge and provide inherent interpretability of policies. Moreover, the transferability and data efficiency can be further improved by planning with the action models. To validate the effectiveness of this framework, we conduct experiments on two domains, Montezuma's Revenge and Office World, respectively. The results demonstrate the comparable performance, improved data efficiency, interpretability and transferability.
The Powerful Use of AI in the Energy Sector: Intelligent Forecasting
Nov 03, 2021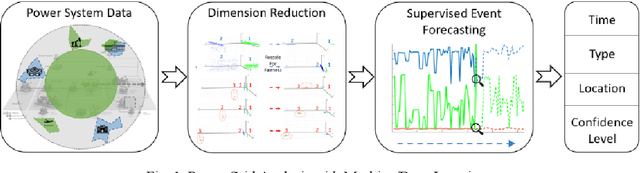
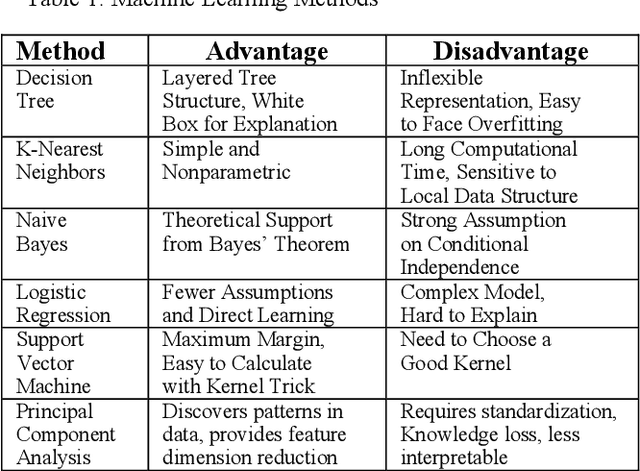
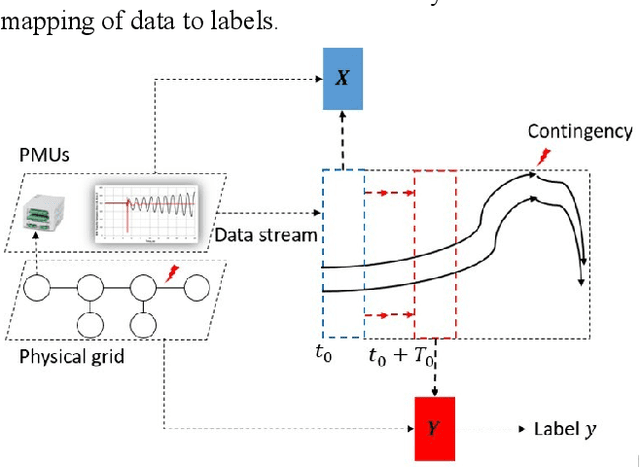
Artificial Intelligence (AI) techniques continue to broaden across governmental and public sectors, such as power and energy - which serve as critical infrastructures for most societal operations. However, due to the requirements of reliability, accountability, and explainability, it is risky to directly apply AI-based methods to power systems because society cannot afford cascading failures and large-scale blackouts, which easily cost billions of dollars. To meet society requirements, this paper proposes a methodology to develop, deploy, and evaluate AI systems in the energy sector by: (1) understanding the power system measurements with physics, (2) designing AI algorithms to forecast the need, (3) developing robust and accountable AI methods, and (4) creating reliable measures to evaluate the performance of the AI model. The goal is to provide a high level of confidence to energy utility users. For illustration purposes, the paper uses power system event forecasting (PEF) as an example, which carefully analyzes synchrophasor patterns measured by the Phasor Measurement Units (PMUs). Such a physical understanding leads to a data-driven framework that reduces the dimensionality with physics and forecasts the event with high credibility. Specifically, for dimensionality reduction, machine learning arranges physical information from different dimensions, resulting inefficient information extraction. For event forecasting, the supervised learning model fuses the results of different models to increase the confidence. Finally, comprehensive experiments demonstrate the high accuracy, efficiency, and reliability as compared to other state-of-the-art machine learning methods.
Learning Symbolic Rules for Interpretable Deep Reinforcement Learning
Mar 16, 2021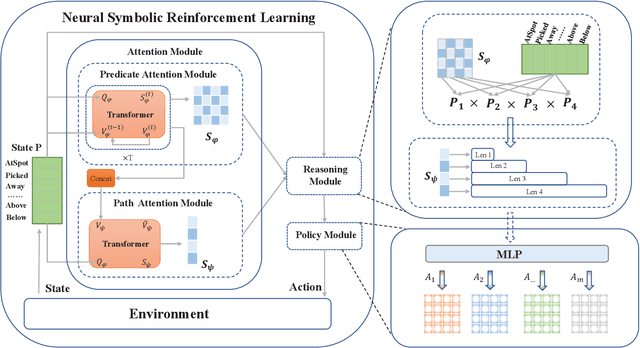
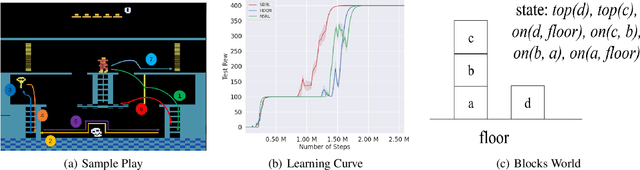
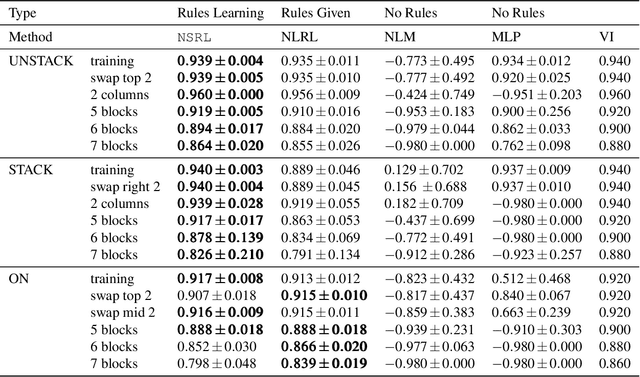
Recent progress in deep reinforcement learning (DRL) can be largely attributed to the use of neural networks. However, this black-box approach fails to explain the learned policy in a human understandable way. To address this challenge and improve the transparency, we propose a Neural Symbolic Reinforcement Learning framework by introducing symbolic logic into DRL. This framework features a fertilization of reasoning and learning modules, enabling end-to-end learning with prior symbolic knowledge. Moreover, interpretability is achieved by extracting the logical rules learned by the reasoning module in a symbolic rule space. The experimental results show that our framework has better interpretability, along with competing performance in comparison to state-of-the-art approaches.