 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Collaborative Navigation through Perception Fusion for Multi-Robots in Unknown Environments
Nov 02, 2024For tasks conducted in unknown environments with efficiency requirements, real-time navigation of multi-robot systems remains challenging due to unfamiliarity with surroundings.In this paper, we propose a novel multi-robot collaborative planning method that leverages the perception of different robots to intelligently select search directions and improve planning efficiency. Specifically, a foundational planner is employed to ensure reliable exploration towards targets in unknown environments and we introduce Graph Attention Architecture with Information Gain Weight(GIWT) to synthesizes the information from the target robot and its teammates to facilitate effective navigation around obstacles.In GIWT, after regionally encoding the relative positions of the robots along with their perceptual features, we compute the shared attention scores and incorporate the information gain obtained from neighboring robots as a supplementary weight. We design a corresponding expert data generation scheme to simulate real-world decision-making conditions for network training. Simulation experiments and real robot tests demonstrates that the proposed method significantly improves efficiency and enables collaborative planning for multiple robots. Our method achieves approximately 82% accuracy on the expert dataset and reduces the average path length by about 8% and 6% across two types of tasks compared to the fundamental planner in ROS tests, and a path length reduction of over 6% in real-world experiments.
A Social Force Model for Multi-Agent Systems With Application to Robots Traversal in Cluttered Environments
Sep 16, 2024



This letter presents a model to address the collaborative effects in multi-agent systems from the perspective of microscopic mechanism. The model utilizes distributed control for robot swarms in traversal applications. Inspired by pedestrian planning dynamics, the model employs three types of forces to regulate the behavior of agents: intrinsic propulsion, interaction among agents, and repulsion from obstacles. These forces are able to balance the convergence, divergence and avoidance effects among agents. Additionally, we present a planning and decision method based on resultant forces to enable real-world deployment of the model. Experimental results demonstrate the effectiveness on system path optimization in unknown cluttered environments. The sensor data is swiftly digital filtered and the data transmitted is significantly compressed. Consequently, the model has low computation costs and minimal communication loads, thereby promoting environmental adaptability and system scalability.
Highly Efficient Observation Process based on FFT Filtering for Robot Swarm Collaborative Navigation in Unknown Environments
May 13, 2024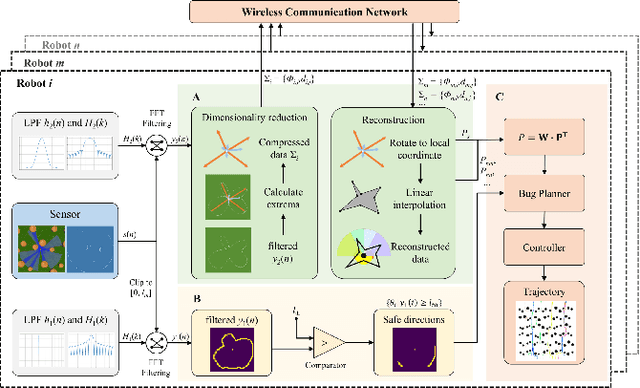
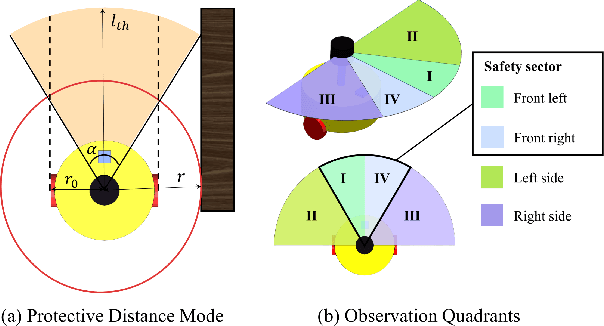
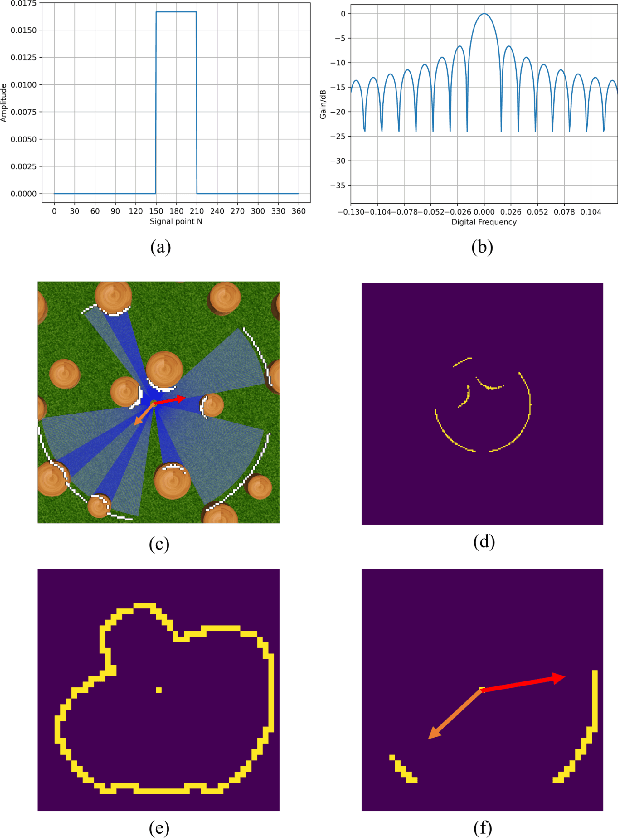
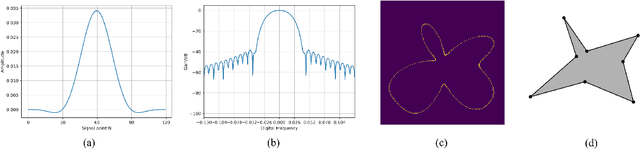
Collaborative path planning for robot swarms in complex, unknown environments without external positioning is a challenging problem. This requires robots to find safe directions based on real-time environmental observations, and to efficiently transfer and fuse these observations within the swarm. This study presents a filtering method based on Fast Fourier Transform (FFT) to address these two issues. We treat sensors' environmental observations as a digital sampling process. Then, we design two different types of filters for safe direction extraction, as well as for the compression and reconstruction of environmental data. The reconstructed data is mapped to probabilistic domain, achieving efficient fusion of swarm observations and planning decision. The computation time is only on the order of microseconds, and the transmission data in communication systems is in bit-level. The performance of our algorithm in sensor data processing was validated in real world experiments, and the effectiveness in swarm path optimization was demonstrated through extensive simulations.